 Ao desenvolver dispositivos nos quais é necessário avaliar os ângulos de orientação, pode surgir a pergunta - qual sensor MEMS escolher. Os fabricantes de sensores fornecem muitos parâmetros dos quais precisamos obter informações úteis sobre a qualidade do sensor.Para entender com que precisão de ângulo podemos confiar, você precisa fazer um certo esforço.TL; DR : É descrito um pequeno script para Octave / MATLAB, que permite estimar erros no cálculo dos ângulos de orientação a partir das medições MEMS de acelerômetros e magnetômetros. Na entrada do script - parâmetros dos sensores das folhas de dados (e / ou erros de calibração). O artigo pode ser útil para quem começa a usar sensores inerciais em seus dispositivos. Um pequeno programa educacional sobre os sensores está incluído. Link para o github também.Aceitamos imediatamente as seguintes condições:
Ao desenvolver dispositivos nos quais é necessário avaliar os ângulos de orientação, pode surgir a pergunta - qual sensor MEMS escolher. Os fabricantes de sensores fornecem muitos parâmetros dos quais precisamos obter informações úteis sobre a qualidade do sensor.Para entender com que precisão de ângulo podemos confiar, você precisa fazer um certo esforço.TL; DR : É descrito um pequeno script para Octave / MATLAB, que permite estimar erros no cálculo dos ângulos de orientação a partir das medições MEMS de acelerômetros e magnetômetros. Na entrada do script - parâmetros dos sensores das folhas de dados (e / ou erros de calibração). O artigo pode ser útil para quem começa a usar sensores inerciais em seus dispositivos. Um pequeno programa educacional sobre os sensores está incluído. Link para o github também.Aceitamos imediatamente as seguintes condições:- Queremos avaliar os ângulos de orientação de um dispositivo estacionário.
- Para estimar ângulos, usaremos medições MEMS de acelerômetros e magnetômetros.
1. Breve programa educacional
Ângulos de orientação
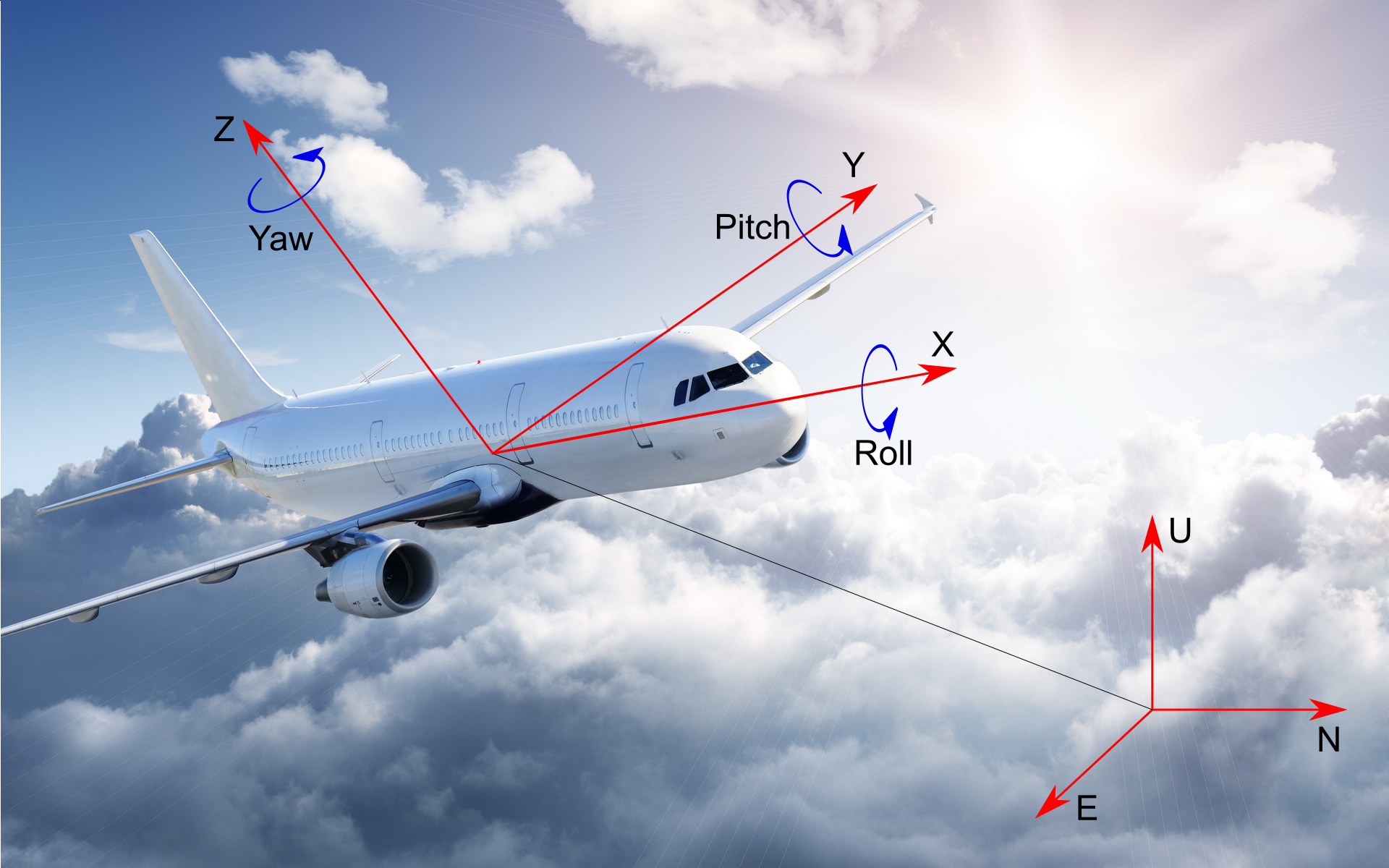 Entenderemos os ângulos de orientação do objeto como os ângulos de Euler - rotação, inclinação, guinada, que conectam o sistema de coordenadas XYZ do próprio objeto e o sistema de coordenadas local leste-norte-topo local (ENU - East North Up). Os ângulos de rotação, inclinação e guinada indicam a rotação que os eixos XYZ precisam fazer para se mover no eixo ENU. Assim, ângulos zero significam que o eixo X do objeto está voltado para o leste, o eixo Y do objeto está voltado para o norte e o eixo Z está para cima.A ordem de rotação dos eixos é do último ângulo: primeiro na guinada (em torno do eixo Z), depois no passo (em torno do eixo Y), depois no rolamento (em torno do eixo X).
Entenderemos os ângulos de orientação do objeto como os ângulos de Euler - rotação, inclinação, guinada, que conectam o sistema de coordenadas XYZ do próprio objeto e o sistema de coordenadas local leste-norte-topo local (ENU - East North Up). Os ângulos de rotação, inclinação e guinada indicam a rotação que os eixos XYZ precisam fazer para se mover no eixo ENU. Assim, ângulos zero significam que o eixo X do objeto está voltado para o leste, o eixo Y do objeto está voltado para o norte e o eixo Z está para cima.A ordem de rotação dos eixos é do último ângulo: primeiro na guinada (em torno do eixo Z), depois no passo (em torno do eixo Y), depois no rolamento (em torno do eixo X).Acelerômetro
Este é um sensor que mede a projeção de aceleração aparente no eixo de sensibilidade. Parece - porque mede a gravidade também, mesmo enquanto o acelerômetro está parado. É mais fácil imaginar um acelerômetro como um peso em uma mola; suas medições emitidas são proporcionais ao grau de tensão da mola. Se o acelerômetro estiver parado, a mola será esticada apenas pela gravidade. Se acelerar, haverá uma soma de forças: inércia do peso e gravidade Aceitamos o seguinte modelo de medidas da tríade de acelerômetros ortogonais (mutuamente perpendiculares):
Onde - aceleração medida no SSC (sistema de coordenadas próprias) XYZ, - matriz de inclinação dos eixos e fatores de escala do acelerômetro, É o vetor da verdadeira aceleração no CCK XYZ, É o vetor de deslocamento zero do acelerômetro, - ruído de medição.A matriz de inclinação dos eixos e fatores de escala é a seguinte:
onde os elementos estão localizados na diagonal principal () São os fatores de escala e seus erros ao longo dos três eixos do acelerômetro, e os elementos restantes da matriz são as distorções dos eixos do acelerômetro.Seleção de acelerômetro da folha de dadosMPU-9250
- — Zero-G Initial Calibration Tolerance ( , ) —
- — Initial Tolerance () — . ,
- — Cross Axis Sensitivity () —
- — Noise Power Spectral Density —
- — Low Pass Filter Response — , . . ;
:
ADIS16488A:
- — Bias Repeatability () —
- — (Sensitivity) Repeatability () — ;
- — Misalignment Axis to frame () — , (, );
- — Noise Density —
- — — , MPU-9250;
Magnetômetro
Um sensor que mede a projeção da indução de campo magnético no eixo de sensibilidade. O magnetômetro é caracterizado por distorções do ferro duro e do ferro macio. A distorção do ferro duro é um efeito aditivo quando um componente constante é adicionado ao campo medido. O motivo pode ser, por exemplo, a ação de um ímã permanente ou um deslocamento de zero do sensor. A distorção de ferro macio é um efeito multiplicador que reflete uma mudança na direção e / ou atenuação do vetor de indução magnética. Esse efeito pode ser causado pela presença de um objeto metálico nas imediações do magnetômetro ou por distorções do próprio sensor - um erro no fator de escala ou uma distorção do seu eixo de sensibilidade.Aceitamos o modelo de medição da tríade de magnetômetros:
Onde - medições do magnetômetro em CCK XYZ, - matriz de inclinação diagonal dos eixos e fatores de escala (que descreve o efeito do ferro macio), É o vetor da verdadeira indução magnética no SSK, - deslocamento dos zeros do magnetômetro (descreve o efeito do ferro duro), - ruído de medição.A matriz do eixo de inclinação e os fatores de escala do magnetômetro:
elementos localizados na diagonal principal () São os fatores de escala e seus erros ao longo dos três eixos do magnetômetro, os elementos restantes da matriz são as distorções dos eixos do magnetômetro. Todos os elementos da matriz também levam em consideração o efeito do ferro macio.Escolha dos parâmetros do magnetômetro a partir de uma folha de dadosMPU-9250
, , :
- —
- —
- — , , —
- —
ADIS16488A
- — Initial Bias Error — , ;
- — Initial Sensitivity Tolerance
- — Misalignment Axis to axis — , (, );
- — Noise Density —
- —
Cálculo dos ângulos de orientação
Devido à presença de gravidade na Terra, os acelerômetros “detectam” a direção descendente. Suas medidas são usadas para calcular ângulos de rotação e inclinação. As fórmulas para cálculo podem ser encontradas aqui . O terceiro é o ângulo de guinada (e, neste caso, o azimute magnético), pode ser determinado devido à presença do campo magnético da Terra. O vetor de indução do campo magnético é medido por magnetômetros e suas medições estão envolvidas no cálculo do ângulo de guinada. Deve-se notar que, no cálculo do azimute magnético, são utilizadas medidas do magnetômetro, calculadas no plano. Aqui você pode encontrar a fórmula para calcular o azimute magnético.
Onde - função tangente de arco completo, , , - medição do acelerômetro ao longo de três eixos no CCK, , - medições do magnetômetro ao longo dos eixos X ', Y' (as medições dos magnetômetros são contadas no plano).2.

- roll, pitch, yaw. .
- roll, pitch, yaw XYZ ENU:
, , , , , . - :
— , , g, — ( ). - :
- () :
- «» , rpy2mat:
roll' pitch' — , , — . - ENU XYZ:
- :
- «»:
- «» c :
- roll, pitch, yaw — roll', pitch', yaw'.
3. —
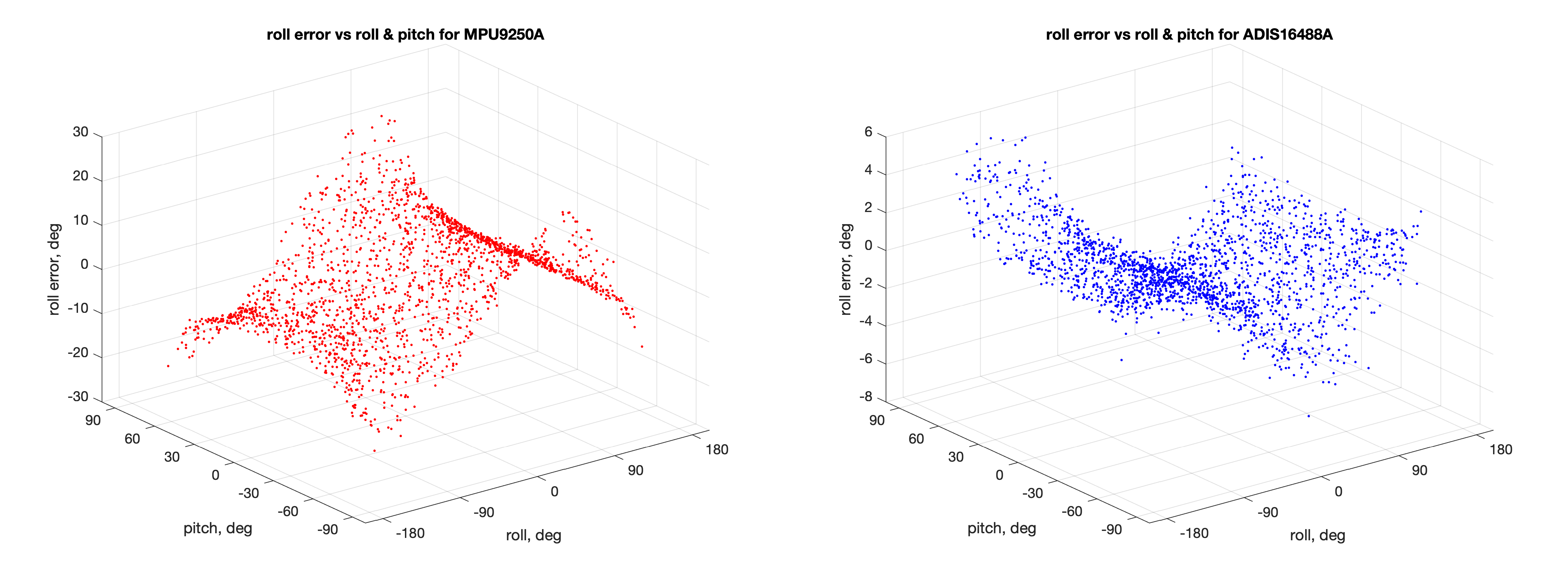
Para dois sensores, que tomamos como exemplo - ADIS16488A e MPU-9250, os erros marginais na estimativa dos ângulos de orientação foram obtidos sob a influência combinada dos erros do acelerômetro e magnetômetro.A tabela abaixo mostra os valores máximos de erros recebidos:O efeito combinado dos erros do acelerômetro e magnetômetro nos erros de estimativa dos ângulos de orientação:- É assim que os erros de estimativa de rotação são exibidos, dependendo dos valores de rotação e inclinação:
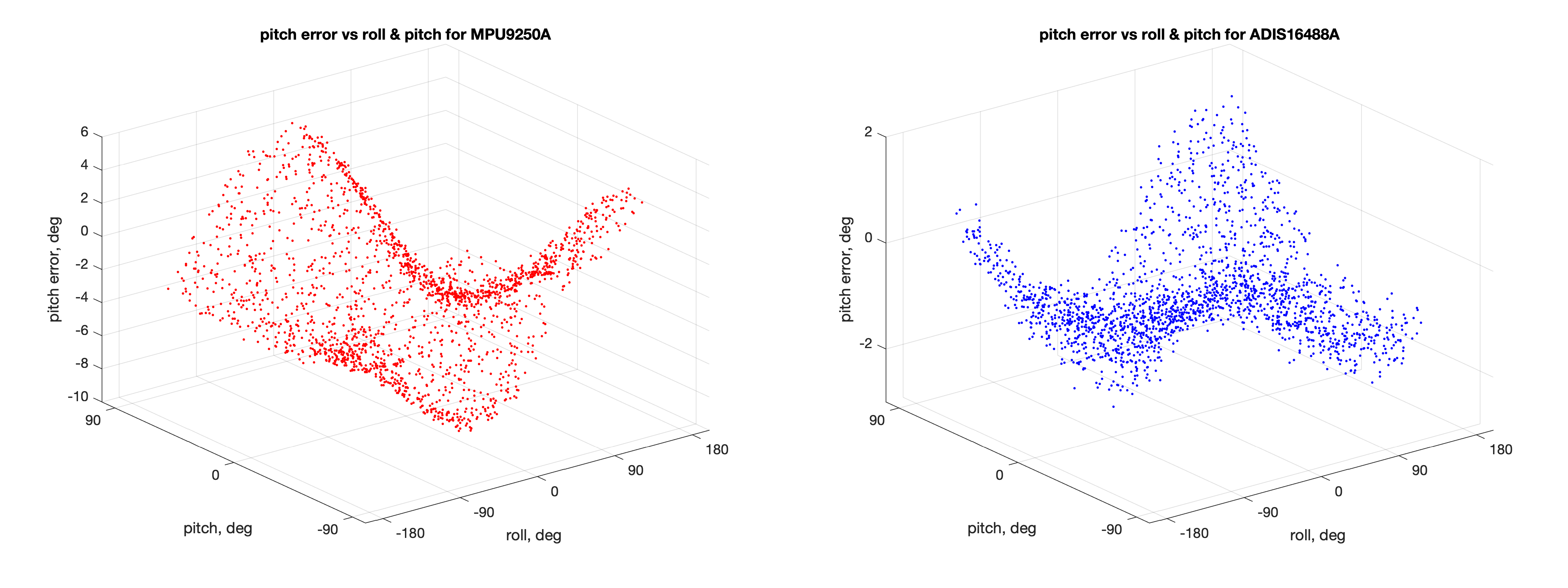
- Erros de estimativa de inclinação, dependendo dos valores de rotação e inclinação:
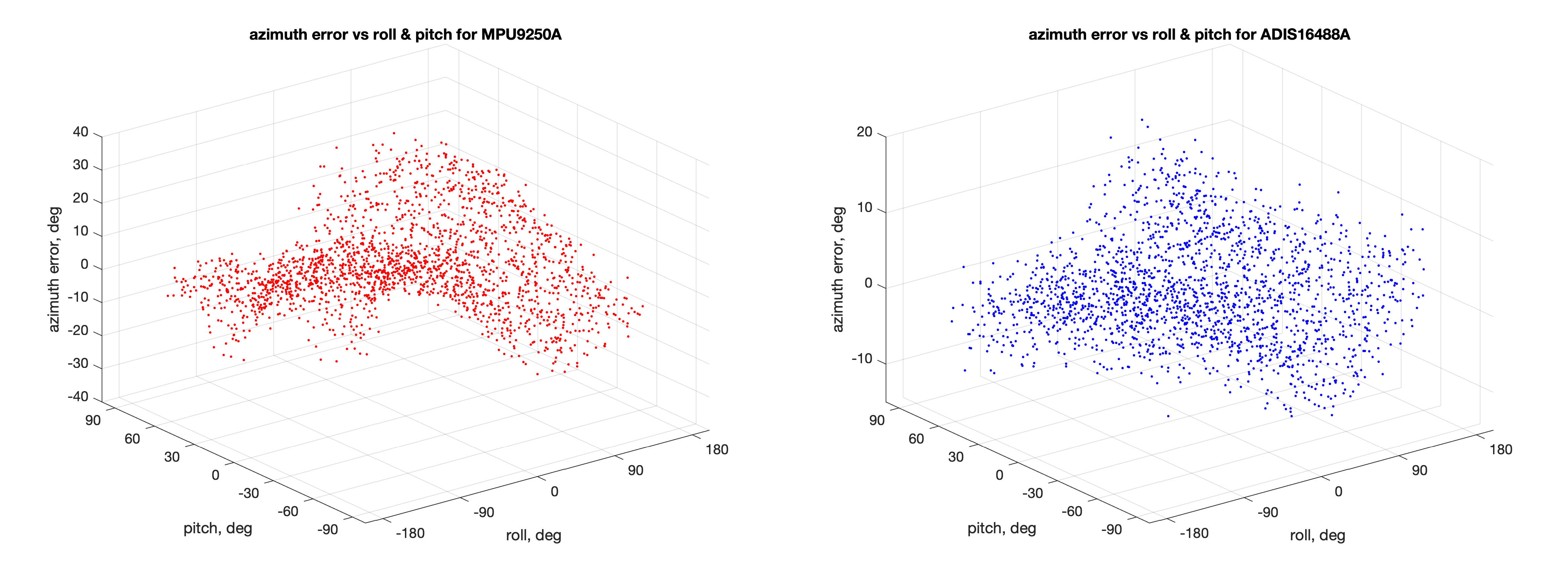
- Erros na estimativa do azimute magnético a partir dos ângulos de rotação e inclinação:
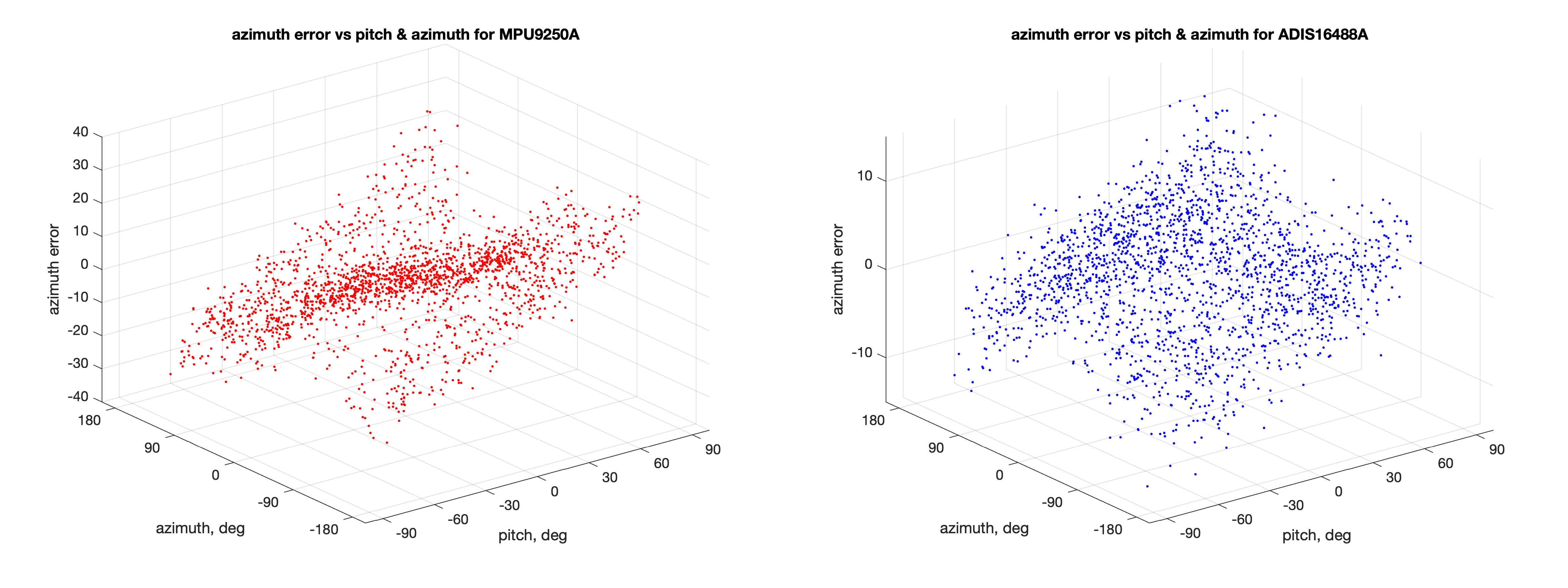
- Erros de estimativa do azimute magnético a partir dos ângulos de rotação e do azimute magnético:

- :
- .
?.
Z (
) , (
). ( ). (
). , .
Autores
Instituto de Engenharia de Potência de Moscou, Departamento de Sistemas de Engenharia de Rádio