ROS: Dedicado aos presos no Gazebo ... Plataforma para um robô por 28.000 rublos
Instruções de montagem de uma plataforma robótica para estudar ROS com capacidade de carga superior a 30 kg
ROS é um sistema meta-operacional (código aberto) para robôs. Tornou-se um padrão da indústria. Com uma interface de mensagens pronta entre os diferentes nós do seu sistema e um grande número de soluções prontas para vários componentes, é muito fácil construir o seu robô.Para ROS, existe um ambiente de simulador de Gazebo, ou seja, Você pode programar o robô sem precisar fisicamente. O primeiro conhecimento do ROS é uma delícia para a maioria; você publica e lê tópicos, tenta gerenciar o tartaruga. E pode haver um problema com a transição para robôs totalmente funcionais que interagem com o ambiente. Alguma parte vai além e cria o robô necessário no simulador. Muitos ficam presos no gazebo, dedico esse post a eles.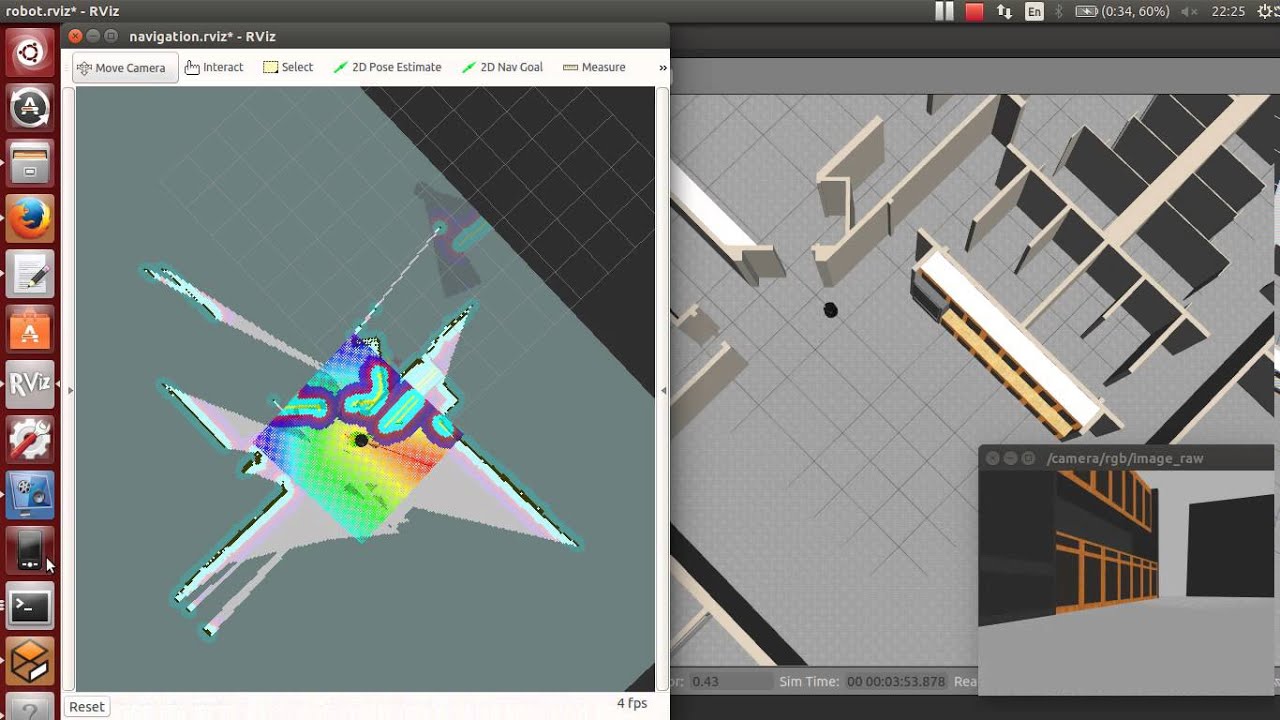 Após publicar o habr.com sobre robôs e robótica, os clientes me contatam com a necessidade de desenvolver soluções robóticas. Uma tarefa interessante é organizar a navegação de robôs de logística com a obtenção de objetivos globais a partir do sistema de gerenciamento de armazém (WMS) existente. O próprio cliente desenvolve a mecânica do caminhão, mas para trabalhar no software em paralelo, é necessária uma plataforma que possa simular o movimento de mercadorias. Além disso , testando os algoritmos do nosso robô nas condições de um inverno rigoroso e chuvoso, precisávamos de uma plataforma interna. Compôs os requisitos mínimos de equipamento:
Após publicar o habr.com sobre robôs e robótica, os clientes me contatam com a necessidade de desenvolver soluções robóticas. Uma tarefa interessante é organizar a navegação de robôs de logística com a obtenção de objetivos globais a partir do sistema de gerenciamento de armazém (WMS) existente. O próprio cliente desenvolve a mecânica do caminhão, mas para trabalhar no software em paralelo, é necessária uma plataforma que possa simular o movimento de mercadorias. Além disso , testando os algoritmos do nosso robô nas condições de um inverno rigoroso e chuvoso, precisávamos de uma plataforma interna. Compôs os requisitos mínimos de equipamento:- Plataforma com 2 rodas
- Capacidade de carga não inferior a 30 kg.
- Lidar RPlidar A1
- Computador de placa única Raspberry Pi
- Arduino Mega Platform
- Sonar
O primeiro pensamento foi usar uma plataforma pronta. Apreciamos o mercado por soluções ROS similares. O TurtleBot3 Burger e o robô em Neato não nos agradaram, porque queria simular a entrega de caixas.Após a coleta desses dados, foi tomada uma forte decisão de construir uma plataforma. Reunimos a plataforma de orçamento máximo, posto instruções de montagem, talvez seja útil para alguém.Tamanho da caixa 320 * 620 * 195mmO corpo será fabricado por fresagem CNC de um material composto. Quem precisa de um arquivo para cortar, me escreva um e-mail, no final do post.Ao cortar slots fornecidos para locais de flexão. Montagem nos cantos.Rodas BLDC 10 ', motorista, bateria e carregamento são retirados do giroscópio. Você pode comprar um novo para isso, em qualquer caso, será mais barato que as partes correspondentes separadamente.Fixamos as rodas no estojo usando as peças impressas https://www.thingiverse.com/thing:2990353A placa do giroscópio precisa ser reflorestada. Eu usei esse firmwaregithub.com/NiklasFauth/hoverboard-firmware-hack , existem variações. Existe um compilador online na Internet.Como base para a navegação, usaremos a odometria das rodas e o Rplidar A1.Como computador, o Raspberry Pi como uma solução popular de orçamento, estamos pensando na versão com o jetsoin nano.Como o lidar exige até 1A, Raspberry Pi até 2A, o Arduino decidiu fornecer um divisor USB com fonte de alimentação separada por meio de um conversor abaixador da bateria principal.


 O ROS Master está localizado em um computador separado, pois planejamos adicionar uma câmera com sentido real.A maioria dos nós está em execução no computador mestre:
O ROS Master está localizado em um computador separado, pois planejamos adicionar uma câmera com sentido real.A maioria dos nós está em execução no computador mestre:- nó para obter as coordenadas do alvo atual da base
- alegria
- move_base
- amcl
- gmapping
Parte dos nós no rover:- rosserial_arduino
- rplidar_ros
Este robô tem todas as chances de se tornar um projeto comercial separado.Ainda há muito trabalho:- precisa criar um modelo de urdf
- desenvolver cenários de uso da plataforma
- considere a compatibilidade com outro equipamento
- configurar o trabalho de vários robôs ao mesmo tempo
Outras opções de alojamento Se você deseja adquirir este kit pelo custo de componentes ou se tornar parte do projeto e desenvolver este produto conosco, escreva-me https://forms.yandex.ru/u/5e3d0be770f10402303acf87/Source: https://habr.com/ru/post/undefined/
All Articles