Olá Habr!Este artigo descreve o sofrimento de um iniciante no processo de fabricação de uma plataforma de plataforma automotora baseada no esp8266 MK com micropython , gerenciada por um servidor da Web integrado.KDPV: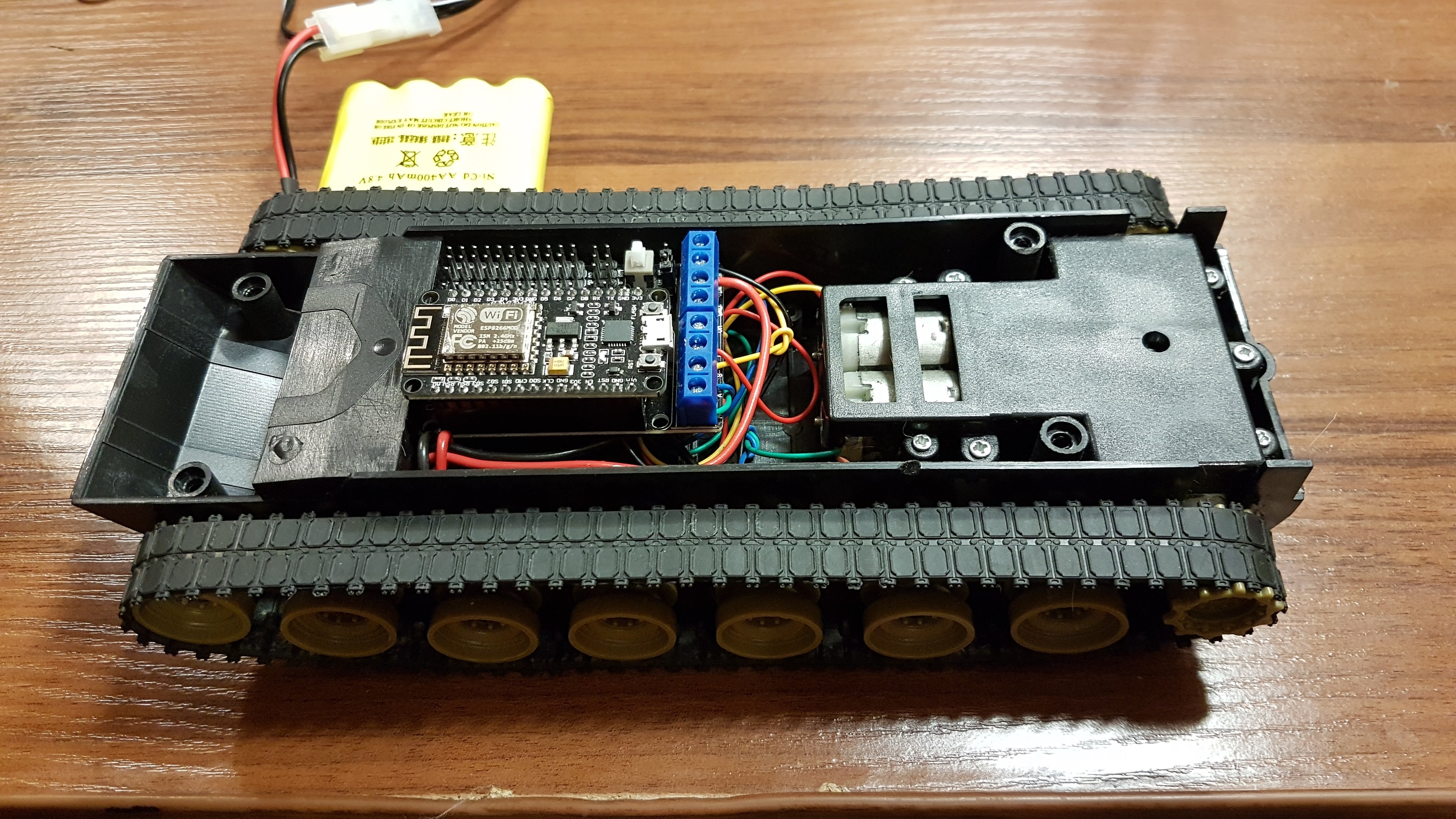 Como mencionei no primeiro artigo , o projeto é educacional, portanto, não julgue rigorosamente.Portanto, a tarefa do primeiro estágio é criar uma plataforma lagarta que possa ser controlada via wi-fi.Para que finalidade, nas caixas, foi encontrado um velho tanque de brinquedos, e também foram adquiridos o MK esp8266 (ESP-12E) e um driver de motor.
Como mencionei no primeiro artigo , o projeto é educacional, portanto, não julgue rigorosamente.Portanto, a tarefa do primeiro estágio é criar uma plataforma lagarta que possa ser controlada via wi-fi.Para que finalidade, nas caixas, foi encontrado um velho tanque de brinquedos, e também foram adquiridos o MK esp8266 (ESP-12E) e um driver de motor.esp8266 e montagem do motor Além disso, todos os itens acima foram coletados de acordo com o esquema: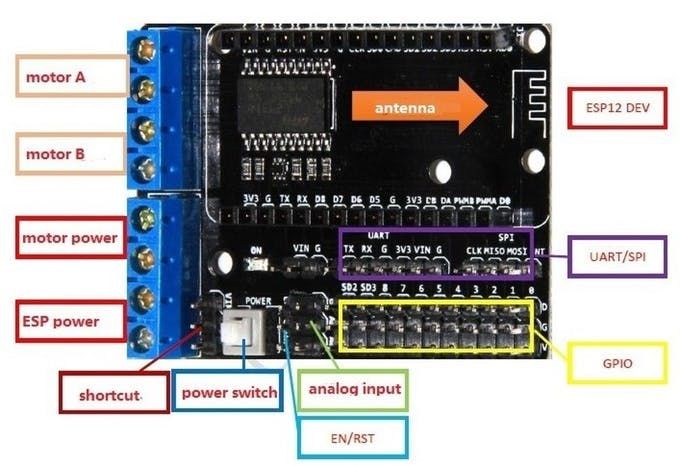 e depois de
e depois de alguns dias de um breve estudo da documentação , ficou claro como controlar os motores:from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
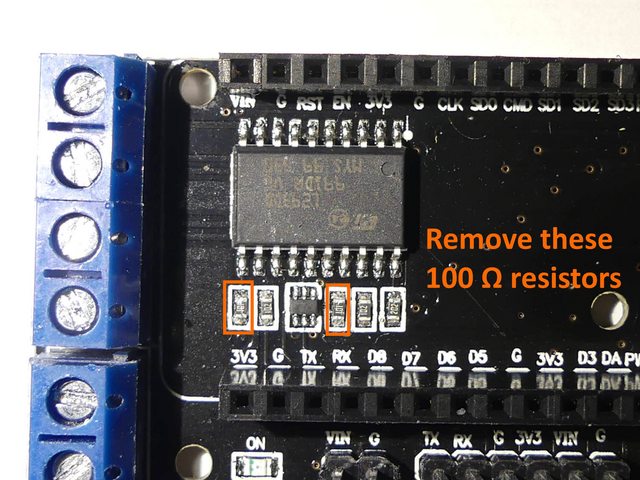
Assim, o pino 5 e o pino 4 - permitem definir a velocidade de rotação dos motores através do PWM, e o pino 0 e o pino 2 - controlam o inverso para as saídas "A" e "B", respectivamente. Além disso, como o LED também está conectado ao pin2 na minha placa, também observamos efeitos de luz em paralelo com o movimento :)No entanto, ele não decolou imediatamente ... OGoogle em um determinado tópico levou a um fórum em que havia uma recomendação para remover dois resistores "extras", o que foi feito. Citação de lá:Eu medi esses resistores, na entrada do L293DD, a resistência é de 1K, mas eles têm uma resistência de apenas 100 ohms ao terra. Isso significa que o sinal de entrada do controlador NodeMCU não pode alcançar o L293DD. Realmente não sei por que eles estão lá - o L293DD pode processar até 7 V na entrada e o NodeMCU fornece uma saída de 3,3 V. Removai
esses dois resistores de 100 Ohm (o primeiro e o terceiro à esquerda quando a antena está à direita) e agora Shield funciona.
 Depois disso, as coisas correram bem, e
Depois disso, as coisas correram bem, eversão final do código
import network
import socket
from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
""" function for connecting to your local WiFi network """
def do_connect():
essid = 'home_wifi'
password = '12345678'
sta_if = network.WLAN(network.STA_IF)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect(essid, password)
while not sta_if.isconnected():
pass
print('network config:', sta_if.ifconfig())
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
def web_page(request):
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
forward()
if request.find('GET /?left') > 0:
motor_state="Rotate Left"
left()
if request.find('GET /?right') > 0:
motor_state="Rotate Right"
right()
if request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
left_turn()
if request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
right_turn()
if request.find('GET /?backward') > 0:
motor_state="Going Backward"
backward()
if request.find('GET /?stop') > 0:
motor_state="Stopped"
stop_all()
html = """<html><head><title>RoboTank WEB</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="data:,"> <style>
html{font-family: Helvetica; display:inline-block; margin: 0px auto; text-align: center;}
h1{color: #0F3376; padding: 2vh;}p{font-size: 1.5rem;}
.button{display: inline-block; background-color: #33c080; border: none;
border-radius: 4px; color: white; text-decoration: none; font-size: 30px; width:100%}
.button2{background-color: #4286f4; width:30%}
.button3{background-color: #eb2b10; width:35%}
.button4{background-color: #8386f4; width:44%}
</style></head>
<body> <h1>RoboTank WEB</h1>
<p>Status : <strong>""" + motor_state + """</strong></p>
<p><a href='/?forward'><button class="button">Forward</button></a></p>
<p><a href='/?left_turn'><button class="button button2">LEFT</button></a>
<a href='/?stop'><button class="button button3">STOP</button></a>
<a href='/?right_turn'><button class="button button2">RIGHT</button></a>
<p><a href='/?backward'><button class="button">Backward</button></a></p>
<p><a href='/?left'><button class="button button4">L-rotate</button></a>
<a href='/?right'><button class="button button4">R-rotate</button></a></p>
</body></html>"""
return html
stop_all()
do_connect()
addr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]
s = socket.socket()
try:
s.bind(addr)
s.listen(1)
except:
s.close()
s.bind(addr)
s.listen(1)
while True:
conn, addr = s.accept()
print('Got a connection from %s' % str(addr))
request = conn.recv(1024)
request = str(request)
print('The Content = %s' % request)
response = web_page(request)
conn.send('HTTP/1.1 200 OK\n')
conn.send('Content-Type: text/html\n')
conn.send('Connection: close\n\n')
conn.sendall(response)
conn.close()
Acabou sendo bastante eficiente e resolveu com êxito a tarefa definida no primeiro estágio.O primeiro pokatushki:A primeira parte (Instalando o micropython no ESP8266 e trabalhando com ele no Linux)A próxima parte (Robô simples no MK esp8266 com micropython)Fontes de inspiração:funprojects.blog/2019/02/12/micropython-air-boatwww.instructables.com/id / Simplest-Wifi-Car-Using-ESP8266-Motorshieldforum.micropython.org/viewtopic.php?t=3977randomnerdtutorials.com/esp32-esp8266-micropython-web-serverdocs.micropython.org/en/latest/esp8266/ tutorial / index.html