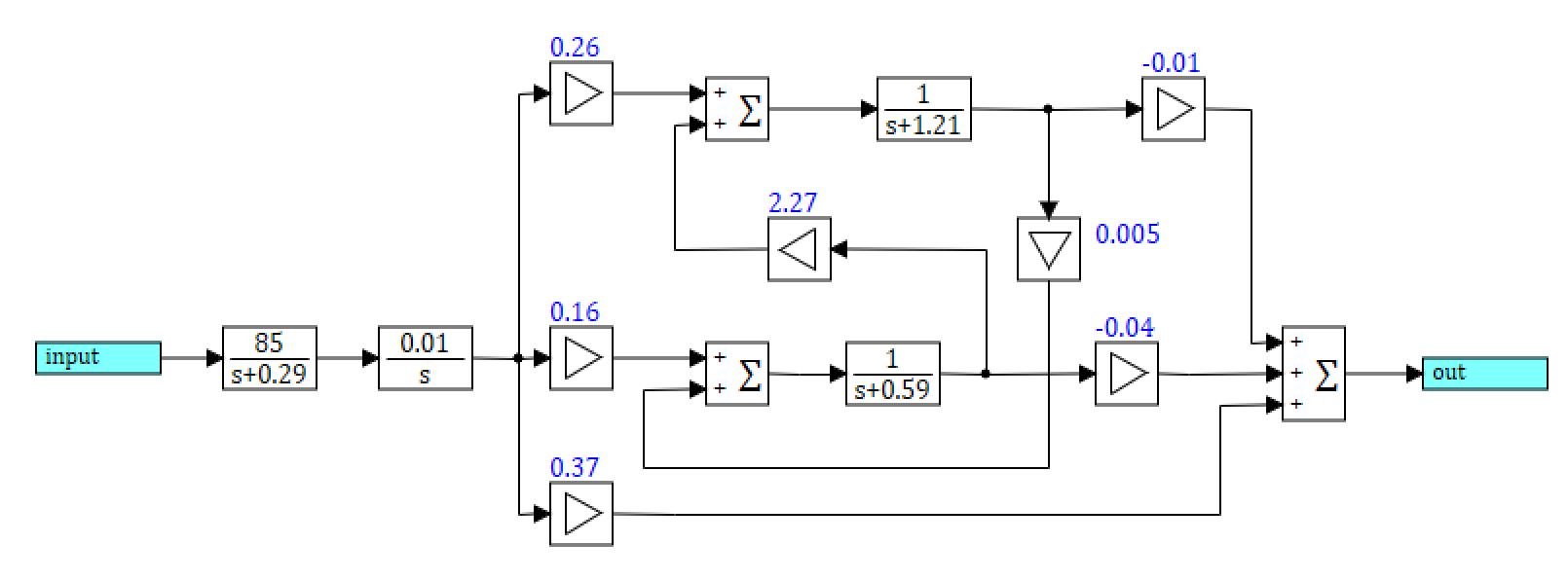
Kami terus mempelajari logika fuzzy menurut buku oleh V. Gostev, "Pengendali Fuzzy dalam Sistem Kontrol Otomatis". Setelah kami menikmati pemandangan indah dari permukaan respons , kami melanjutkan langsung ke pemecahan masalah berikutnya dari buku V. Gostev "Regulator Fuzzy dalam Sistem Kontrol Otomatis".
Teks ini merupakan kelanjutan dari publikasi sebelumnya:
- Kontroler sederhana berdasarkan logika fuzzy. Penciptaan dan kustomisasi.
- Logika fuzzy dalam gambar yang indah. Permukaan respons untuk berbagai fungsi keanggotaan.
- Membuat pengontrol berdasarkan logika fuzzy dengan pengaturan multi-channel.
- Logika fuzzy sederhana dicetak "dari apa dulu" untuk mesin turbin gas.
- Logika fuzzy terhadap PID. Kami menyeberang landak dan ular. Mesin pesawat terbang dan algoritma kontrol PLTN.
Bagi mereka yang tidak terbiasa dengan logika fuzzy, saya sarankan Anda pertama kali membaca teks pertama, setelah itu, semua yang dijelaskan di bawah ini akan menjadi sederhana dan jelas.
, - . , . , Fuzzy. , , . , , , , .
, , , .
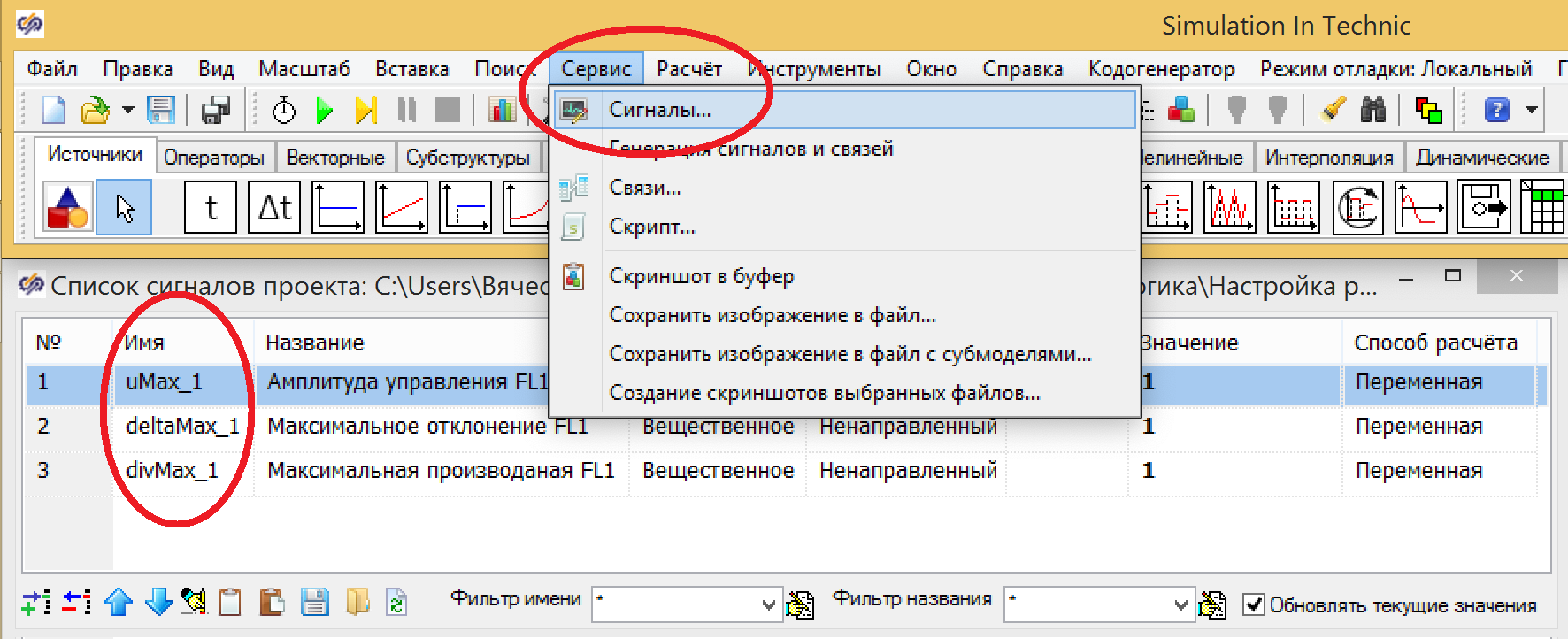
– -, (). , , « . »
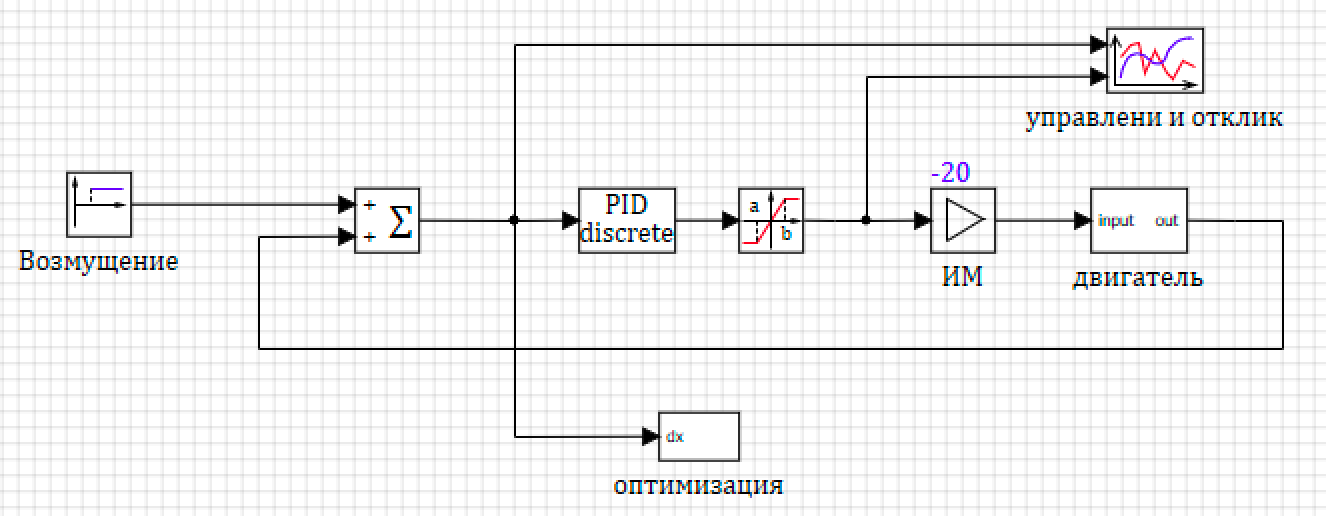
, , , 1 ( ).
1. .
.
. 1 . , . – , .
: – , – . , 0.009 .
, -.
, 2. – 20, (- «as is» .. ).
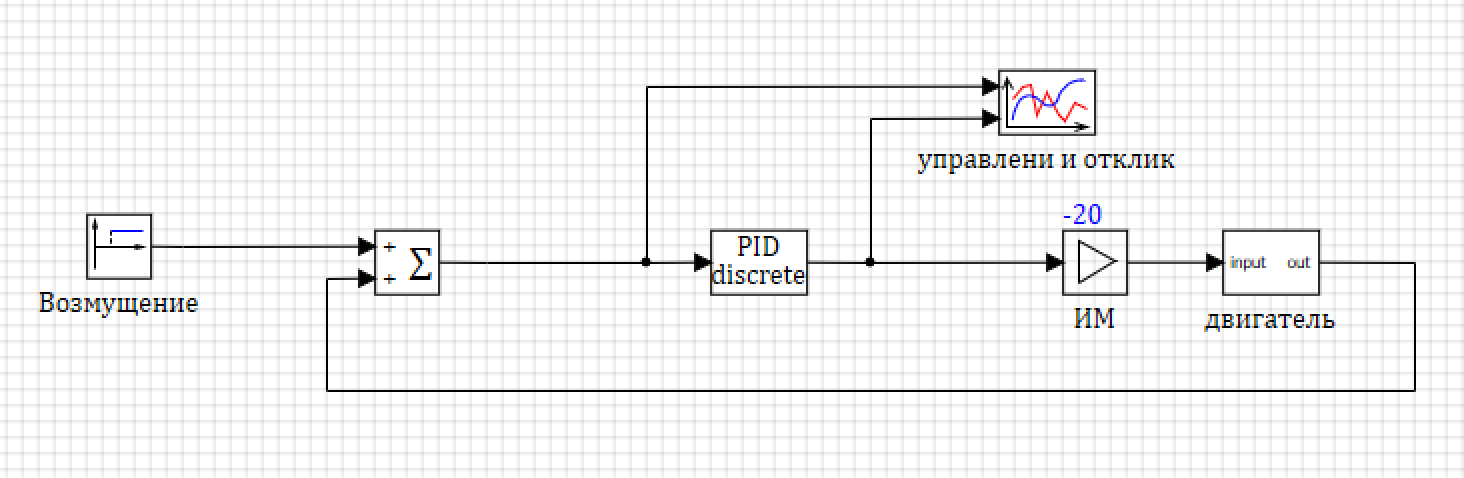
2. .
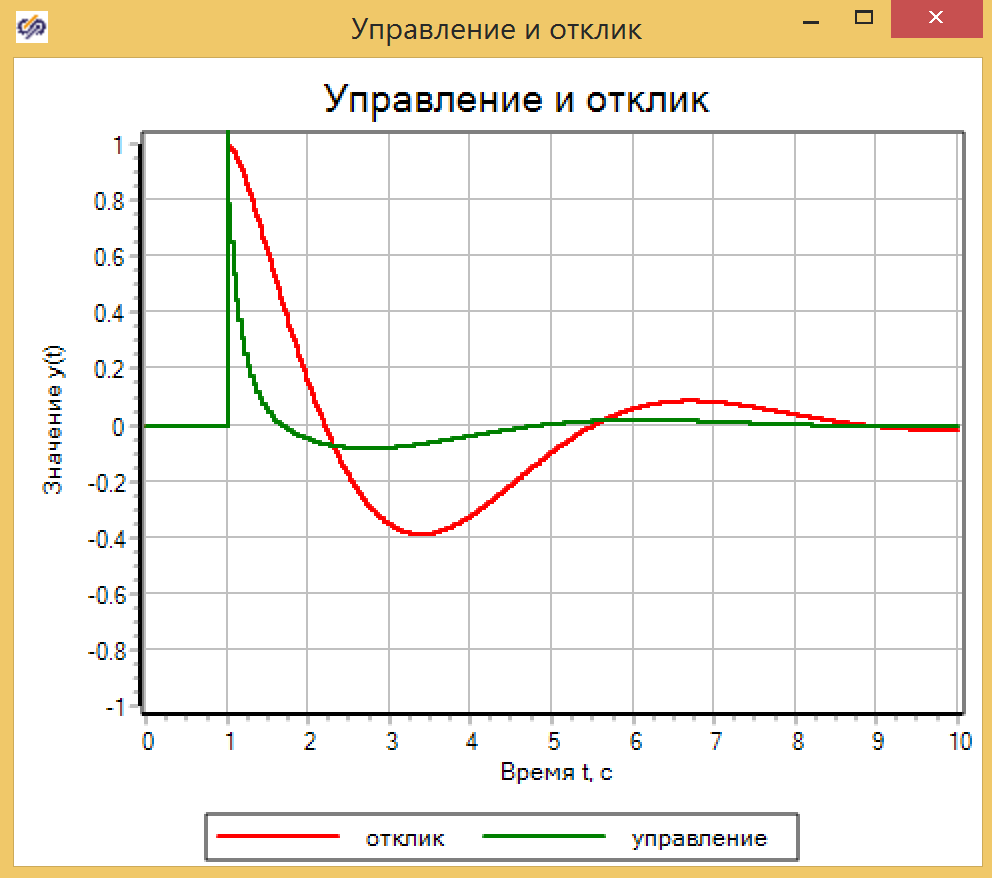
- 0.001 0.001.
- 1,1,1 . 3.
, , 1 1000, 0,001. , . , -1 1 , 0 7 .
Apa yang bisa Anda katakan dengan melihat grafik ini? Sudahlah. Dan semua karena model kami sudah disajikan sebagai fungsi transfer dalam penyimpangan, dan kami tidak dapat mengatakan apakah itu cepat atau tidak. Kami tidak bisa mengatakan apa-apa tentang mesin. Seperti yang telah saya tunjukkan di artikel “Teknologi untuk mendapatkan persamaan dinamis TAU. Dan mengapa Identifikasi Sistem menyebalkan, dan aturan “fisika jujur” mengatur : transformasi sistem fisik parametrik menjadi sejenis fungsi pemindahan menghancurkan seluruh rekayasa “pemahaman” model.Misalnya, apakah dampak pada model dengan nilai 1000 yang diperoleh setelah PID mungkin terjadi dalam kehidupan? Tidak dikenal Jika ini adalah pasokan bahan bakar, maka jelas bahwa sistem pasokan tidak akan mampu menjejalkan bahan bakar 1000 kali lebih banyak daripada dalam mode siaga., 10, -10. . , . :

4. .
, , ( 5). 1000, , 10.
5. .
.
C . 0
6. .
7.
 7. ..
7. ... :
— – , 0.009.
— .
«-3» . , , , — .
« » .
, , . , .
, « » , , .. .
, , . , .
, . , , , .
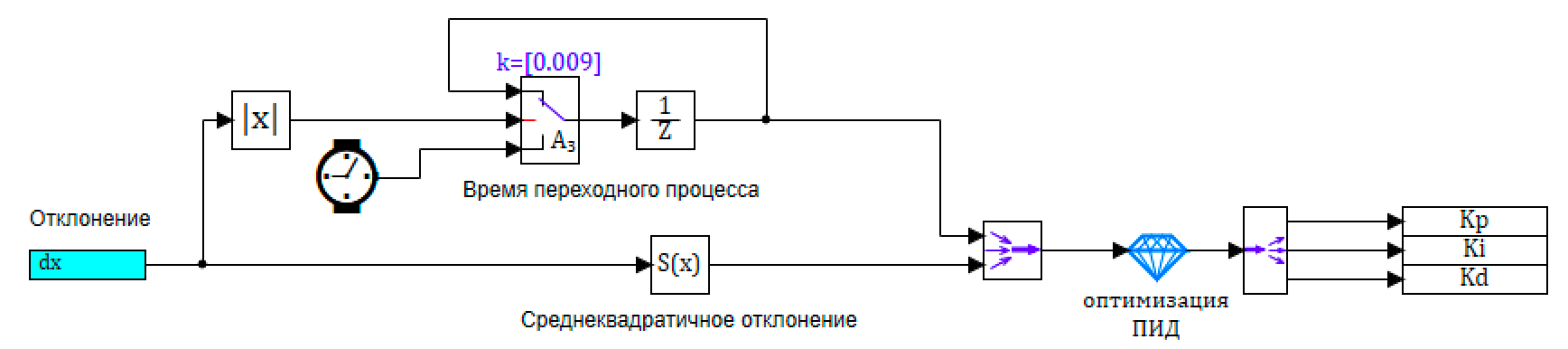
8.

8. .
. , , . p, Ki, Kd (. . 7 . 8). -. (. 10.)
9. .
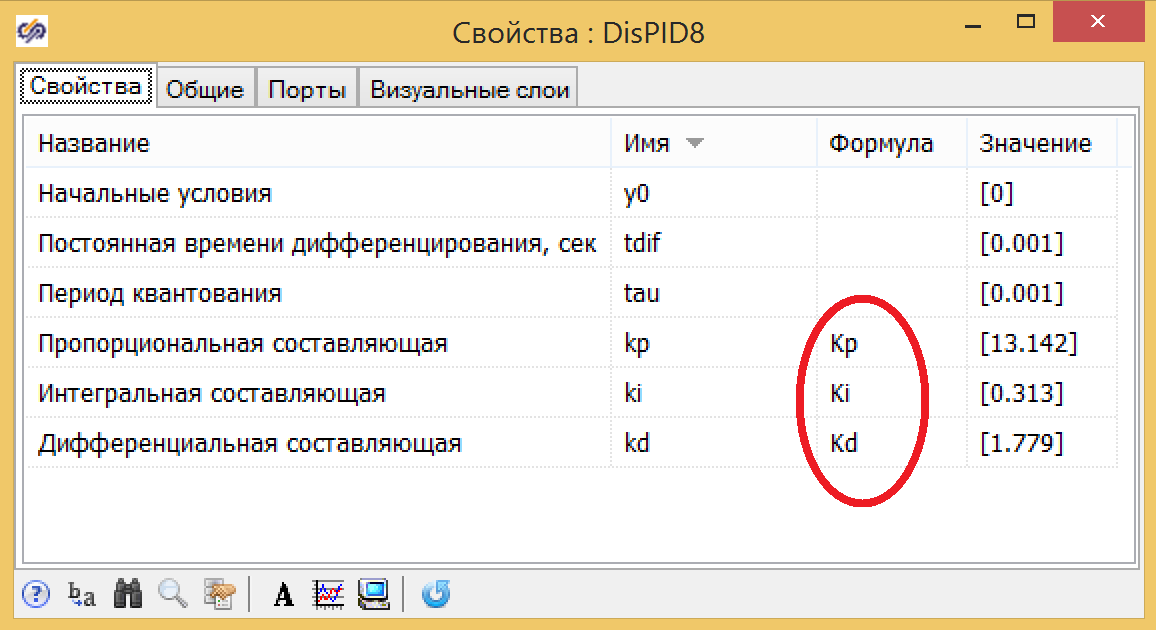
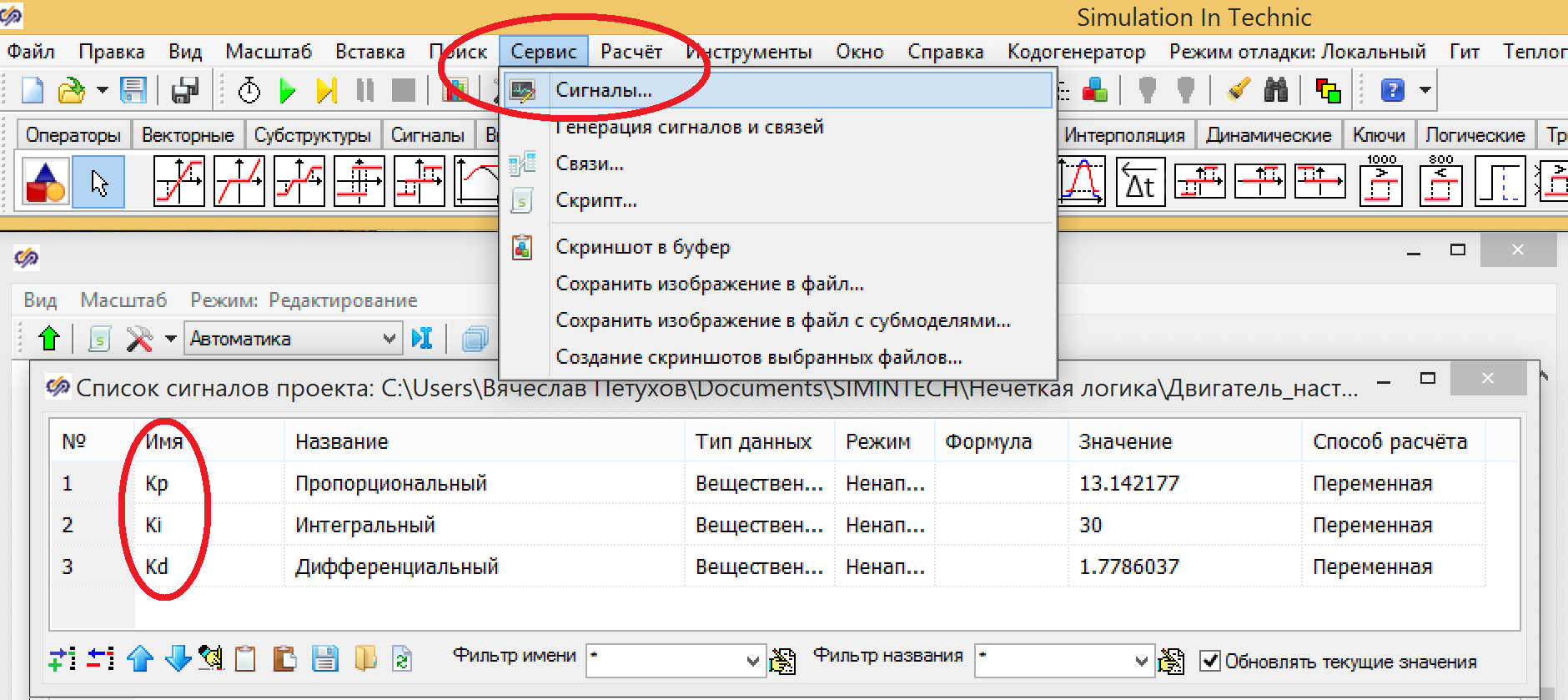
10. -.
:
Kp = 13.142
Ki = 0.313
Kd = 1.779
0.72 . 11.

11. -.
, .
1 , . .
Sinyal deviasi yang masuk dan laju variasi deviasi, melewati unit pentahapan, masing-masing didekomposisi menjadi tiga istilah. Menggunakan fungsi keanggotaan Gauss.
Penyimpangan - lebih banyak , norma , kurang .Tingkat perubahan yang tumbuh , tidak berubah , jatuh .Regulator akan memberi efek ketika deviasi muncul, dan juga ketika laju perubahan regulator mengindikasikan bahwa deviasi akan meningkat (walaupun saat ini normal). Aturan dasar untuk regulator:
- ( (0) ), .
- , 0.
- ( (0) ), .
, , 12.

12. Fuzzy Logic.
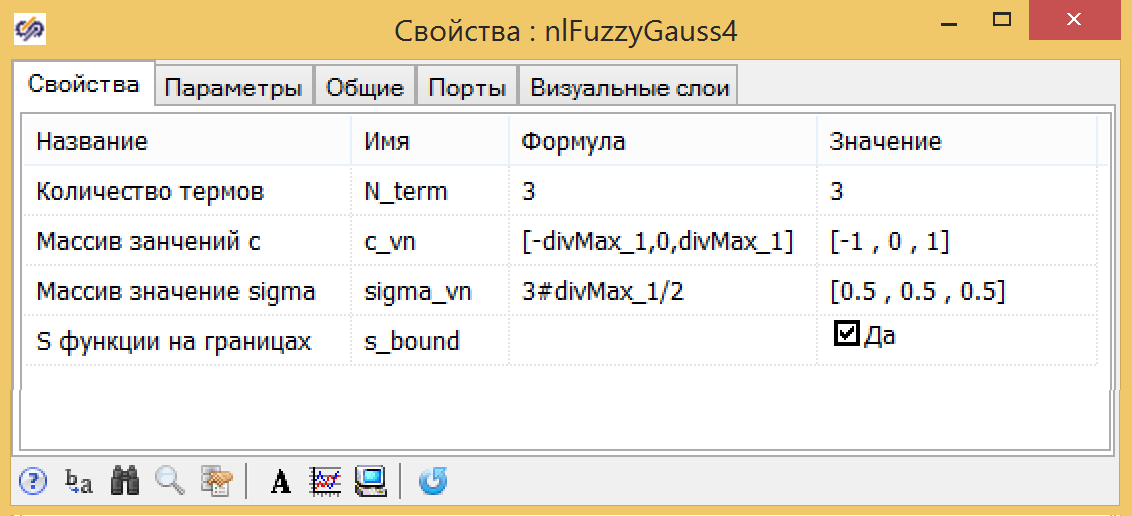
. , 0, . :
- uMax_1 – ;
- deltaMax_1 – ;
- divMax_1 – .
– . 13.
13. .
(–uMax_1… uMax_1) [–uMax_1 ,0, uMax_1], , 2. (. , ).
, :
 14. .
14. ..
, :
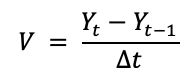 di mana:Y t adalah nilai saat ini;Y t-1 adalah nilai pada langkah sebelumnya;Δt = 0,001 - langkah waktu sama dengan ketika mengambil sampel kontroler PID diskrit.
di mana:Y t adalah nilai saat ini;Y t-1 adalah nilai pada langkah sebelumnya;Δt = 0,001 - langkah waktu sama dengan ketika mengambil sampel kontroler PID diskrit.Rangkaian ditunjukkan pada Gambar 15. Pembagian dengan Δt diperhitungkan dalam blok perbandingan, di mana koefisien untuk setiap input dapat diatur.
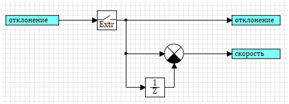
Gambar 16. Skema untuk menghitung laju perubahan.
Karena seluruh rangkaian sudah siap untuk kita, ia tetap mengganti pengontrol PID dengan pengontrol FL (lihat Gambar 17) dan lihat apa yang terjadi.
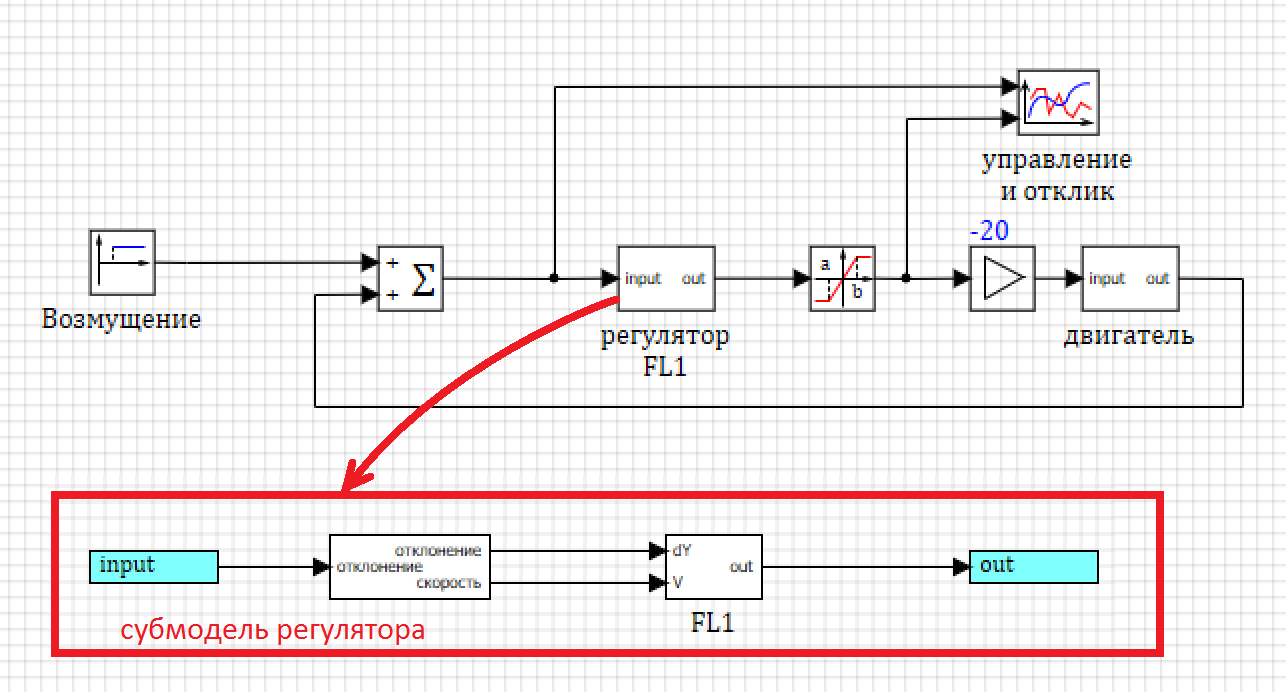
Gambar 17. Diagram model dengan satu kontroler fuzzy.
Dan lagi, sangat mengejutkan saya, kontroler fuzzy melakukan lebih baik daripada PID di pengaturan tunggal awal. Beberapa jenis iklan kontinyu dari logika fuzzy diperoleh.
Selain itu, jika dalam kasus-kasus sebelumnya dapat dikaitkan dengan fakta bahwa turunan kedua digunakan dalam pengontrol fuzzy, maka dalam hal ini pengontrol fuzzy ini menggunakan turunan yang sama, dan PID juga menggunakan komponen integral.
Agar pendukung keragaman gender tidak menuduh saya menindas pengontrol PID tradisional, koefisien komponen integral dibatalkan dan pengontrol PD diperoleh. Hasilnya telah meningkat secara signifikan, tetapi FL masih lebih baik.
Gambar 19. Kontroler PD dengan pengaturan tunggal.
, 0.009. :
– 11.25 .
— 5.25 .
FL – 4.74 .
FL
, - (. 6). :
— uMax_1 – ;
— deltaMax_1 – ;
— divMax_1 – .
1. .
, .
20. .
, , .
. .
 21. .
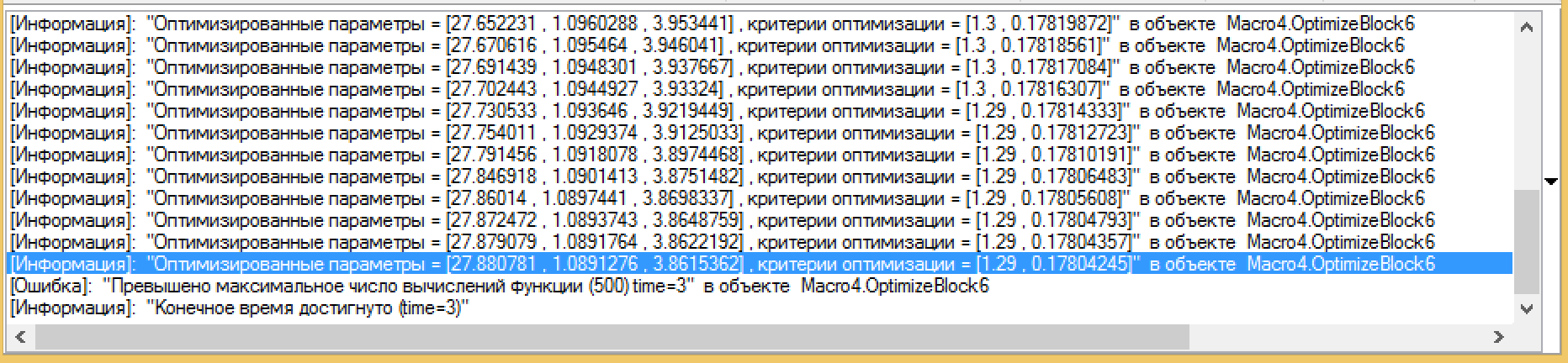
21. .0.24
[]: « = [31.10359, 1.0219553, 2.165446], = [1.24, 0.09879439]» Macro4.OptimizeBlock6
0.23 .
[]: « = [34.954824, 1.0114662, 0.058949452], = [1.23, 0.098544697]» Macro4.OptimizeBlock6
FL 22. , .
, .
, . . , , , .
, , , .
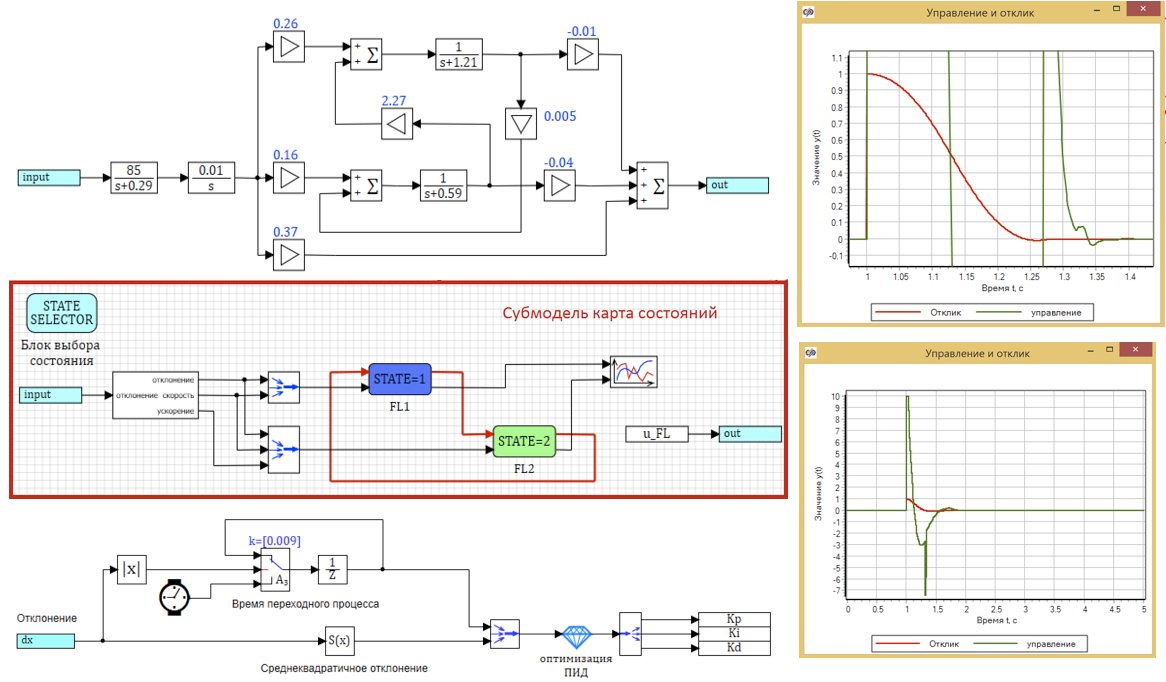
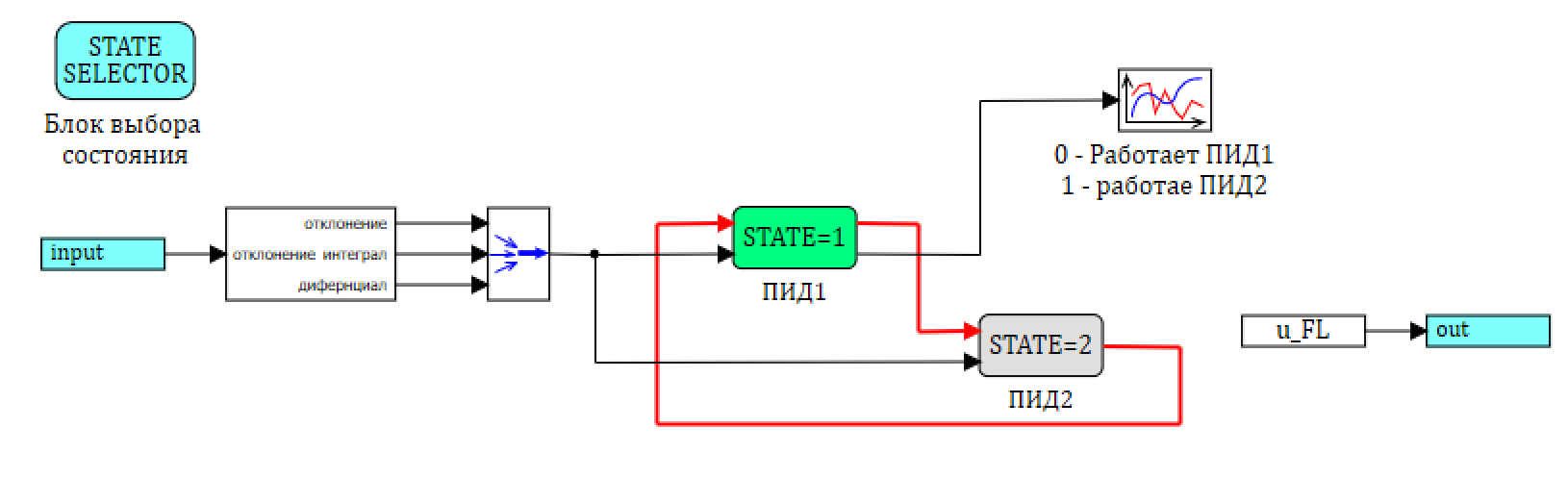
. – SimInTech, - , .
. . – FL1, — FL2. , 23:
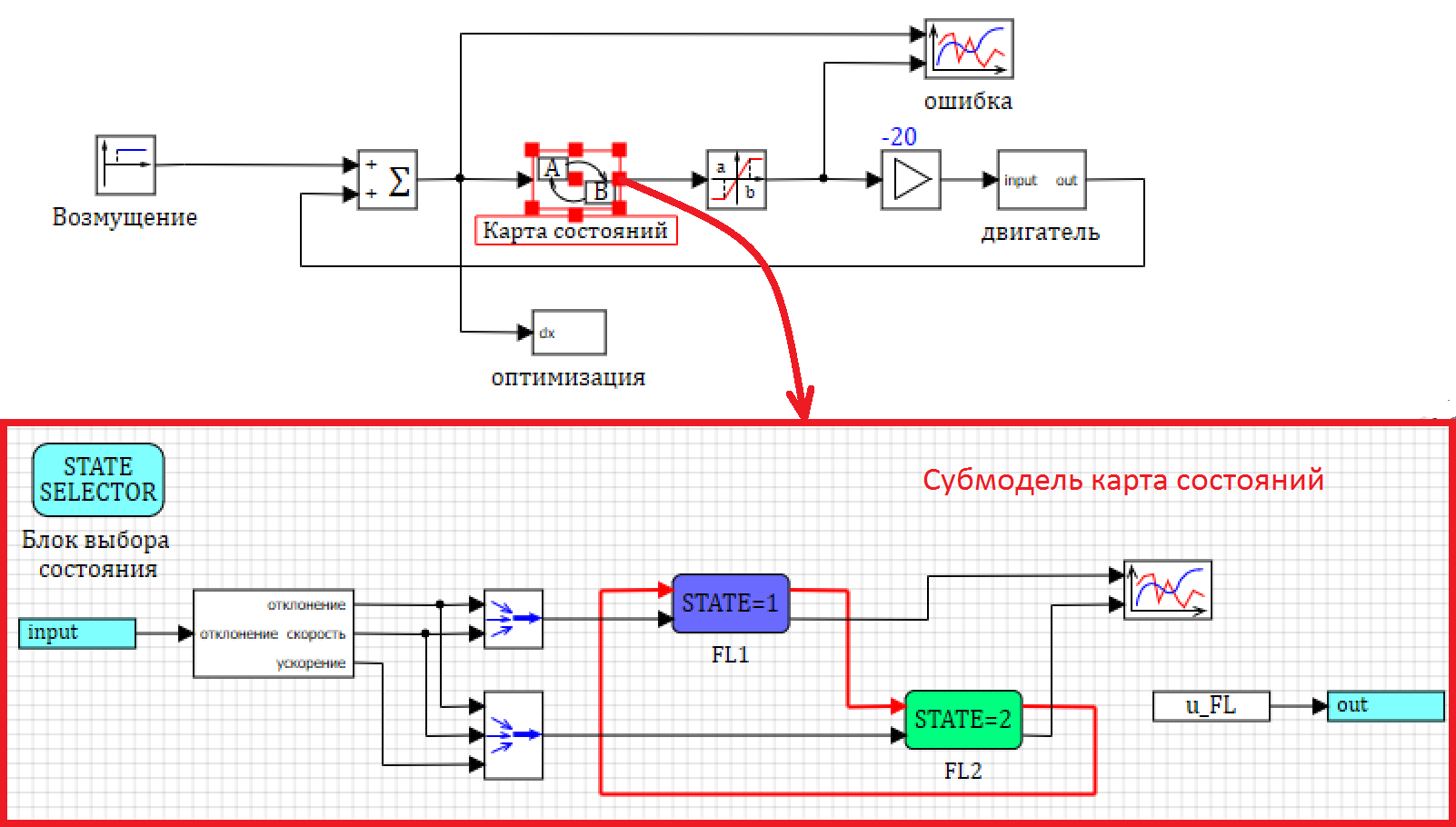
23. .
, , – , .
, .
, , , , . .
, , , «1 », , 0.001 ( ). . — .
, , , (), . , , 1000 , 1 000 000 . . . 24.
24. .
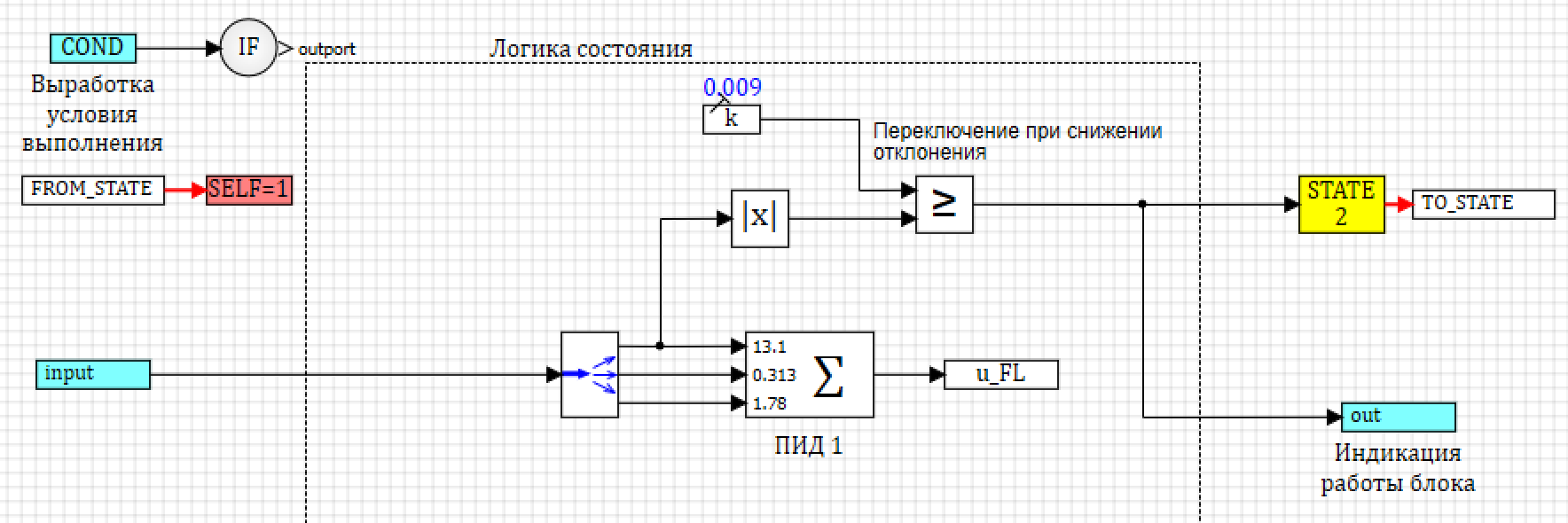
: , 0.009. , , .
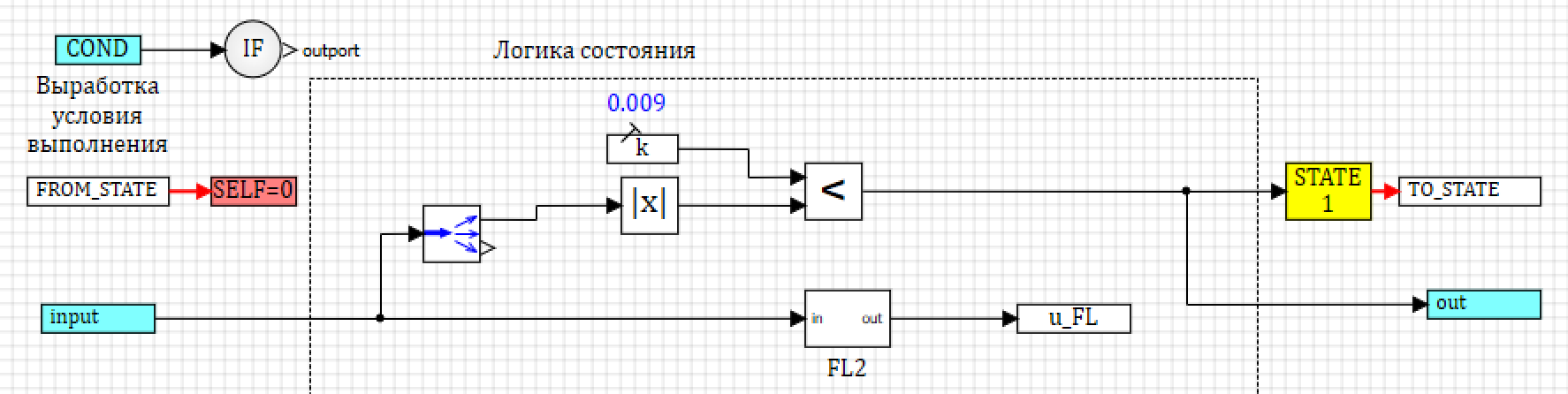
FL1, . , u_FL. , , .

25. 1.
– , 1 , 0.009.
 26. 2.
26. 2.( .. ). 24.
, , u_FL FL1, FL2 .
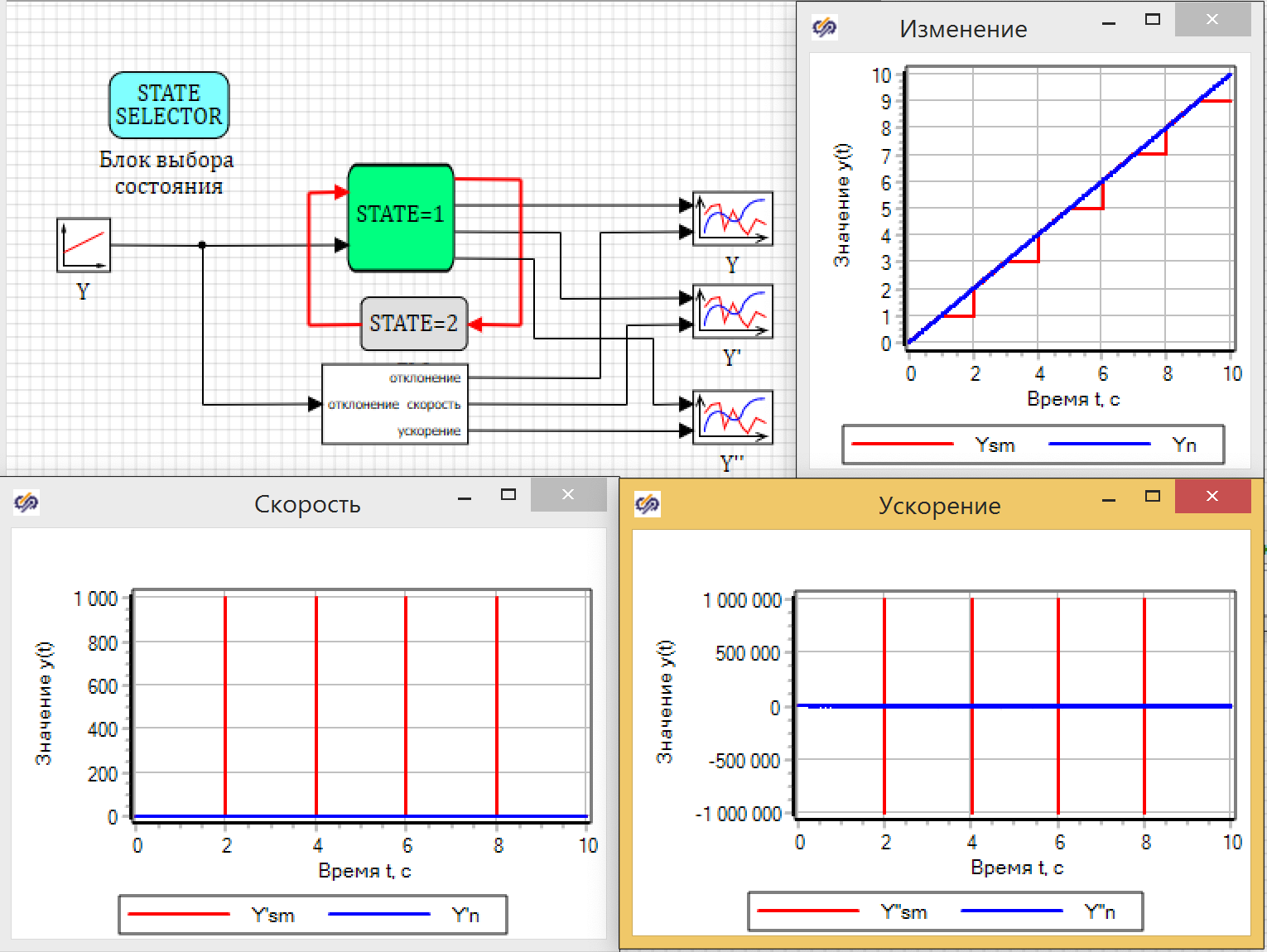
. , . , . , , .
– , , .
– , , .
— , , .
, :
1) jika penyimpangan lebih besar dan laju perubahan meningkat dan percepatan perubahan dipercepat , maka efeknya berkurang .2) jika deviasi normal dan laju perubahan konstan dan percepatan perubahan tidak berubah , maka efeknya tidak berubah .3) jika deviasi kurang dan laju perubahan menurun dan akselerasi perubahan melambat , maka dampak meningkat .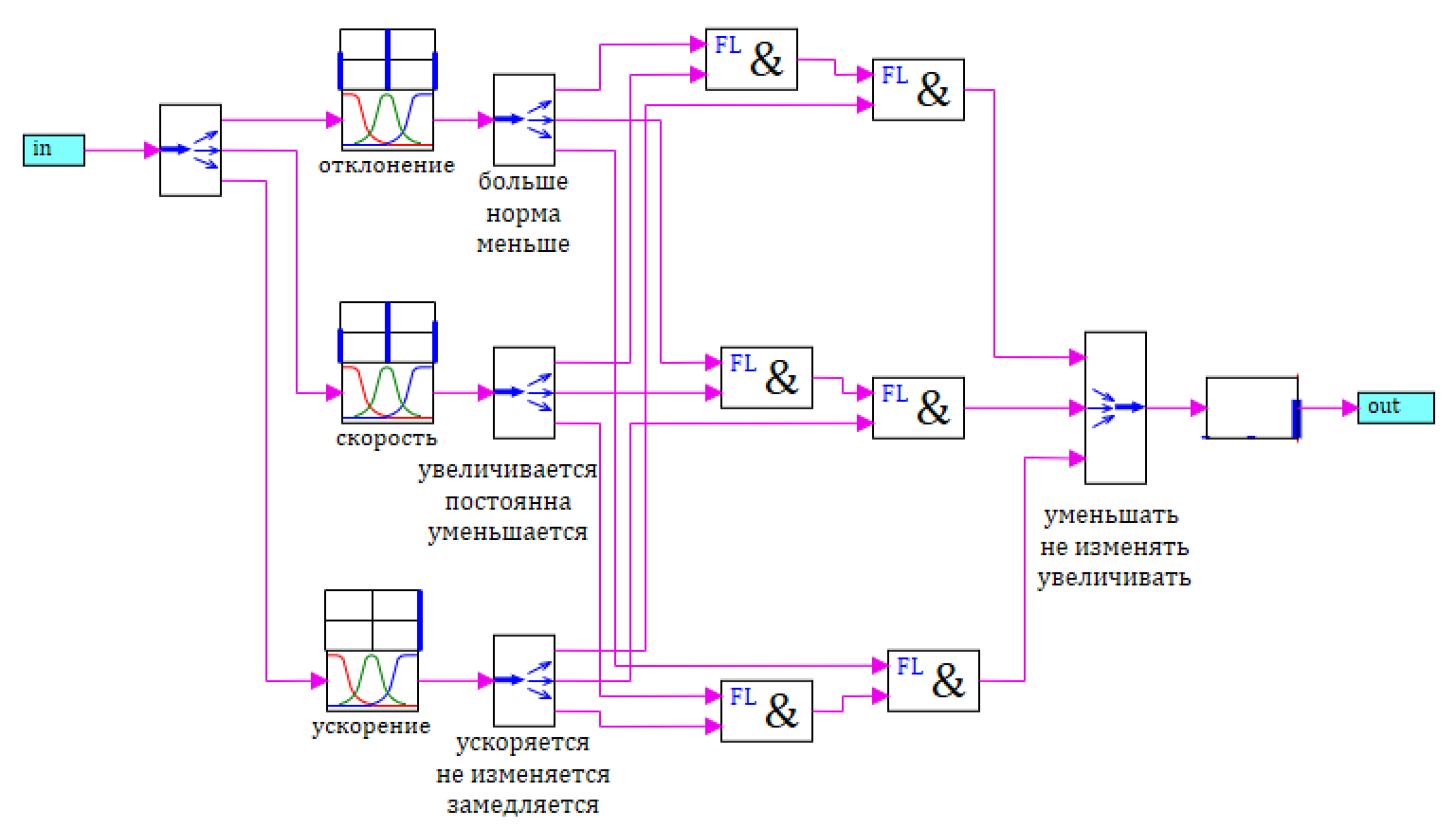
27. FL2.
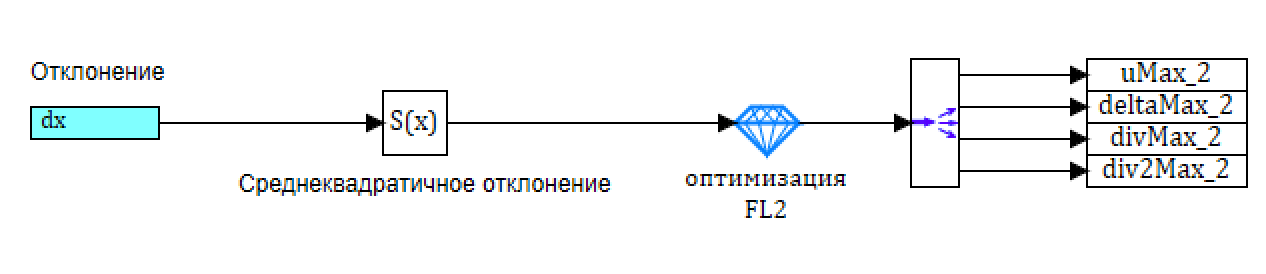
N , , 0, .
:
— uMax_2 – ;
— deltaMax_2 – ;
— divMax_2 – ;
— div2Max_2 – .
1 (. . 28)
1 , - , , 1 (. . 18 — 19) – , . . (. . 28)

28. .
: , . 29, – 30.
29. .

30. .
, . , . , .
, . .
:
sign, -1,0,1 , « », 1 . , , .
, .
, , 1.2 , .
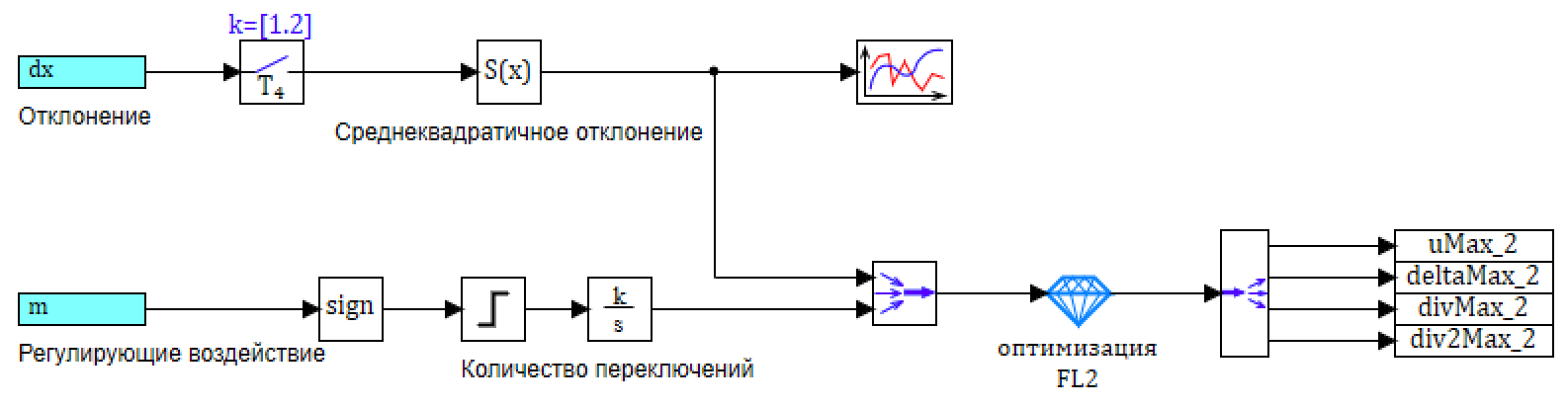
31. ee.
:
[]: « = [16.564415, 0.0027674129, 0.19085771, 50], = [0.0047956855, 11]» Macro5.OptimizeBlock6
, :
— uMax_2 – = 16.564;
— deltaMax_2 – = 0.00277;
— divMax_2 – = 0.191;
— div2Max_2 – = 50.
32.
, , , . 1, 2 , .
33. , , .
 33. 1 2.
33. 1 2.
, , , . . 34.
34. -.
2, , . - :

35. -.
:
, , .
...