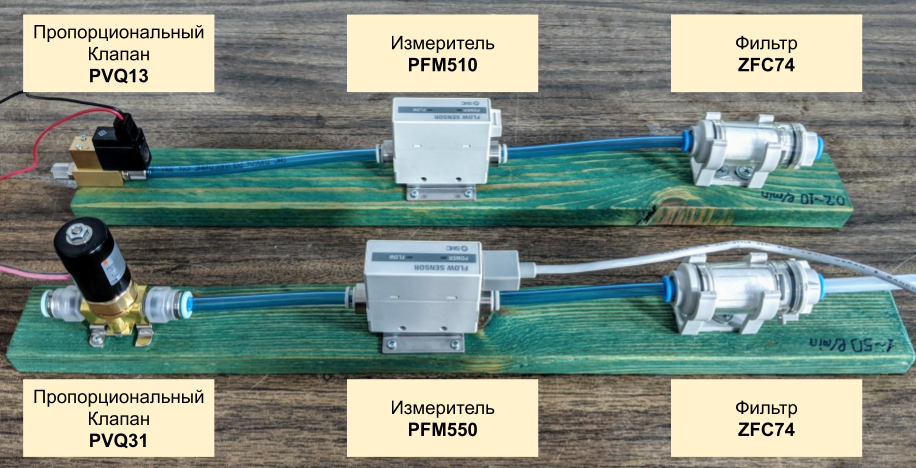
 Os controladores de fluxo de gás (RRG) são projetados para manter uma taxa de fluxo definida pelo usuário. Os RWGs são usados em laboratórios da indústria e de pesquisa para organizar o fornecimento de gás de cilindros e rodovias. Os aparelhos Eltochpribor, MKS, Bronkhorst, etc. estão representados no mercado e o custo desses aparelhos é de 1000 a 2500 USD. O objetivo deste trabalho é criar um regulador de fluxo de gás a partir de componentes mais acessíveis. A idéia é organizar um sistema de feedback que inclua uma válvula proporcional e um medidor de vazão. Abaixo está uma breve descrição do hardware e software do sistema, que permite reproduzi-lo para todos que usam o RRG em suas atividades. Todos os códigos-fonte estão disponíveis no GitHub .Utilizamos produtos SMC, válvulas da série PVQ e medidores de vazão da série PFM5 sem indicação. Dois RWGs foram montados com faixas de fluxo ajustáveis de 0,2-5 L / min (PVQ13 + PFM510) e 1-50 L / min (PVQ31 + PFM550), mostradas na figura. O custo de um regulador de fluxo pode ser estimado acima de 100 USD (válvula PVQ31) + 80 USD (medidor PFM5) + 20 USD (microcontrolador Arduino Nano, fonte de alimentação e componentes de rádio) = 200 USD. Tudo descrito abaixo se aplica ao RWG 1-50 l / min. A criação de um regulador de 0,2 a 5 l / min, bem como de outros reguladores de componentes similares, segue o mesmo esquema, mas pode diferir em pequenos detalhes.
Os controladores de fluxo de gás (RRG) são projetados para manter uma taxa de fluxo definida pelo usuário. Os RWGs são usados em laboratórios da indústria e de pesquisa para organizar o fornecimento de gás de cilindros e rodovias. Os aparelhos Eltochpribor, MKS, Bronkhorst, etc. estão representados no mercado e o custo desses aparelhos é de 1000 a 2500 USD. O objetivo deste trabalho é criar um regulador de fluxo de gás a partir de componentes mais acessíveis. A idéia é organizar um sistema de feedback que inclua uma válvula proporcional e um medidor de vazão. Abaixo está uma breve descrição do hardware e software do sistema, que permite reproduzi-lo para todos que usam o RRG em suas atividades. Todos os códigos-fonte estão disponíveis no GitHub .Utilizamos produtos SMC, válvulas da série PVQ e medidores de vazão da série PFM5 sem indicação. Dois RWGs foram montados com faixas de fluxo ajustáveis de 0,2-5 L / min (PVQ13 + PFM510) e 1-50 L / min (PVQ31 + PFM550), mostradas na figura. O custo de um regulador de fluxo pode ser estimado acima de 100 USD (válvula PVQ31) + 80 USD (medidor PFM5) + 20 USD (microcontrolador Arduino Nano, fonte de alimentação e componentes de rádio) = 200 USD. Tudo descrito abaixo se aplica ao RWG 1-50 l / min. A criação de um regulador de 0,2 a 5 l / min, bem como de outros reguladores de componentes similares, segue o mesmo esquema, mas pode diferir em pequenos detalhes.Hardware
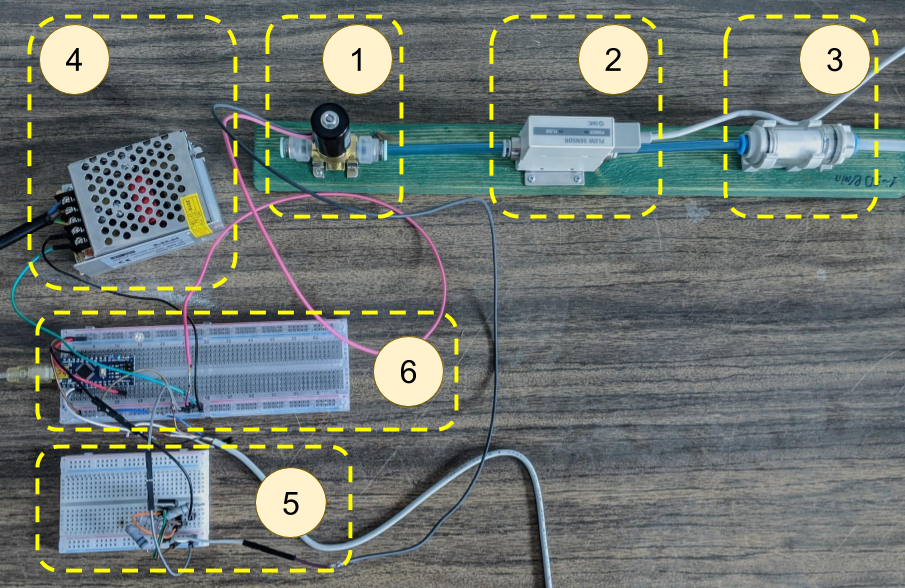 O hardware é mostrado na figura e consiste em:
O hardware é mostrado na figura e consiste em:- Válvula Proporcional PVQ31
- Medidor de vazão PFM550
- Filtro
- Fonte de alimentação (24V, 1A)
- Circuitos de controle de corrente
- Microcontrolador Arduino Nano e seus esquemas de energia
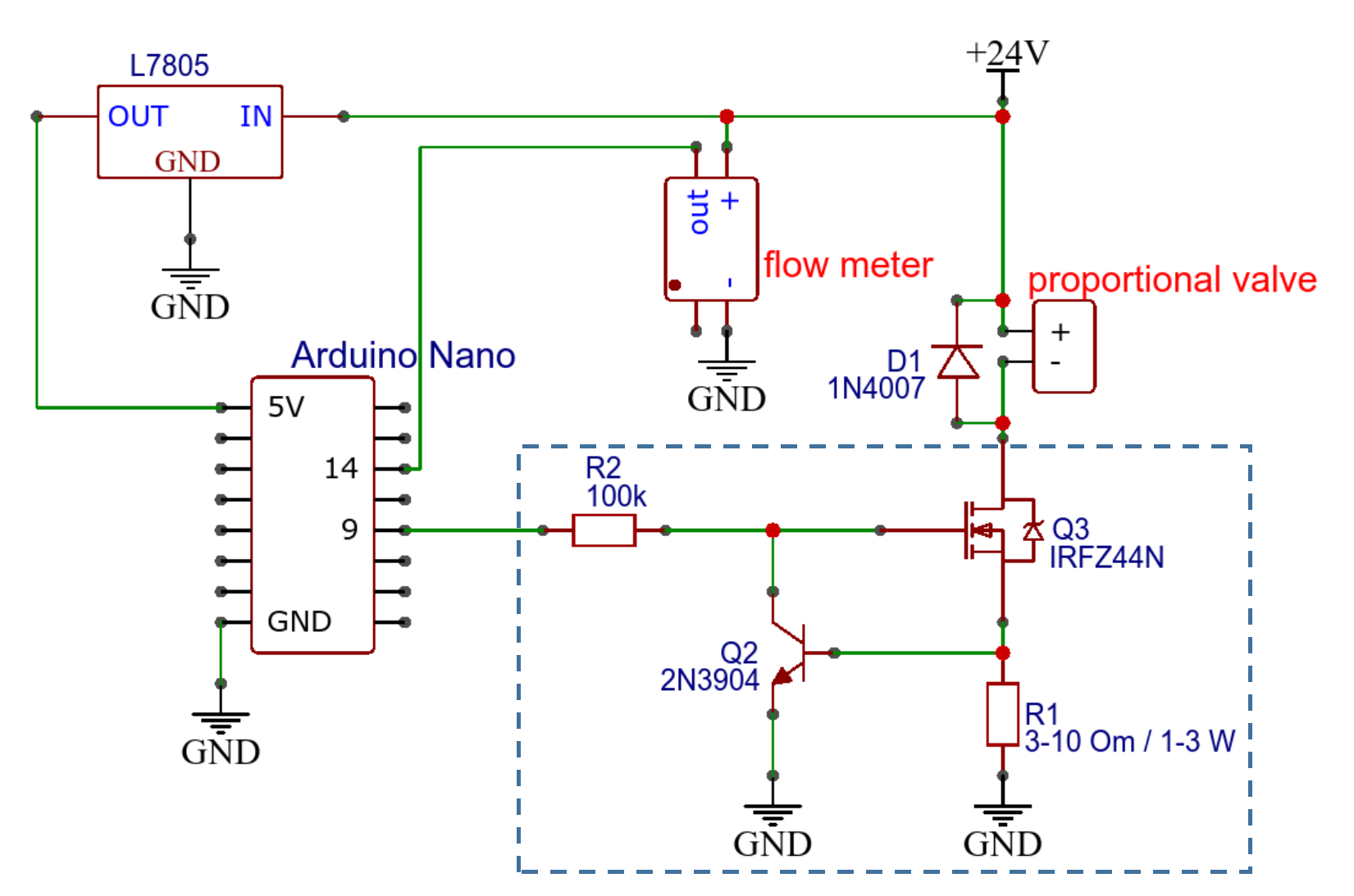 O diagrama de conexão elétrica dos componentes é mostrado na figura. Para alimentar o circuito, é usada uma fonte CC de 24 V, 1 A, o que é mais do que suficiente, dado o consumo da válvula inferior a 200 mA e um medidor inferior a 35 mA. As válvulas proporcionais da série PVQ são controladas por corrente. De acordo com a documentação, não é recomendável controlá-los por controle de tensão. O controle de corrente pode ser implementado usando o circuito discutido aqui , aqui e com mais detalhes aqui . O circuito de controle de corrente é destacado no circuito elétrico geral (Fig. 3) por um retângulo tracejado. As válvulas da série PVQ são conectadas por dois fios de energia: vermelho - DC +, preto - DC-.A força da corrente é regulada usando o sinal PWM produzido pelo pino analógico do microcontrolador. Por padrão, os controladores baseados em ATmega328 (Arduino UNO / Nano / Pro Mini) geram um sinal PWM de 8 bits (0-255) a uma frequência de 488 ou 976 Hz, dependendo do pino. A baixa largura do sinal PWM reduz a precisão do controle da válvula. Baixa frequência leva ao seu burburinho. Esses valores podem ser aumentados programaticamente para 10 bits (0-1023) e 15,6 kHz, respectivamente. Usamos uma frequência de 7,8 kHz. Uma descrição dos comandos que precisam ser inseridos na função de
O diagrama de conexão elétrica dos componentes é mostrado na figura. Para alimentar o circuito, é usada uma fonte CC de 24 V, 1 A, o que é mais do que suficiente, dado o consumo da válvula inferior a 200 mA e um medidor inferior a 35 mA. As válvulas proporcionais da série PVQ são controladas por corrente. De acordo com a documentação, não é recomendável controlá-los por controle de tensão. O controle de corrente pode ser implementado usando o circuito discutido aqui , aqui e com mais detalhes aqui . O circuito de controle de corrente é destacado no circuito elétrico geral (Fig. 3) por um retângulo tracejado. As válvulas da série PVQ são conectadas por dois fios de energia: vermelho - DC +, preto - DC-.A força da corrente é regulada usando o sinal PWM produzido pelo pino analógico do microcontrolador. Por padrão, os controladores baseados em ATmega328 (Arduino UNO / Nano / Pro Mini) geram um sinal PWM de 8 bits (0-255) a uma frequência de 488 ou 976 Hz, dependendo do pino. A baixa largura do sinal PWM reduz a precisão do controle da válvula. Baixa frequência leva ao seu burburinho. Esses valores podem ser aumentados programaticamente para 10 bits (0-1023) e 15,6 kHz, respectivamente. Usamos uma frequência de 7,8 kHz. Uma descrição dos comandos que precisam ser inseridos na função de setup()firmware do Arduino é fornecida aqui e aqui .Os medidores de vazão da série PFM5 possuem 2 fios de sinal (saída analógica preta, ajuste de tempo de resposta branco (não usado)) e dois fios de alimentação (marrom - DC +, azul - DC-). Alimentado por uma fonte de 24 V. O medidor de vazão fornece um sinal analógico na faixa de 1-5 V. Um valor de 1 V corresponde ao fluxo de gás zero, 5 V - o máximo para esse medidor. De acordo com a documentação, a relação entre fluxo e tensão é linear. Enquanto isso, parece útil calibrar regularmente o medidor de vazão. O sinal analógico do medidor de fluxo (fio preto) é recebido por um pino analógico Arduino de 10 bits (0-1023) para processamento e exibição. O fio branco é projetado para definir o tempo de resposta, não o usamos. Nesse caso, o tempo de resposta é de 50 ms.A placa do Arduino deve ser alimentada por um pino de 5V, a tensão de alimentação não deve exceder 5,5 V. Essa energia pode ser fornecida a partir da PSU da válvula e do medidor de vazão através do estabilizador L7805, conforme mostrado no diagrama (Fig. 3). Provavelmente você precisará de um radiador no estabilizador. A energia da porta USB do computador usado durante o teste (Fig. 2) não é desejável, pois nesse caso a tensão de referência é instável ao usar o ADC. Para mais informações sobre a potência da placa, consulte aqui .Parte dosoftware A parte do software consiste no firmware do microcontrolador Arduino Nano e em uma interface gráfica do usuário que roda em um PC.O programa baixado para o microcontrolador executa ciclicamente as seguintes ações:- ,
- ,
- , -
O sistema pode operar no modo manual e automático. Durante a operação manual, o valor da abertura da válvula desejada, expressa por uma variável valve(0 <= valve<1023), deve ser enviada para a porta serial . O valor dessa variável determina a ocupação do sinal PWM, que é enviado pela saída analógica do microcontrolador para o circuito de controle de corrente e o comando proporcional da válvula analogWrite(valvepin, valve). Após a abertura, a válvula permanece na posição definida até que um novo comando seja recebido via porta serial.Para mudar para a operação automática, um número negativo deve ser enviado para a porta serial -targetflow. Valor variáveltargetflowestá na faixa de 0 a 1023 e determina a taxa de fluxo de gás que deve ser mantida. A vazão real do gás é determinada pelas leituras do medidor de vazão, que são lidas na entrada analógica do microcontrolador com um comando realflow = analogRead(fmpin)(0 <= realflow<1023). No modo automático, o sistema se esforça para manter a igualdade entre targetflowe realflowcontrolando a válvula proporcional. O valor da abertura da válvula é calculado usando o controlador de diferenciação integral integral (PID). Você pode ler sobre o controlador PID aqui , aqui e aqui . A biblioteca GyverPID é usada para implementar o controlador .com algumas alterações e adições. Como a biblioteca foi modificada, use a biblioteca anexada a esse código e não faça o download no link acima.Para usar o controlador PID, é necessário selecionar os coeficientes dos componentes proporcional Kp, integral Kie diferencial Kd, bem como o tempo de iteração dtpid. O valor da variável dtpiddeve ser selecionado dependendo da inércia do sistema. Quanto mais inerte o sistema, mais ele deve ser dtpid. Com base nas classificações e nos resultados do teste para o dispositivo em questão, escolhemos valores dtpid= 100-330 ms. Os coeficientes Kp, Ki, Kdseleccionam-se um valor fixodtpide dependem significativamente do sistema. Recomendações sobre a seleção de coeficientes podem ser encontradas aqui , aqui e aqui .Portanto, o algoritmo executado ciclicamente pelo microcontrolador é o seguinte:if( )
inp
if(inp >= 0 && inp < 1023)
inp
if(inp <= 0 && inp >= -1023)
-inp
if( && dtpid )
-
if( dt )
A interface gráfica do usuário é escrita em Python usando a estrutura gráfica do PyQt. O design foi criado no programa Qt Designer, após o qual o código do arquivo .ui foi convertido em um arquivo Python. Para uma introdução ao desenvolvimento da GUI e ao uso do PyQt, veja aqui e aqui .A interface gráfica interage com o firmware do Arduino através da porta serial usando a biblioteca pyserial. O programa Python faz o seguinte:- , ,
- 0-1023, ,
- .3
- , ( 0-1023)
- .5
O código para conectar-se à porta serial é emprestado aqui .O módulo é destinado à transferência de unidades de usuário para o intervalo de 0 a 1023 units.py. Este módulo facilita a adição de novas unidades. O usuário deve indicar o nome das unidades e a fórmula de conversão de 0 a 1023 para as novas unidades. O módulo é fornecido com comentários detalhados.Os dados recebidos do medidor de vazão e emitidos pelo firmware do microcontrolador para a porta serial são lidos da porta pelo programa Python e, após a conversão das unidades, são exibidos em texto e forma gráfica. Uma biblioteca é usada para desenhar um gráfico do consumo atual pyqtgraph.resultados
Para começar a trabalhar com o RRG, você precisa: piscar o microcontrolador, conectar a energia, executar o programa Python, estabelecer uma conexão com a porta serial. Depois disso, o usuário pode selecionar o modo de operação (manual ou automático) e definir o valor de abertura da válvula necessário no modo de operação manual ou o valor do fluxo suportado no modo automático. A vazão atual do gás é exibida no campo correspondente e exibida no gráfico. O gráfico é atualizado ciclicamente, após atingir o número especificado de pontos, o gráfico é limpo e o desenho é iniciado novamente. O usuário pode selecionar as unidades usadas.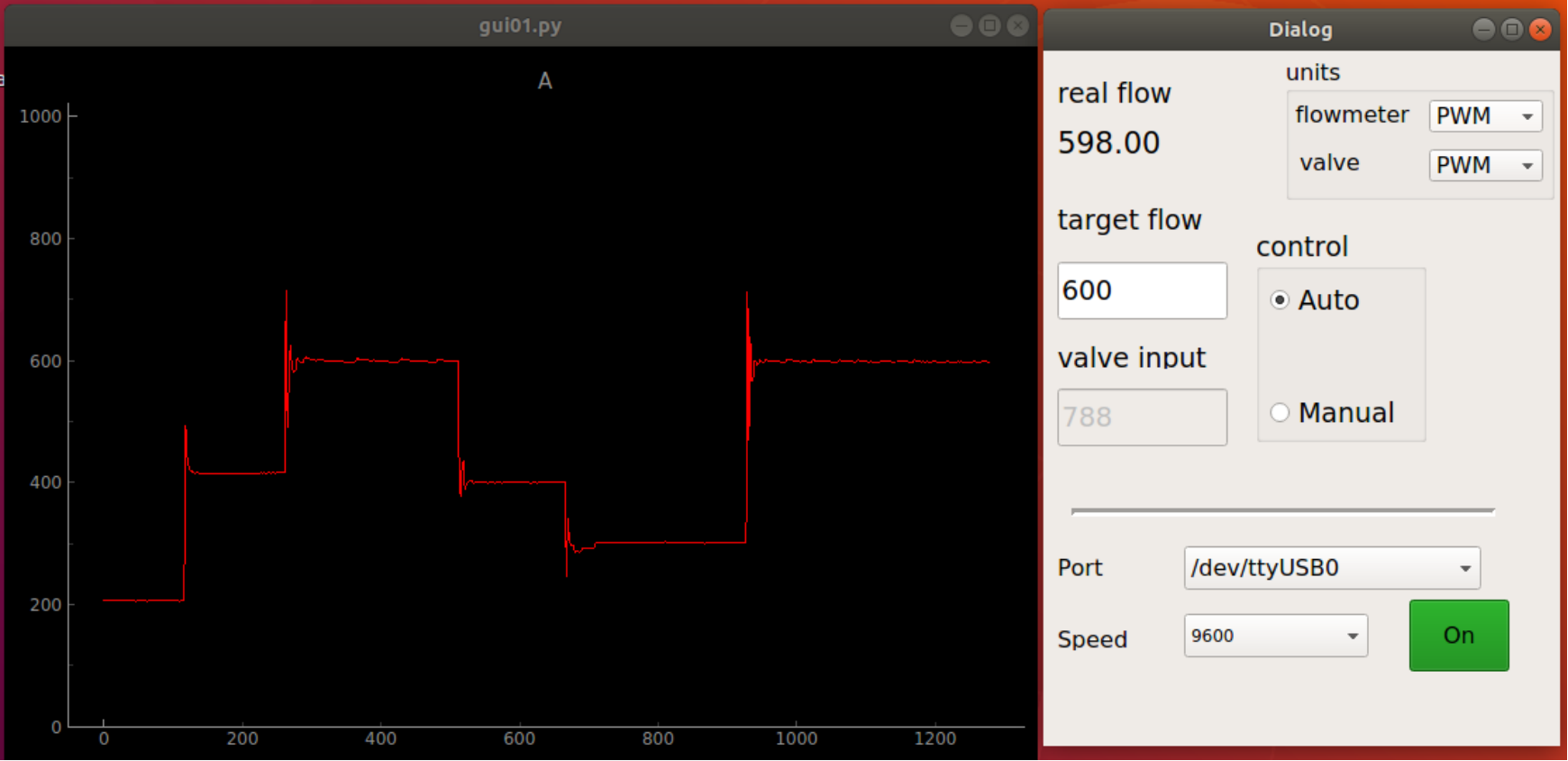 A figura mostra a aparência da interface gráfica do usuário e um gráfico da vazão de gás obtida no modo automático e mostra a alternância do RWG entre diferentes valores da vazão suportada. Os resultados são apresentados em unidades de 0 a 1023.Para demonstrar as possibilidades de manter uma vazão constante de gás, consideramos o caso em que a vazão quando a válvula proporcional é aberta por um valor constante “flutua”, conforme mostrado no lado esquerdo do gráfico (x <950) na figura abaixo. O resultado da operação da manutenção automática da vazão definida pode ser visto no lado direito do gráfico (x> 1000). Os testes mostraram que o desvio da vazão definida no modo de espera automática não é superior a 2%.
A figura mostra a aparência da interface gráfica do usuário e um gráfico da vazão de gás obtida no modo automático e mostra a alternância do RWG entre diferentes valores da vazão suportada. Os resultados são apresentados em unidades de 0 a 1023.Para demonstrar as possibilidades de manter uma vazão constante de gás, consideramos o caso em que a vazão quando a válvula proporcional é aberta por um valor constante “flutua”, conforme mostrado no lado esquerdo do gráfico (x <950) na figura abaixo. O resultado da operação da manutenção automática da vazão definida pode ser visto no lado direito do gráfico (x> 1000). Os testes mostraram que o desvio da vazão definida no modo de espera automática não é superior a 2%.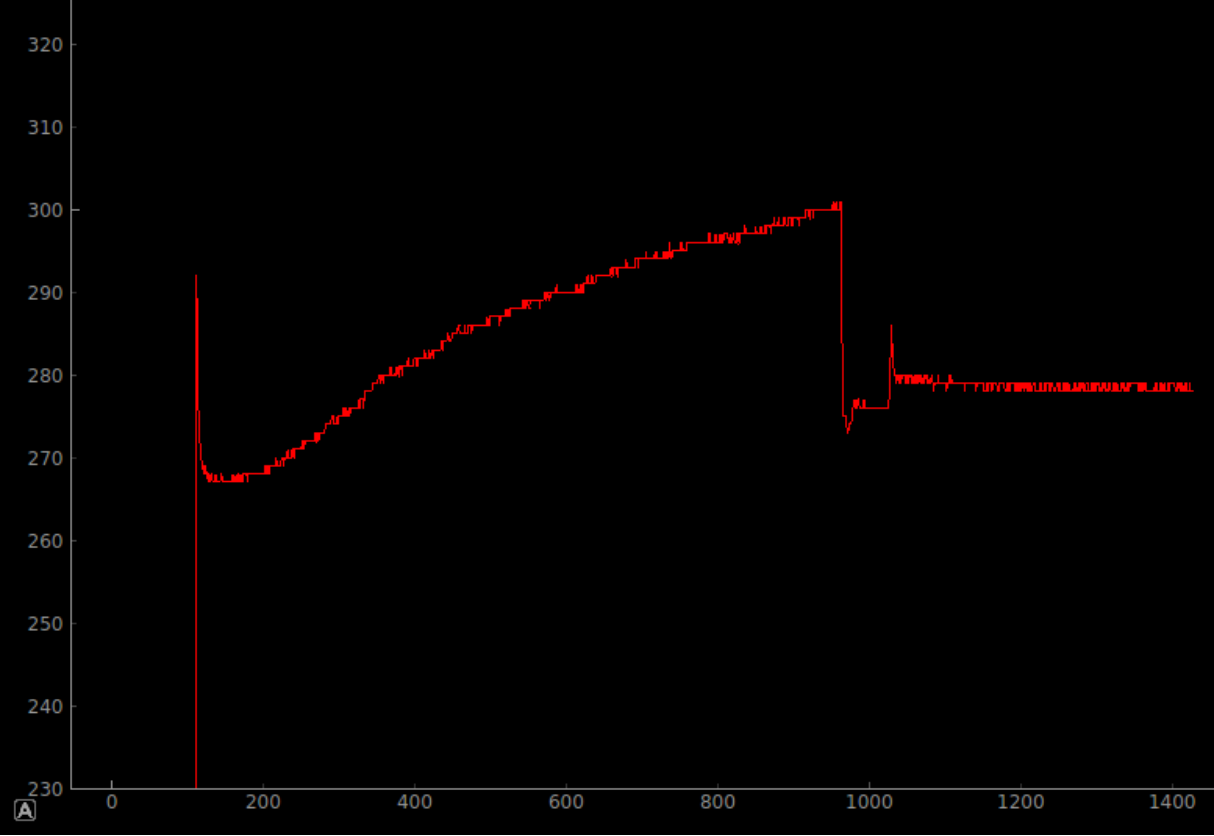
Observações
O uso do microcontrolador Arduino Nano é desnecessário, pois apenas uma pequena parte de seus pinos está envolvida. Por outro lado, seria melhor usar microcontroladores com uma maior capacidade de bit de entradas / saídas analógicas para aumentar a precisão da medição e ajuste. Ao alterar o tipo de microcontrolador, pode ser necessário implementar seu próprio controlador PID, o que não deve causar dificuldades, pois o algoritmo é simples.No estágio de desenvolvimento, o circuito elétrico foi montado em uma tábua de pão (veja a Figura 2). Para uso posterior, é necessário soldar o circuito e colocá-lo no alojamento.Os autores do artigo não são engenheiros eletrônicos nem programadores; portanto, dicas construtivas para melhoria são bem-vindas.Materiais adicionais
Os códigos-fonte do firmware do Arduino e dos programas Python, bem como a documentação dos medidores de vazão e válvulas proporcionais usadas, estão disponíveis no GitHubAgradecimentos
Somos gratos aos nossos colegas pela idéia do sistema implementado neste trabalho. AlexGyver e outros usuários compartilham generosamente suas experiências pelas informações que usamos em nosso trabalho.achados
O uso de um sistema de feedback composto por uma válvula proporcional, um medidor de vazão e um microcontrolador permite que você faça o RRG para manter um determinado fluxo de gás. Os testes mostraram um desvio da vazão necessária em menos de 2%. O custo do sistema foi inferior a 200 USD. O protótipo montado mostrou operabilidade em uma ampla gama de condições. O uso adicional pode exigir refinamento, incluindo a fiação dos circuitos, a fabricação da caixa etc.