 polargraph.co.ukMereka mengatakan bahwa Rusia memanfaatkan untuk waktu yang lama, tetapi pergi cepat. Ide untuk mengumpulkan setengah paragraf datang kepada saya 5 tahun yang lalu setelah membaca sebuah artikel tentang seorang pemain di floppy drive . Pertama saya menemukan drawbot di floppy, dan kemudian setengah paragraf. Jangan bertanya apa hubungan antara ini, itu bukan. Sebagian besar menggunakan manual dengan instruksi .
polargraph.co.ukMereka mengatakan bahwa Rusia memanfaatkan untuk waktu yang lama, tetapi pergi cepat. Ide untuk mengumpulkan setengah paragraf datang kepada saya 5 tahun yang lalu setelah membaca sebuah artikel tentang seorang pemain di floppy drive . Pertama saya menemukan drawbot di floppy, dan kemudian setengah paragraf. Jangan bertanya apa hubungan antara ini, itu bukan. Sebagian besar menggunakan manual dengan instruksi .Aksesoris
- Arduino uno
- Driver Motorhield Motor AdaFruit. Saya memiliki Motor Drive Shield L293D untuk Arduino / Wze.
- 2 motor stepper NEMA-17. Saya menggunakan Hybrid Stepping Motor 42BYGH202 / Wze.

- Catu daya AC / DC
- Gondola. Saya membuatnya dari dudukan disk, saya perlu membuat dua lubang untuk memasang kabel, dan yang ketiga untuk memuat.

instructables.com - Sasis dari kumparan dari mesin jahit (ada celah antara kumparan dan sumbu mesin, saya meletakkan sepotong karet). Lebih baik menggunakan tali pancing, daripada benang.
- Permukaan tempat motor dipasang. Lebih besar lebih baik. Penulis dengan instrabel menggunakan dukungan motor (kurung), saya hanya menempelkannya pada karton yang saya tempelkan ke tablet A2.
Arduino
Instal versi terbaru Arduino IDE (yang lama tidak dapat memuat kode). Atur jalur ke folder dengan sketsa (/ sketsa /): File -> Pengaturan -> Lokasi folder sketsa.Unduh kode dari github euphy .Buka paket arsip. Salin perpustakaan Adafruit dan AccelStepper ke folder / sketsa / perpustakaan /, folder polargraph_server_a1 ke folder / sketsa /.Luncurkan Arduino IDE. File -> Folder dengan sketsa -> polargraph_server_a1. Kami mengkompilasi, mengunggah ke papan tulis.Motor stepper
Tentang motor stepper ada artikel bagus tentang Habr. Dengan coba-coba, saya menghubungkan mereka ke papan: mesin kiri - ke terminal M1, M2, kanan - M3, M4.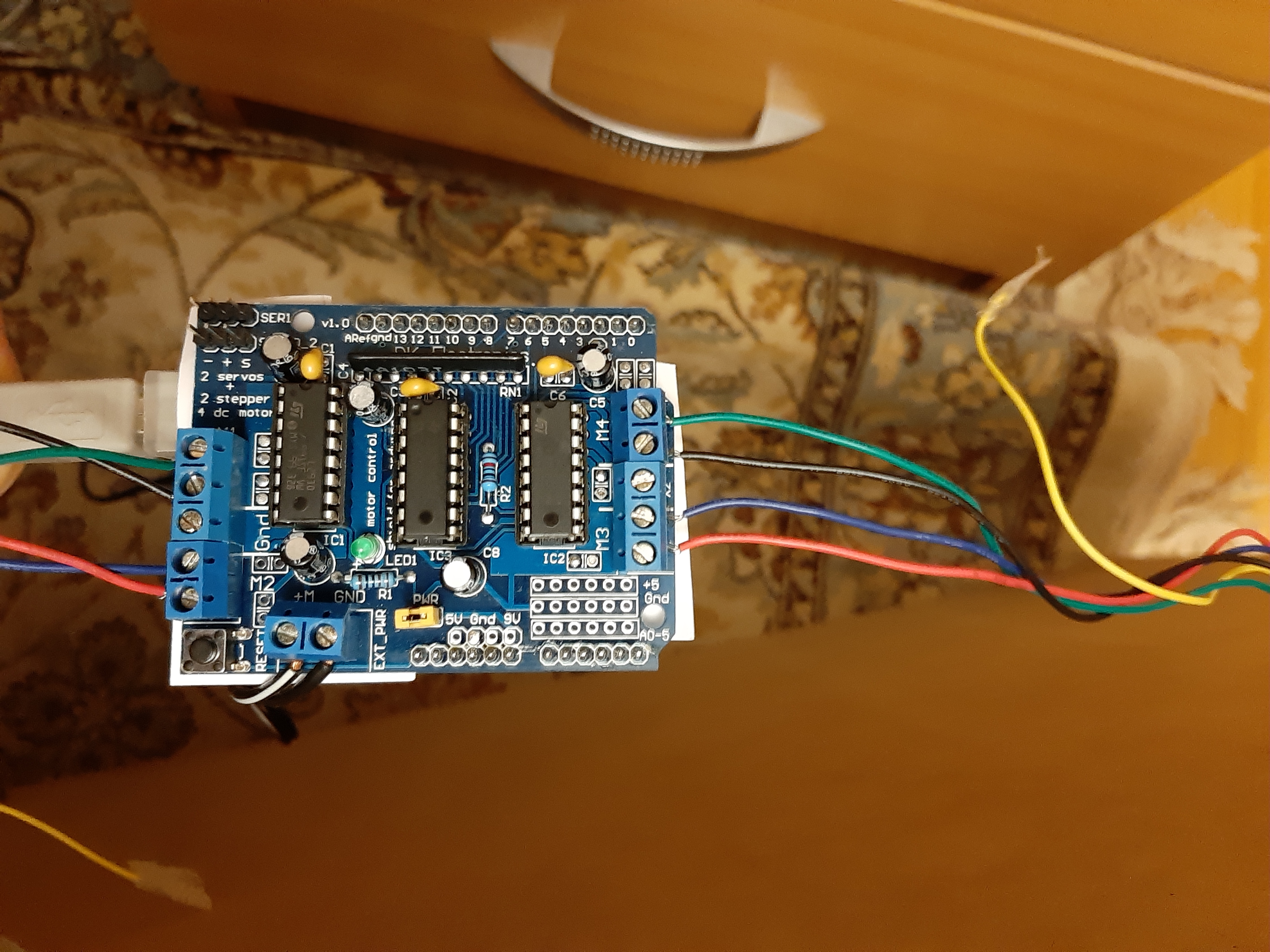
Instalasi perangkat lunak
Dari arsip euphy yang diunduh sebelumnya, buka kemasan / controller / folder.Dalam file default.properties.txt , tentukan dimensi yang diperlukan: lebar dan panjang mesin, lebar dan panjang lembar, titik awal. Mereka perlu diukur dengan cukup akurat, hingga milimeter, jika tidak akan ada distorsi pada gambar. Saya akan menunjukkan contoh di bawah ini, saya yang melakukannya.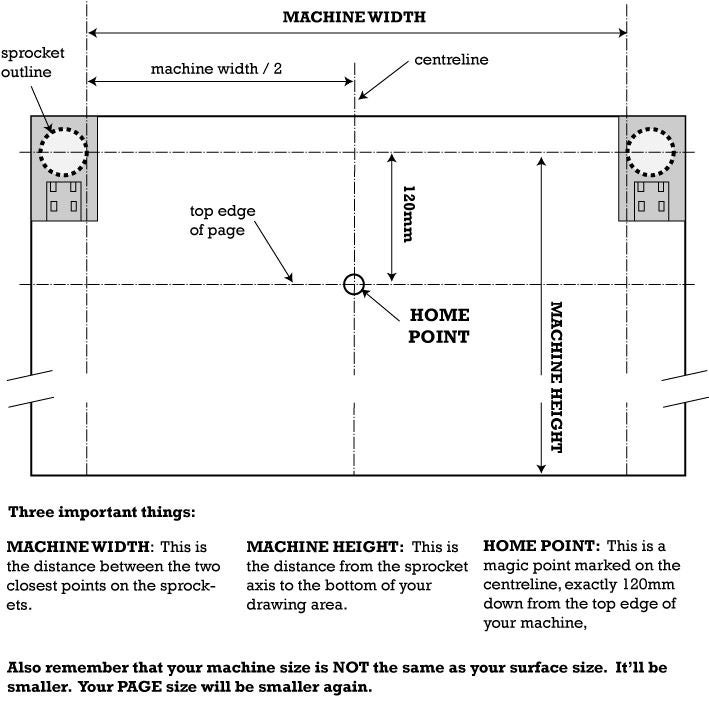 instructables.comLuncurkan aplikasi:
instructables.comLuncurkan aplikasi:sudo chmod +x polargraphcontroller
./polargraphcontroller
 Di tab SETUP, pilih port yang diinginkan (SERIAL PORT). Prasasti hijau akan muncul di bagian atas bahwa poshraf siap. Atur gondola ke titik HOME POINT.Pada tab INPUT, pilih LOAD IMAGE. Unggah gambar, ubah ukuran jika perlu (RESIZE IMAGE). Pindahkan gambar (PINDAHKAN GAMBAR) ke area lembar, pilih fragmen yang diinginkan (SELECT AREA), kurangi GRID SIZE jika perlu dan tekan RENDER PIXELS. Di jendela pop-up, Anda harus memilih tempat menggambar (TOP-KANAN) dan gaya (VARIABEL GELOMBANG UKURAN SQUARE) mulai.
Di tab SETUP, pilih port yang diinginkan (SERIAL PORT). Prasasti hijau akan muncul di bagian atas bahwa poshraf siap. Atur gondola ke titik HOME POINT.Pada tab INPUT, pilih LOAD IMAGE. Unggah gambar, ubah ukuran jika perlu (RESIZE IMAGE). Pindahkan gambar (PINDAHKAN GAMBAR) ke area lembar, pilih fragmen yang diinginkan (SELECT AREA), kurangi GRID SIZE jika perlu dan tekan RENDER PIXELS. Di jendela pop-up, Anda harus memilih tempat menggambar (TOP-KANAN) dan gaya (VARIABEL GELOMBANG UKURAN SQUARE) mulai. Di sebelah kanan, untuk memulai antrian perintah, klik pada prasasti merah (berubah menjadi hijau): ommandQueue: QUEUE RUNNING.Butuh waktu sekitar satu jam untuk menggambar prasasti. Gambar corat-coret di kanan atas, karena saya pertama kali memilih gaya SANGAT SANGAT. Kompresi sumbu Y terlihat karena pengukuran yang tidak akurat.
Di sebelah kanan, untuk memulai antrian perintah, klik pada prasasti merah (berubah menjadi hijau): ommandQueue: QUEUE RUNNING.Butuh waktu sekitar satu jam untuk menggambar prasasti. Gambar corat-coret di kanan atas, karena saya pertama kali memilih gaya SANGAT SANGAT. Kompresi sumbu Y terlihat karena pengukuran yang tidak akurat. Kecepatan setengah paragraf.
Kecepatan setengah paragraf.