 他们说俄罗斯人使用了很长一段时间,但是走得快。5年前,在读了一篇有关软盘驱动器上的播放器的文章后,我想到了收集半个段落的想法。首先,我在软盘上找到了一个绘图机器人,然后是半个段落。不要问这是什么关系,不是。手册大多与指导书一起使用。
他们说俄罗斯人使用了很长一段时间,但是走得快。5年前,在读了一篇有关软盘驱动器上的播放器的文章后,我想到了收集半个段落的想法。首先,我在软盘上找到了一个绘图机器人,然后是半个段落。不要问这是什么关系,不是。手册大多与指导书一起使用。配饰
- Arduino Uno
- AdaFruit的Motorshield电动机驱动器。我有一个用于Arduino / Wze的Motor Drive Shield L293D。
- 2个步进电机NEMA-17。我使用了混合式步进电机42BYGH202 / Wze。

- AC / DC电源
- 吊船。我是从磁盘架上制成的,我需要在连接线的地方开两个孔,第三个用于负载。

Instructionsables.com - 底盘来自缝纫机的梭芯(梭芯和发动机轴之间有缝隙,我放了一块橡胶)。最好使用钓鱼线,而不是线。
- 电机安装的表面。越大越好。具有指导意义的作者使用了马达支架(托架),我将它们固定在我粘贴到A2平板电脑的纸板上。
Arduino的
安装最新版本的Arduino IDE(旧版本无法加载代码)。用草图(/ sketchs /)设置文件夹的路径:文件->设置->草图文件夹的位置。从euphy github下载代码。解压缩档案。将Adafruit和AccelStepper库复制到/ sketchs / libraries /文件夹,将polargraph_server_a1文件夹复制到/ sketches /文件夹。启动Arduino IDE。文件->带有草图的文件夹-> polargraph_server_a1。我们编译,上传到板子。步进马达
关于步进电机,Habr上有一篇很棒的文章。通过反复试验,我将它们连接到板上:左侧发动机-接线端子M1,M2,右侧-M3,M4。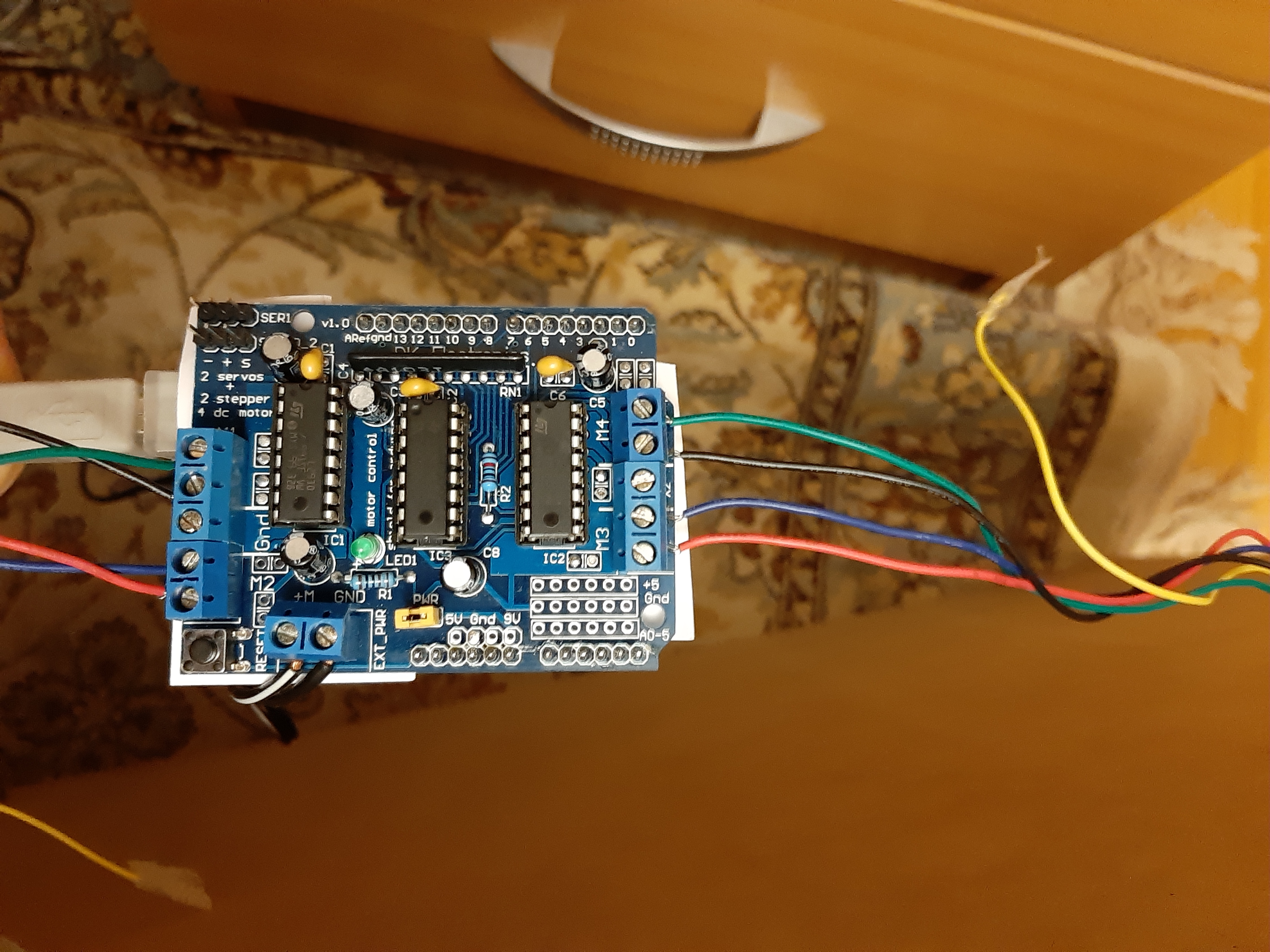
软件安装
从先前下载的euphy存档中,解压缩/ controller /文件夹。在default.properties.txt文件中,指定必要的尺寸:机器的宽度和长度,工作表的宽度和长度,起始点。它们需要非常精确地测量到毫米,否则图像中会出现失真。我将在下面显示一个示例,事实就是这样。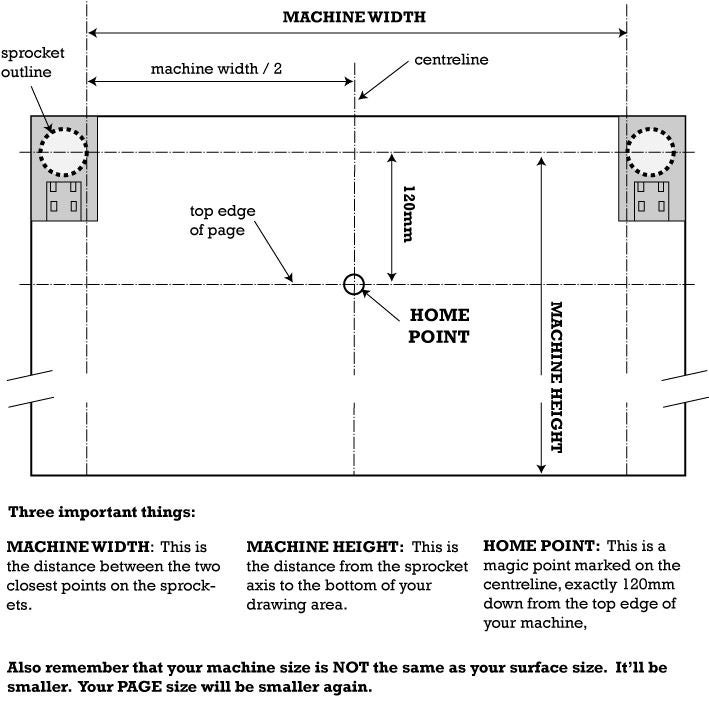 Instructionsables.com启动应用程序:
Instructionsables.com启动应用程序:sudo chmod +x polargraphcontroller
./polargraphcontroller
 在设置选项卡中,选择所需的端口(SERIAL PORT)。在准备好poshraf的顶部应出现绿色铭文。将吊船设置到HOME POINT点。在“输入”选项卡上,选择“加载图像”。上载图像,并根据需要调整尺寸(调整图像尺寸)。将图像(移动图像)移动到图纸区域,选择所需的片段(选择区域),必要时减小GRID SIZE,然后按RENDER PIXELS。在弹出窗口中,您需要选择绘图(TOP-RIGHT)和样式(VARIABLE SIZE SQUARE WAVE)的开始位置。
在设置选项卡中,选择所需的端口(SERIAL PORT)。在准备好poshraf的顶部应出现绿色铭文。将吊船设置到HOME POINT点。在“输入”选项卡上,选择“加载图像”。上载图像,并根据需要调整尺寸(调整图像尺寸)。将图像(移动图像)移动到图纸区域,选择所需的片段(选择区域),必要时减小GRID SIZE,然后按RENDER PIXELS。在弹出窗口中,您需要选择绘图(TOP-RIGHT)和样式(VARIABLE SIZE SQUARE WAVE)的开始位置。 在右侧,要启动命令队列,请单击红色铭文(变为绿色):ommandQueue:QUEUE RUNNING。我花了大约一个小时来画题字。右上角的Doodle,因为我首先选择了SCRIBBLE样式。由于测量不准确,因此可以看到Y轴压缩。
在右侧,要启动命令队列,请单击红色铭文(变为绿色):ommandQueue:QUEUE RUNNING。我花了大约一个小时来画题字。右上角的Doodle,因为我首先选择了SCRIBBLE样式。由于测量不准确,因此可以看到Y轴压缩。 速度为半段。
速度为半段。