Hello, Habr!This article describes the suffering of a beginner in the process of manufacturing a self-propelled platform platform based on the esp8266 MK with micropython , managed through an integrated web server.KDPV: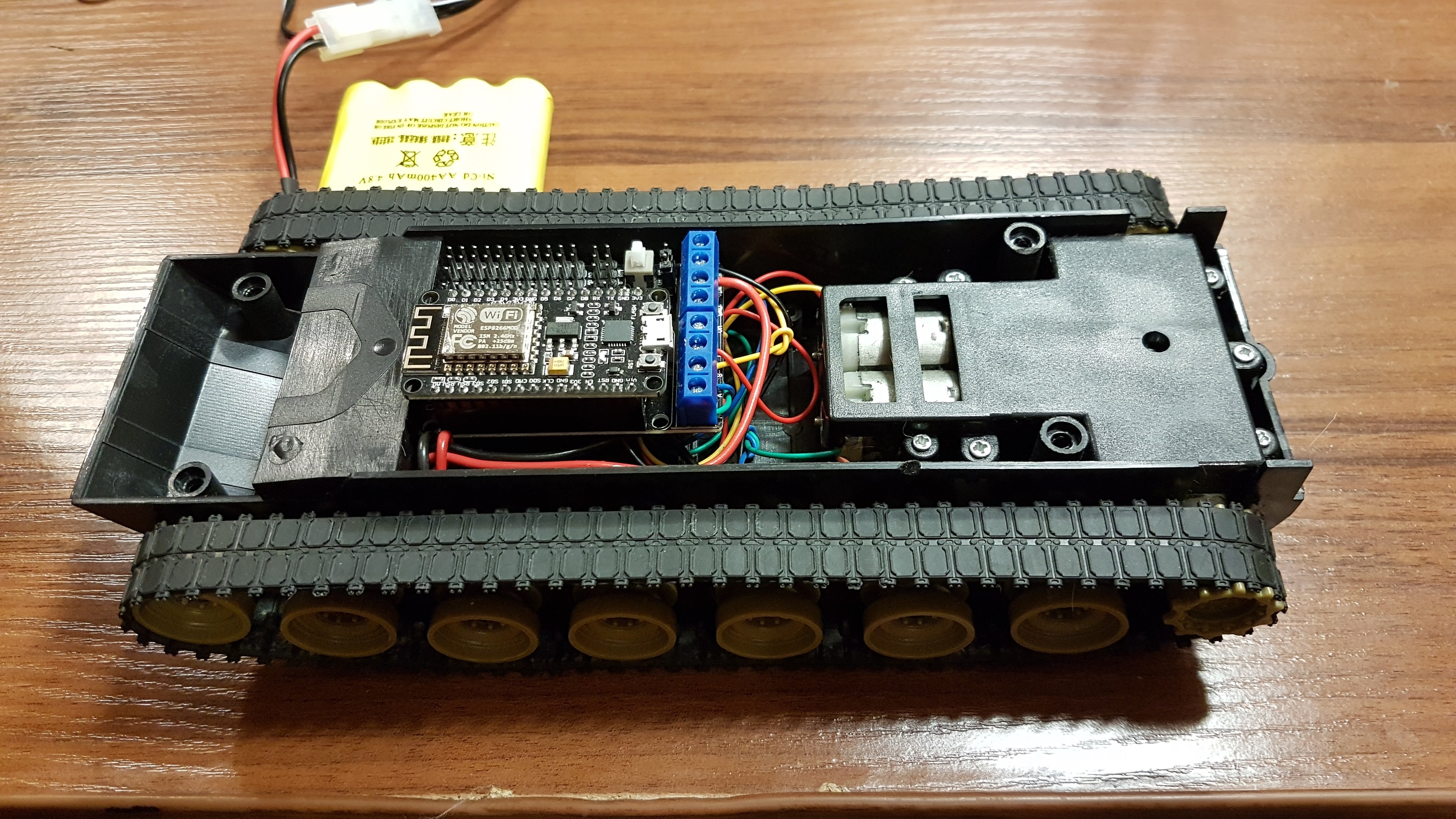 As I mentioned in the first article , the project is educational, so please do not judge strictly.So, the task of the first stage is to make a caterpillar platform that can be controlled via wi-fi.For this, an old toy tank was found in the bins, as well as the MK esp8266 (ESP-12E) and a motor driver for it were purchased.
As I mentioned in the first article , the project is educational, so please do not judge strictly.So, the task of the first stage is to make a caterpillar platform that can be controlled via wi-fi.For this, an old toy tank was found in the bins, as well as the MK esp8266 (ESP-12E) and a motor driver for it were purchased.esp8266 and motorshield assembly Further, all of the above was assembled in accordance with the scheme: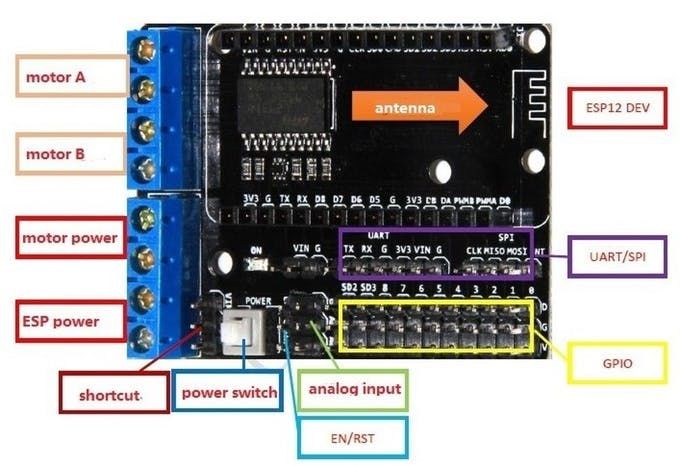 And after a
And after a couple of days of a brief study of the documentation , it became clear how to control the motors:from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
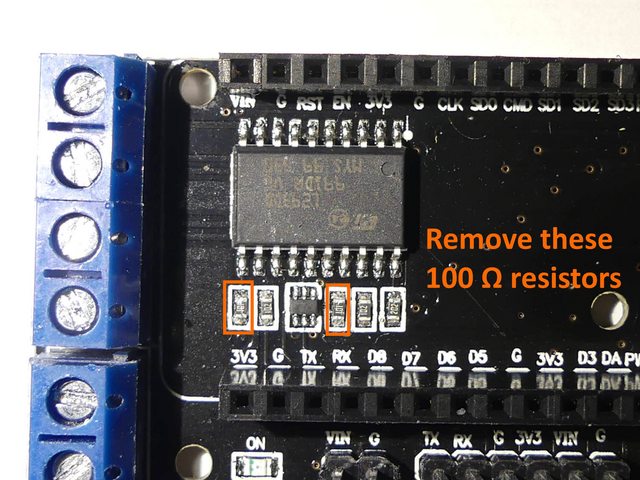
Thus, pin5 and pin4 - allow you to set the speed of rotation of the motors through the PWM, and pin0 and pin2 - control the reverse for outputs "A" and "B", respectively. In addition, since the LED is also connected to pin2 on my board, then we observe light effects in parallel with the movement :)However, it didn’t immediately take off ...Google on a given topic led to a forum where there was a recommendation to remove two “extra” resistors, which was done. Quote from there:I measured these resistors, at the input to the L293DD, the resistance is 1K, but they have a resistance of only 100 ohms to ground. This means that the input signal from the NodeMCU controller cannot reach the L293DD. I really don’t know why they are there - L293DD can process up to 7 V at its input, and NodeMCU gives a 3.3 V output.
I removed these two 100 Ohm resistors (the first and third on the left when the antenna is on the right), and now Shield works.
 After that, things went smoothly, and
After that, things went smoothly, andfinal version of the code
import network
import socket
from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
""" function for connecting to your local WiFi network """
def do_connect():
essid = 'home_wifi'
password = '12345678'
sta_if = network.WLAN(network.STA_IF)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect(essid, password)
while not sta_if.isconnected():
pass
print('network config:', sta_if.ifconfig())
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
def web_page(request):
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
forward()
if request.find('GET /?left') > 0:
motor_state="Rotate Left"
left()
if request.find('GET /?right') > 0:
motor_state="Rotate Right"
right()
if request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
left_turn()
if request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
right_turn()
if request.find('GET /?backward') > 0:
motor_state="Going Backward"
backward()
if request.find('GET /?stop') > 0:
motor_state="Stopped"
stop_all()
html = """<html><head><title>RoboTank WEB</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="data:,"> <style>
html{font-family: Helvetica; display:inline-block; margin: 0px auto; text-align: center;}
h1{color: #0F3376; padding: 2vh;}p{font-size: 1.5rem;}
.button{display: inline-block; background-color: #33c080; border: none;
border-radius: 4px; color: white; text-decoration: none; font-size: 30px; width:100%}
.button2{background-color: #4286f4; width:30%}
.button3{background-color: #eb2b10; width:35%}
.button4{background-color: #8386f4; width:44%}
</style></head>
<body> <h1>RoboTank WEB</h1>
<p>Status : <strong>""" + motor_state + """</strong></p>
<p><a href='/?forward'><button class="button">Forward</button></a></p>
<p><a href='/?left_turn'><button class="button button2">LEFT</button></a>
<a href='/?stop'><button class="button button3">STOP</button></a>
<a href='/?right_turn'><button class="button button2">RIGHT</button></a>
<p><a href='/?backward'><button class="button">Backward</button></a></p>
<p><a href='/?left'><button class="button button4">L-rotate</button></a>
<a href='/?right'><button class="button button4">R-rotate</button></a></p>
</body></html>"""
return html
stop_all()
do_connect()
addr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]
s = socket.socket()
try:
s.bind(addr)
s.listen(1)
except:
s.close()
s.bind(addr)
s.listen(1)
while True:
conn, addr = s.accept()
print('Got a connection from %s' % str(addr))
request = conn.recv(1024)
request = str(request)
print('The Content = %s' % request)
response = web_page(request)
conn.send('HTTP/1.1 200 OK\n')
conn.send('Content-Type: text/html\n')
conn.send('Connection: close\n\n')
conn.sendall(response)
conn.close()
It turned out to be quite efficient, and successfully solving the task set at the first stage.The first pokatushki:The first part (Installing micropython on ESP8266 and working with it under Linux)The next part (Simple robot on MK esp8266 with micropython)Sources of inspiration:funprojects.blog/2019/02/12/micropython-air-boatwww.instructables.com/id / Simplest-Wifi-Car-Using-ESP8266-Motorshieldforum.micropython.org/viewtopic.php?t=3977randomnerdtutorials.com/esp32-esp8266-micropython-web-serverdocs.micropython.org/en/latest/esp8266/ tutorial / index.html