 美好的一天。我向您介绍Try Khov撰写的文章“图形算法:深度优先搜索(DFS)和广度优先搜索(BFS)”的翻译。
美好的一天。我向您介绍Try Khov撰写的文章“图形算法:深度优先搜索(DFS)和广度优先搜索(BFS)”的翻译。什么是图遍历?
用简单的话来说,图遍历是从一个顶点到另一个顶点的过渡,以寻找这些顶点的连接属性。链接(连接顶点的线)称为图的方向,路径,面或边。图的顶点也称为节点。两种主要的图遍历算法是深度优先搜索DFS和广度优先搜索BFS。尽管两种算法都用于遍历图形,但它们还是有一些区别。让我们从DFS开始。深度搜寻
DFS遵循“深入,先行”的概念。这个想法是,我们从起始峰(点,位置)沿某个方向(沿着特定路径)移动,直到到达路径或目的地的终点(所需峰)。如果我们已到达路径的尽头,但不是目的地,那么我们将返回(到达分支或分支路径的点)并沿着另一条路线走。让我们看一个例子。假设我们有一个有向图,如下所示: 我们在点“ s”上,我们需要找到顶点“ t”。使用DFS,我们研究了其中一种可能的路径,一直沿其移动到终点,如果找不到t,则返回并探索另一条路径。流程如下所示:
我们在点“ s”上,我们需要找到顶点“ t”。使用DFS,我们研究了其中一种可能的路径,一直沿其移动到终点,如果找不到t,则返回并探索另一条路径。流程如下所示: 在这里,我们沿着路径(p1)移动到最近的峰值,并看到这不是路径的终点。因此,我们进入下一个高峰。
在这里,我们沿着路径(p1)移动到最近的峰值,并看到这不是路径的终点。因此,我们进入下一个高峰。 我们到达了p1的尽头,但是没有找到t,所以我们回到s并沿着第二条路径移动。
我们到达了p1的尽头,但是没有找到t,所以我们回到s并沿着第二条路径移动。 到达最接近点“ s”的路径“ p2”的顶部之后,我们看到了三个可能进一步运动的方向。由于我们已经到达了第一个方向的山峰,因此我们沿着第二个方向移动。
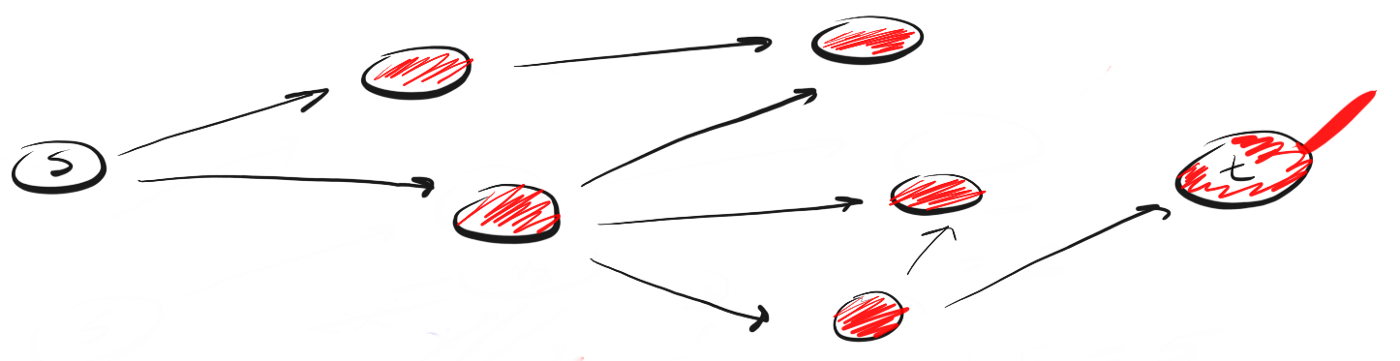
到达最接近点“ s”的路径“ p2”的顶部之后,我们看到了三个可能进一步运动的方向。由于我们已经到达了第一个方向的山峰,因此我们沿着第二个方向移动。 我们再次到达路径的尽头,但没有找到t,因此我们返回。我们遵循第三条路径,最后达到所需的峰值“ t”。
我们再次到达路径的尽头,但没有找到t,因此我们返回。我们遵循第三条路径,最后达到所需的峰值“ t”。 这就是DFS的工作方式。我们沿着一定的道路前进到终点。如果路径的末端是所需的峰,则完成。如果没有,请返回并选择其他路径,直到我们探索所有选项为止。对于每个访问的顶点,我们都遵循此算法。需要重复重复该过程表明需要使用递归来实现算法。这是JavaScript代码:
这就是DFS的工作方式。我们沿着一定的道路前进到终点。如果路径的末端是所需的峰,则完成。如果没有,请返回并选择其他路径,直到我们探索所有选项为止。对于每个访问的顶点,我们都遵循此算法。需要重复重复该过程表明需要使用递归来实现算法。这是JavaScript代码:
function dfs(adj, v, t) {
if(v === t) return true
if(v.visited) return false
v.visited = true
for(let neighbor of adj[v]) {
if(!neighbor.visited) {
let reached = dfs(adj, neighbor, t)
if(reached) return true
}
}
return false
}
注意:这种特殊的DFS算法允许您检查是否可以从一个地方到达另一个地方。DFS可以用于各种目的。这些目标将确定算法本身的外观。但是,一般概念看起来完全像那样。DFS分析
让我们分析一下这种算法。由于我们绕过每个节点的每个“邻居”,而忽略了我们先前访问的节点,因此运行时等于O(V + E)。V + E的含义的简要说明:V是顶点的总数。 E是面(边缘)的总数。使用V * E似乎更合适,但让我们考虑一下V * E的含义。V * E表示对于每个顶点,我们必须研究图形的所有面,而不管这些面是否属于特定的顶点。另一方面,V + E表示对于每个顶点,我们仅评估与其相邻的边。回到示例,每个顶点都有一定数量的面,在最坏的情况下,我们绕过所有顶点(O(V))并检查所有面(O(E))。我们有V个顶点和E个面,所以我们得到V +E。此外,由于我们使用递归遍历每个顶点,因此这意味着使用了堆栈(无限递归会导致堆栈溢出错误)。因此,空间复杂度为O(V)。现在考虑BFS。广泛搜索
BFS遵循“扩大范围,达到鸟类飞行的高度”的概念(“扩大范围,鸟瞰”)。 BFS并非每次都向前移动一个邻居,而是沿着某个路径移动到终点。这意味着以下内容:BFS不是沿着路径运行,而是意味着在单个操作(步骤)中访问最接近s的邻居,然后访问邻居的邻居,依此类推,直到检测到t。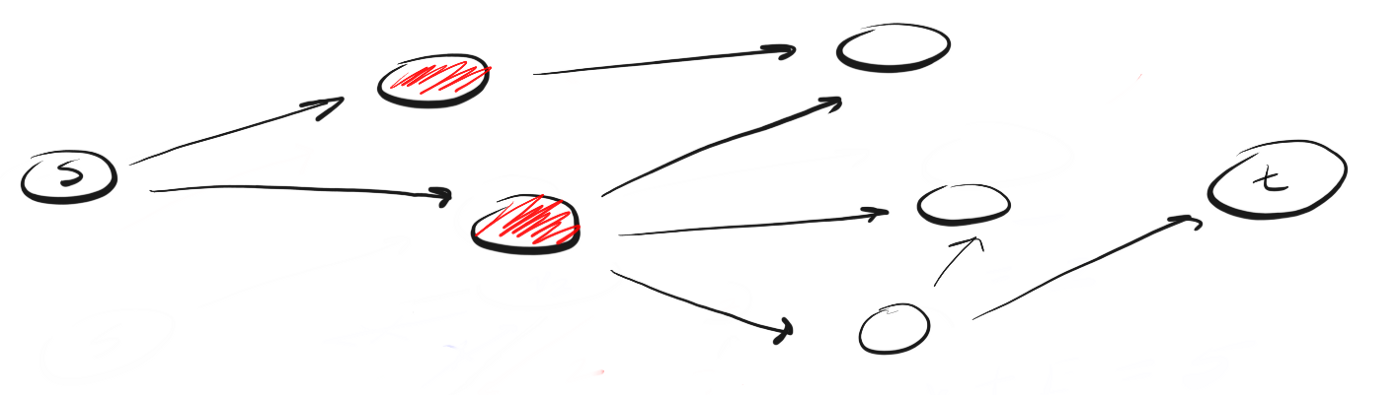

 DFS与BFS有何不同?我喜欢认为DFS可以继续前进,而BFS并不着急,而是一步一步地研究所有内容。随之而来的问题是:您如何知道应该首先拜访哪些邻居?为此,我们可以使用队列中的“先进先出”(先进先出,FIFO)概念。我们首先将最接近我们的峰排队,然后将其未访问的邻居排队,并继续此过程,直到队列为空或找到要寻找的顶点为止。这是代码:
DFS与BFS有何不同?我喜欢认为DFS可以继续前进,而BFS并不着急,而是一步一步地研究所有内容。随之而来的问题是:您如何知道应该首先拜访哪些邻居?为此,我们可以使用队列中的“先进先出”(先进先出,FIFO)概念。我们首先将最接近我们的峰排队,然后将其未访问的邻居排队,并继续此过程,直到队列为空或找到要寻找的顶点为止。这是代码:
function bfs(adj, s, t) {
let queue = []
queue.push(s)
s.visited = true
while(queue.length > 0) {
let v = queue.shift()
for(let neighbor of adj[v]) {
if(!neighbor.visited) {
queue.push(neighbor)
neighbor.visited = true
if(neighbor === t) return true
}
}
}
return false
}
BFS分析
看来BFS速度较慢。但是,如果仔细观察这些可视化,您会发现它们具有相同的运行时。队列涉及在到达目的地之前处理每个顶点。这意味着,在最坏的情况下,BFS会探索所有顶点和面。尽管事实上BFS似乎较慢,但实际上却更快,因为在处理大型图形时,发现DFS花费大量时间遵循最终被证明是错误的路径。 BFS通常用于查找两个峰之间的最短路径。因此,BFS运行时也是O(V + E),并且由于我们使用包含所有顶点的队列,因此其空间复杂度为O(V)。现实生活中的类比
如果您从现实生活中进行类比,那么这就是我想象DFS和BFS的工作的方式。当我想到DFS时,我想象在迷宫中寻找食物的鼠标。为了到达目标,鼠标被迫多次陷入死胡同,以不同的方式返回并移动,依此类推,直到找到摆脱迷宫或食物的出路。 一个简化的版本看起来像这样:
一个简化的版本看起来像这样: 反过来,当我想到BFS时,我想象着水面上的圆圈。石头掉入水中会导致干扰(圆形)从中心向各个方向扩散。
反过来,当我想到BFS时,我想象着水面上的圆圈。石头掉入水中会导致干扰(圆形)从中心向各个方向扩散。 简化版本如下所示:
简化版本如下所示:
发现
- 深度和广度搜索用于遍历图形。
- DFS沿着边缘来回移动,而BFS遍布邻居以寻找目标。
- DFS使用堆栈,而BFS使用队列。
- 两者的运行时间均为O(V + E),空间复杂度为O(V)。
- 这些算法具有不同的原理,但对于处理图形同样重要。
注意 回复:我不是算法和数据结构方面的专家,因此,如果发现错误,不准确或公式不正确,请写一封个人信函以进行更正和澄清。我会很感激。感谢您的关注。