Continuação do projeto para substituir o sistema de mídia Toyota Prius.Neste artigo - PHY, Transporte e entrega de pacotes ao dispositivo host, que finalmente pôde ser verificado na cabeça nativa real do Prius.Rapidamente o conto de fadas afeta, mas não rapidamente a coisa é feita. Hoje continuo o projeto prolongado de redesenho do sistema de mídia em Prius, que começou há 2 anos.Offtopic Histórico— USB-AVC , . , , .. ++ — , .
, , , , .
, , , PHY- .
Então, desde o começo. Procurando na Internet por adaptadores para AVC-LAN, muitas vezes vi soluções semelhantes a essa . E na discussão, esses comentários costumam aparecer:Honestamente, não funciona muito bem, ou melhor, não funciona bem com todas as cabeças.
Enquanto o pneu é perfeitamente legível em um rádio antigo com um Spacio de 99 anos.
Inicialmente, opus-me fundamentalmente a fazer alguma coisa, e soluções com instabilidade estrutural não me agradam.Vamos repetir o caminho da engenharia reversa do pneu. Vai.Primeiro de tudo, nos conectamos ao ônibus em um carro ao vivo e removemos a forma de onda: o início do pacote.
o início do pacote.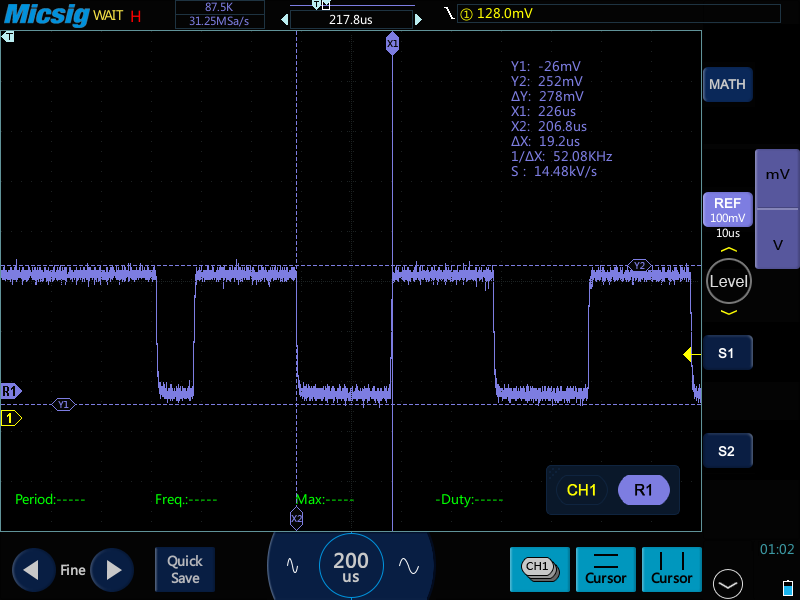 Os bits estão em algum lugar no meio, maiores.
Os bits estão em algum lugar no meio, maiores. Algo muito semelhante ao ACK.Um pouco mais sobre esse estranho passo - abaixo.Eu já fiz capturas de tela das formas de onda a partir dos dados armazenados, enquanto os capturava, não prestei atenção imediata à faixa de tensão em que obtive os dados. E quando ele desenhou, ele teve que descer no carro novamente para se certificar de que não havia sobrevivido da mente. Sim, a extensão do barramento diferencial é de apenas 200mV (!!!).Em seguida, vamos à folha de dados usada pelos colegas ST485 e vemos o seguinte:
Algo muito semelhante ao ACK.Um pouco mais sobre esse estranho passo - abaixo.Eu já fiz capturas de tela das formas de onda a partir dos dados armazenados, enquanto os capturava, não prestei atenção imediata à faixa de tensão em que obtive os dados. E quando ele desenhou, ele teve que descer no carro novamente para se certificar de que não havia sobrevivido da mente. Sim, a extensão do barramento diferencial é de apenas 200mV (!!!).Em seguida, vamos à folha de dados usada pelos colegas ST485 e vemos o seguinte: Aqui, de fato, foi encontrada a raiz de todos os problemas, por causa dos quais temos que brincar com resistores e orar aos deuses da resina para que o conversor funcione em uma máquina específica. Trabalhar próximo dos limites é mau. Mas ainda mais interessante é que, para a AVC-LAN, que em sua física é um clone de algum barramento IE da NEC, de acordo com sua especificação (o link será um pouco mais distante), o estado ativo é uma tensão acima de 120mV, enquanto o ST485 tem o direito de considerar qualquer coisa menor que 200mV é zero. Bem, isto é, se, devido a desvios de fabricação, o ST485 tiver um nível de limiar um pouco mais baixo e aparecer no barramento uma margem um pouco acima da norma (até 6 volts é permitido), é claro que o ST485 poderá receber esse sinal. E essas imprecisões de fabricação são a única coisa que às vezes força os dispositivos com ST485 na composiçãotrabalhos. Obviamente, não colocaremos tanta felicidade no desenvolvimento.A segunda solução disponível, baseada no mesmo ST485 e em um amplificador operacional, não gostei da abundância de componentes. Bem, no século 21 nós vivemos, afinal.Solução:Existem conversores especiais para AVC-LAN. Mas não consegui obtê-los a um preço acessível para este dispositivo. A China fraterna voltou a resgatar, onde o HA12240FP foi descoberto , o que tem uma diferença de voltagem para a percepção de um registro. "1" pela folha de dados é 80..110 mV. Isso permitirá que nosso pneu defina um nível ativo com uma margem quase dupla. Arranjos.Nós criamos o esquema no STM32F103 mencionado na primeira parte:
Aqui, de fato, foi encontrada a raiz de todos os problemas, por causa dos quais temos que brincar com resistores e orar aos deuses da resina para que o conversor funcione em uma máquina específica. Trabalhar próximo dos limites é mau. Mas ainda mais interessante é que, para a AVC-LAN, que em sua física é um clone de algum barramento IE da NEC, de acordo com sua especificação (o link será um pouco mais distante), o estado ativo é uma tensão acima de 120mV, enquanto o ST485 tem o direito de considerar qualquer coisa menor que 200mV é zero. Bem, isto é, se, devido a desvios de fabricação, o ST485 tiver um nível de limiar um pouco mais baixo e aparecer no barramento uma margem um pouco acima da norma (até 6 volts é permitido), é claro que o ST485 poderá receber esse sinal. E essas imprecisões de fabricação são a única coisa que às vezes força os dispositivos com ST485 na composiçãotrabalhos. Obviamente, não colocaremos tanta felicidade no desenvolvimento.A segunda solução disponível, baseada no mesmo ST485 e em um amplificador operacional, não gostei da abundância de componentes. Bem, no século 21 nós vivemos, afinal.Solução:Existem conversores especiais para AVC-LAN. Mas não consegui obtê-los a um preço acessível para este dispositivo. A China fraterna voltou a resgatar, onde o HA12240FP foi descoberto , o que tem uma diferença de voltagem para a percepção de um registro. "1" pela folha de dados é 80..110 mV. Isso permitirá que nosso pneu defina um nível ativo com uma margem quase dupla. Arranjos.Nós criamos o esquema no STM32F103 mencionado na primeira parte: UPD: O esquema nasceu às pressas, contém um erro. Os motoristas de ônibus devem ser alimentados a partir de 5V. Nesse caso, como no diagrama, seu diferencial aumenta. limite, e nem todos os pacotes são aceitos.Tudo é simples para o primitivismo, eu acho, não precisa de uma descrição. Exceto, talvez, o fato de a escolha das pernas para o RX1 / 2 não ser acidental, e a primeira versão do circuito exigir "refinamento de arquivo" para obter sinais para as entradas de captura / comparação, porque eu quero usá-lo para medir o comprimento do pulso. Soluções alternativas - pesquisas e interrupção na mudança de estado perdem a precisão e a complexidade da implementação do software. Além disso - eu gostaria de receber pelo menos duas linhas em paralelo (há três na cabeça) e, se as frentes coincidirem em duas, você pode dizer adeus à ideia de uma precisão aceitável se você não usar captura / comparação.Uma análise mais aprofundada dos dados no pacote está bem escrita aqui . Mas, como os links são inconsistentes, repetirei brevemente aqui:
UPD: O esquema nasceu às pressas, contém um erro. Os motoristas de ônibus devem ser alimentados a partir de 5V. Nesse caso, como no diagrama, seu diferencial aumenta. limite, e nem todos os pacotes são aceitos.Tudo é simples para o primitivismo, eu acho, não precisa de uma descrição. Exceto, talvez, o fato de a escolha das pernas para o RX1 / 2 não ser acidental, e a primeira versão do circuito exigir "refinamento de arquivo" para obter sinais para as entradas de captura / comparação, porque eu quero usá-lo para medir o comprimento do pulso. Soluções alternativas - pesquisas e interrupção na mudança de estado perdem a precisão e a complexidade da implementação do software. Além disso - eu gostaria de receber pelo menos duas linhas em paralelo (há três na cabeça) e, se as frentes coincidirem em duas, você pode dizer adeus à ideia de uma precisão aceitável se você não usar captura / comparação.Uma análise mais aprofundada dos dados no pacote está bem escrita aqui . Mas, como os links são inconsistentes, repetirei brevemente aqui:- O barramento diferencial, aqui eles escrevem sobre a interpretação dos níveis do log. "1" a <20mV, log. "0" -> 110mV.
- O comprimento do bit é de 40 µs, os primeiros 20 µs são sempre "0", os últimos 7 µs são sempre "1", no meio está o valor do bit.

Bem, o semáforo:
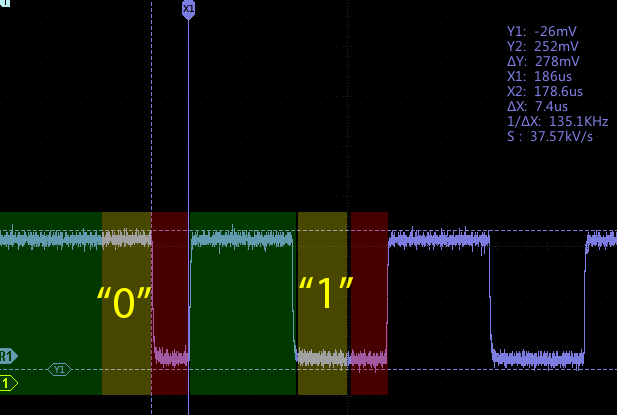
- Bit inicial - maior que 180 μs
- (ACK). «», - :

ACK- , Dallas 1-wire, , , , . , . 1 , «0» ( , ), .2 , , , . .3 , (1), , , 7 , . «1».
Bem ... descobrimos o nível físico, desenhamos o circuito e separamos o quadro. Aconteceu algo assim: a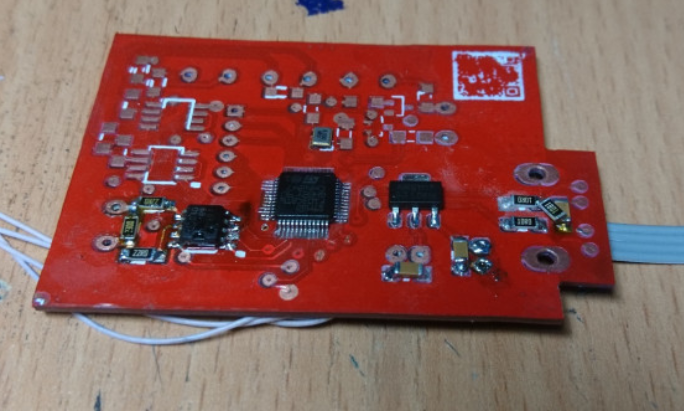
 placa de circuito impresso saiu um pouco sem sucesso, e não porque o código QR não funcionou na impressão serigráfica. Há um erro no circuito (no diagrama acima, eu já o corrigi) em relação à seleção de pernas para o RX, e três drivers de linha são divorciados. No processo de escrever e depurar o programa, percebi que seria bom se você pudesse executar pelo menos dois constantemente. Sim, e mais não é necessário.Bem ... o dispositivo acabou sendo simples e eficaz, enquanto o problema construtivo com a incompatibilidade de níveis foi resolvido.Mais adiante no programa:
placa de circuito impresso saiu um pouco sem sucesso, e não porque o código QR não funcionou na impressão serigráfica. Há um erro no circuito (no diagrama acima, eu já o corrigi) em relação à seleção de pernas para o RX, e três drivers de linha são divorciados. No processo de escrever e depurar o programa, percebi que seria bom se você pudesse executar pelo menos dois constantemente. Sim, e mais não é necessário.Bem ... o dispositivo acabou sendo simples e eficaz, enquanto o problema construtivo com a incompatibilidade de níveis foi resolvido.Mais adiante no programa:- . , . : * USB — , , «» . . * , 8, 6- , 4.4 . , , .
- Monitor Android para reversão completa da lógica do barramento. Se alguém é forte no Android e Kotlin, ficarei grato pela oportunidade de consultar. Estas são tentativas tímidas de dominar tudo de uma vez, portanto, não entre no repositório por referência sem uma nova passagem :)
UPD: temporais fixa s e dados em vez microssegundos foram ms.