
Exemplo de trabalho de modelo de movimento de primeira ordem
É possível fazer um filme inteiro a partir de uma fotografia? E depois de gravar os movimentos de uma pessoa, substitua-o por outro no vídeo? Obviamente, a resposta a essas perguntas é extremamente importante para áreas como cinema, fotografia e desenvolvimento de jogos de computador. A solução pode ser o processamento de fotos digitais usando software especializado. O problema em questão entre especialistas neste campo é chamado de tarefa de síntese automática de vídeo ou animação de imagem.
Para obter o resultado esperado, as abordagens existentes combinam objetos extraídos da imagem original e movimentos que podem ser entregues como um vídeo separado - “doador”.
Agora, na maioria das áreas, a animação de imagens é feita usando ferramentas de computação gráfica. Essa abordagem requer conhecimento adicional sobre o objeto que queremos animar - seu modelo 3D geralmente é necessário (como ele funciona agora na indústria cinematográfica pode ser encontrado aqui ). A maioria das soluções mais recentes para esse problema se baseia em treinamento aprofundado de modelos, baseados em redes neurais generativas competitivas (GAN) e auto-codificadores variacionais (VAE). Esses modelos geralmente usam módulos pré-treinados para procurar pontos-chave dos objetos na imagem. O principal problema dessa abordagem é que esses módulos podem reconhecer apenas os objetos nos quais foram treinados.
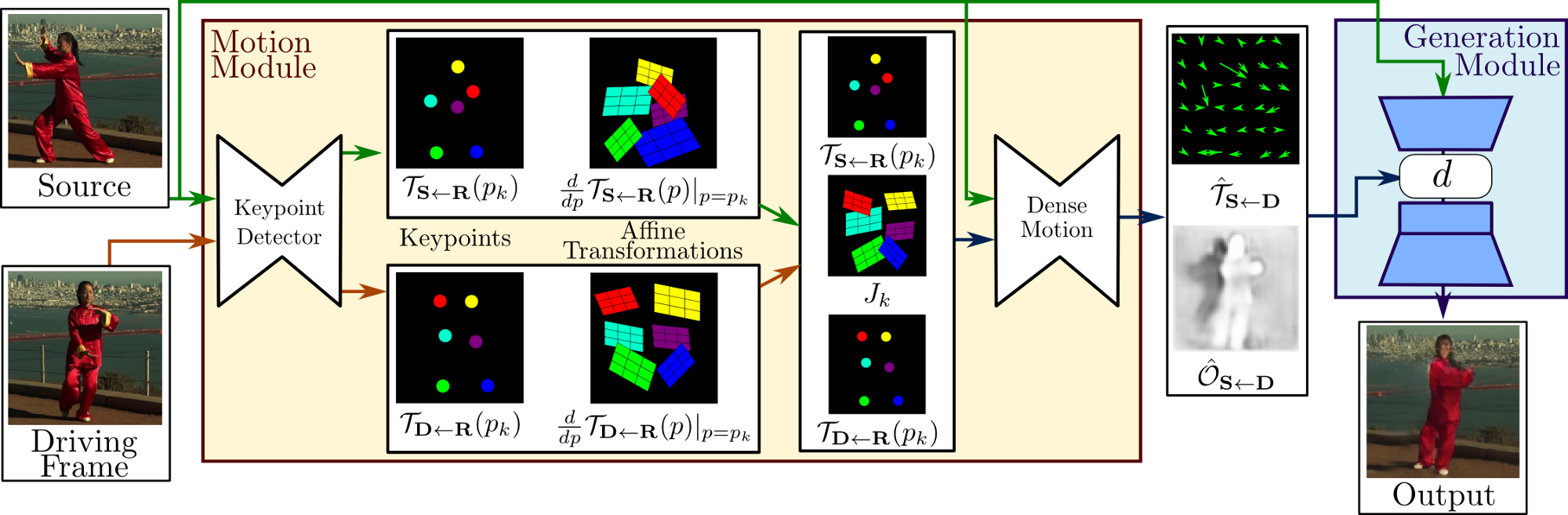
, ? «First Order Motion Model for Image Animation». — First Order Motion Model, . , (, , ), , .
…
, .
, , (occlusion map). . , , .
: .
. .
. , ( ) . . .
.
. . , ( ), . , , . , .
:

, , .
:
. U-Net, , .
softmax , .
( ), . , , , , . , (), . U-Net.
:

— ( — ) :

, . , . down-sampling . c . , . — , , , . :
, — ( ).
, . , .
, . reconstruction loss, . - VGG-19. reconstruction loss :
— , — , — i- , VGG-19, — .
- . . , . , . , , , .
, , , thin plane spline. . ,
. C :
( — ):

. , reconstruction loss 2 .
, . . , :

, — .
!
4 :
- VoxCeleb — 22496 , YouTube;
- UvA-Nemo — , 1240 ;
- BAIR robot pushing — , , , . 42880 128 .
- 280 TaiChi YouTube.
X2Face Monkey-Net, .

Como pode ser visto na tabela, o modelo de movimento de primeira ordem é superior a outras abordagens em todos os aspectos.
Os tão esperados exemplos

Mgif

moda
Agora tente você mesmo! É muito simples, tudo está preparado aqui .