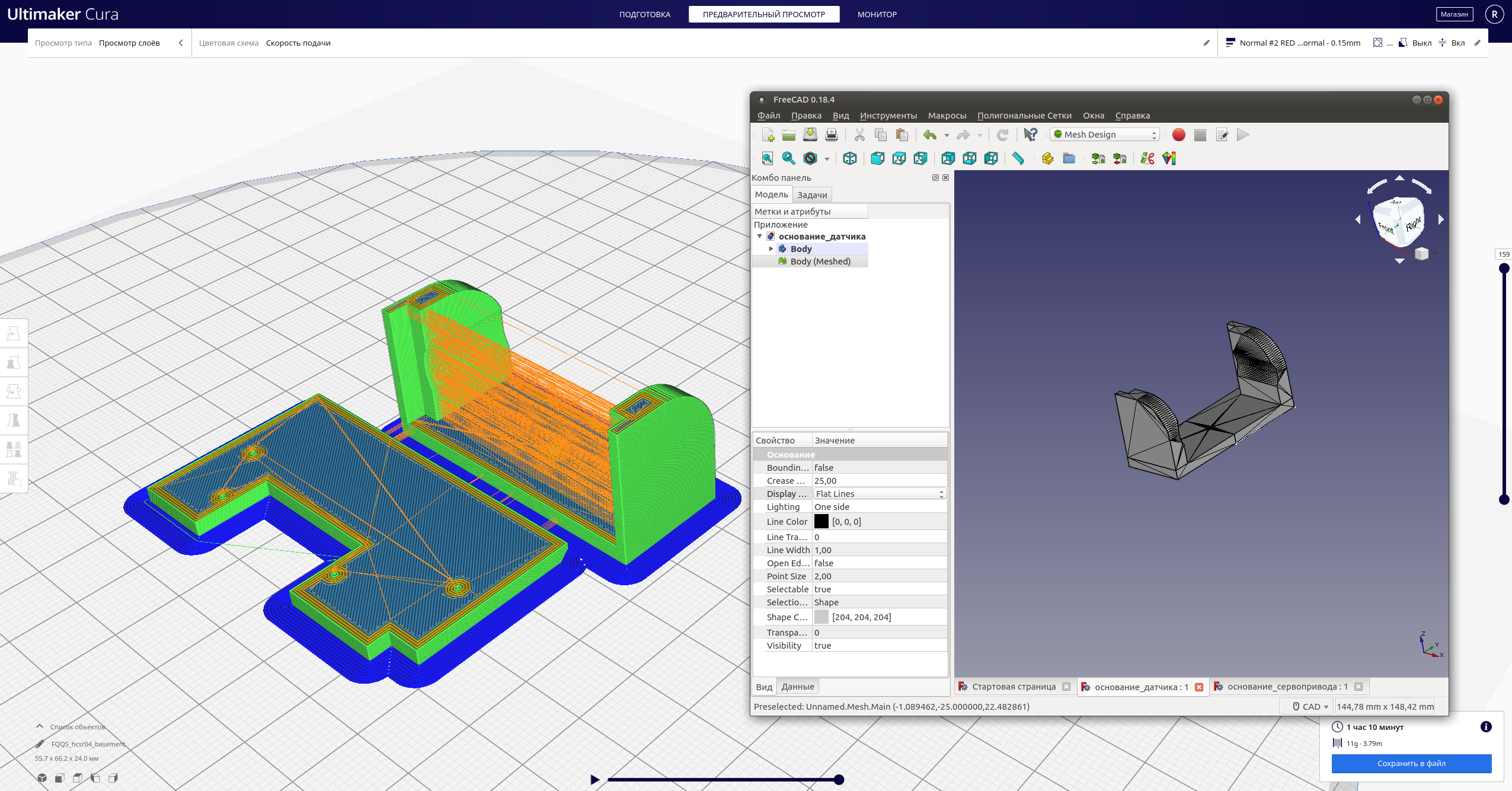
Halo, Habr!Artikel ini menjelaskan proses peningkatan platform self-propelled berdasarkan esp8266 MK dengan micropython , menjadi robot sederhana yang dilengkapi dengan sensor penghalang ultrasonik, LED yang berkedip, tombol start / stop, serta server web terintegrasi, sebagai bagian dari proyek pelatihan.KDPV: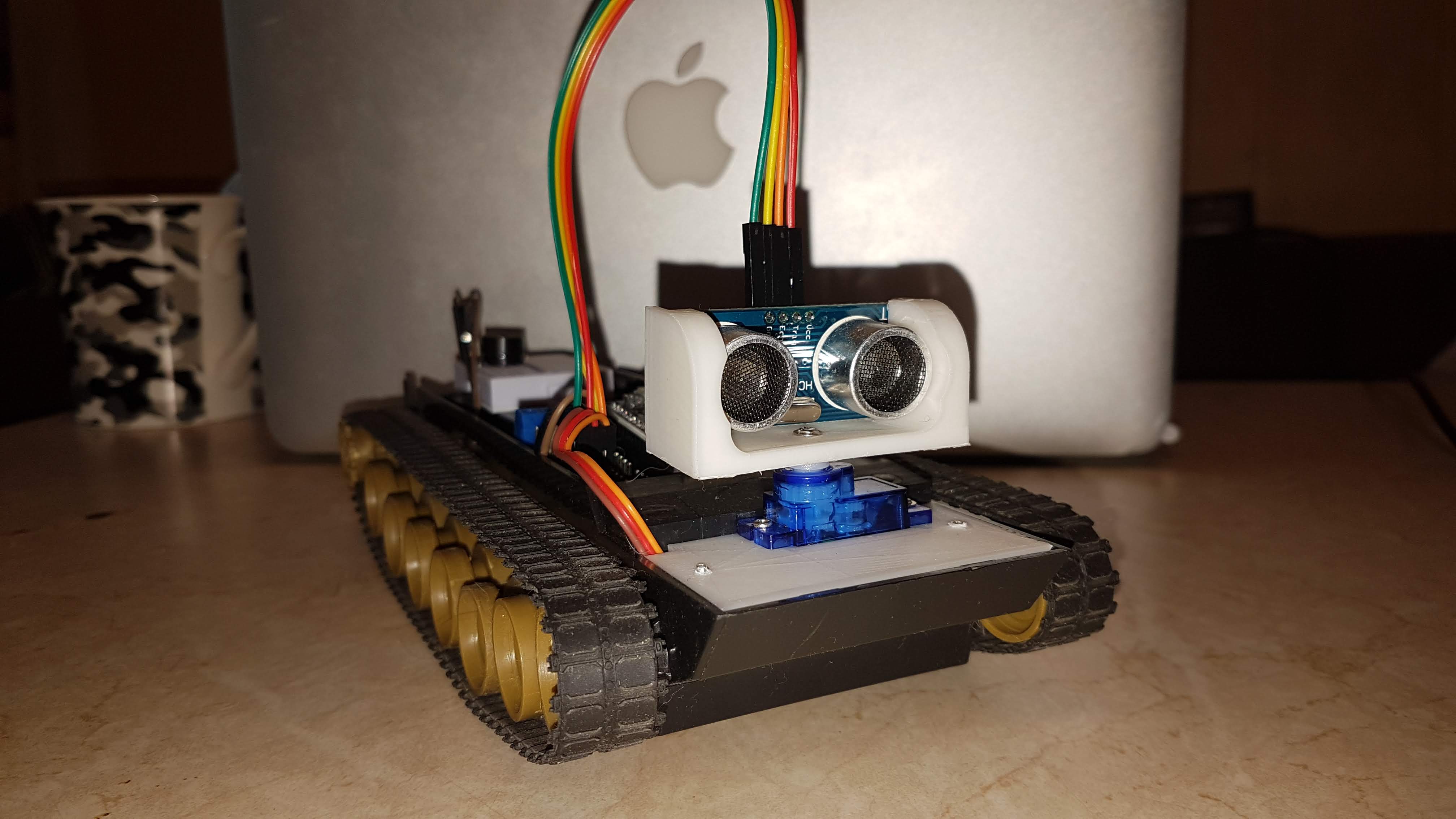 Jadi, dua bagian pertama menggambarkan pembuatan platform self-propelled yang dikendalikan melalui antarmuka web wifi.Tugas untuk tahap saat ini adalah untuk melengkapi platform ultrasound ini dengan sensor HC-SR04, dan menambahkan kemampuan untuk bekerja offline.Untuk mulai dengan - bagian mekanik:perlu untuk memperbaiki sensor dan servo dalam kasus ini, desain (saya menggunakan FreeCAD untuk ini ) dan membuat bagian-bagian yang hilang:
Jadi, dua bagian pertama menggambarkan pembuatan platform self-propelled yang dikendalikan melalui antarmuka web wifi.Tugas untuk tahap saat ini adalah untuk melengkapi platform ultrasound ini dengan sensor HC-SR04, dan menambahkan kemampuan untuk bekerja offline.Untuk mulai dengan - bagian mekanik:perlu untuk memperbaiki sensor dan servo dalam kasus ini, desain (saya menggunakan FreeCAD untuk ini ) dan membuat bagian-bagian yang hilang: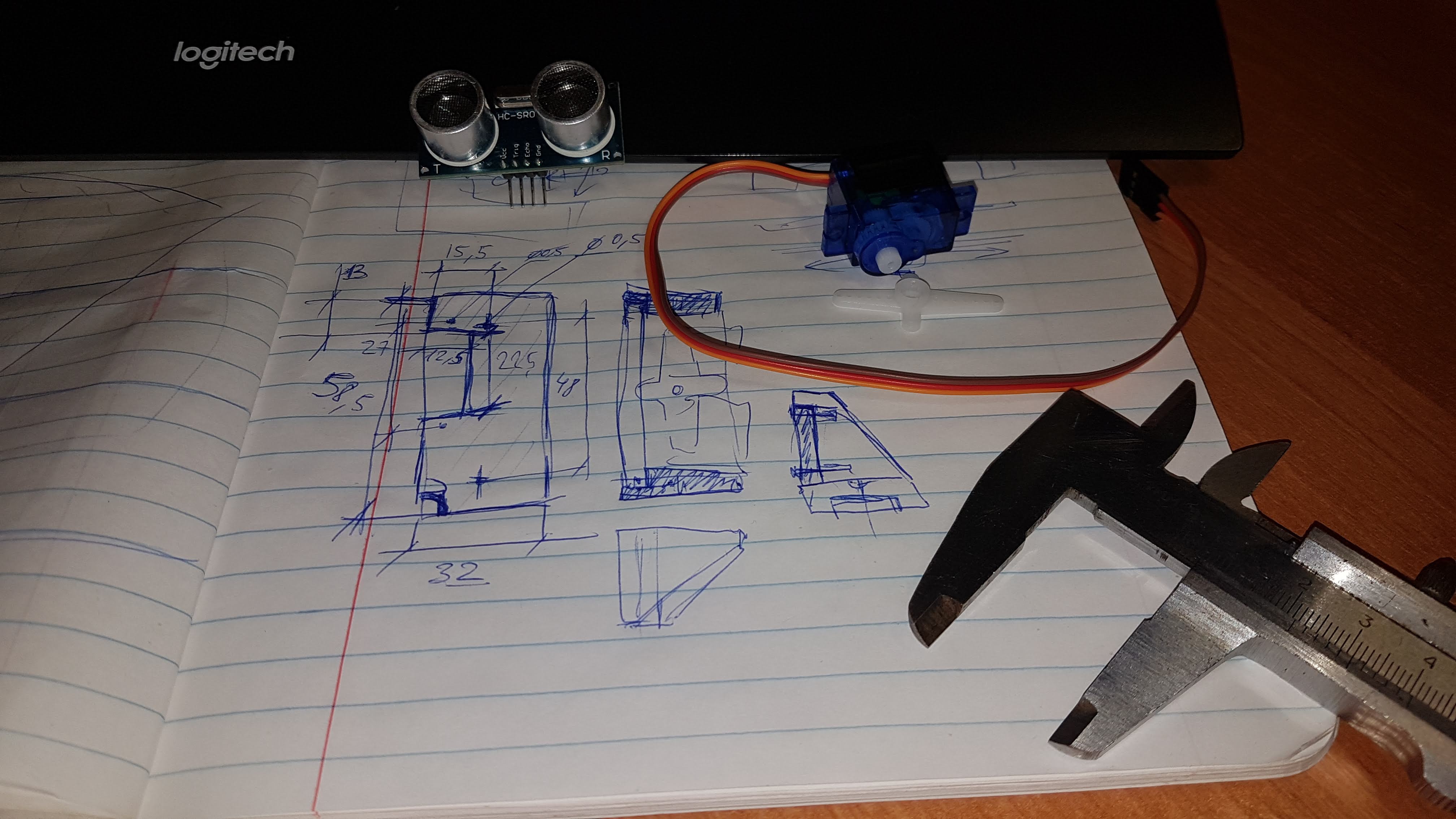
 Kemudian - yang listrik:menyusun sirkuit (misalnya, dalam Fritzing ) dan melakukan switching sesuai dengan itu:
Kemudian - yang listrik:menyusun sirkuit (misalnya, dalam Fritzing ) dan melakukan switching sesuai dengan itu: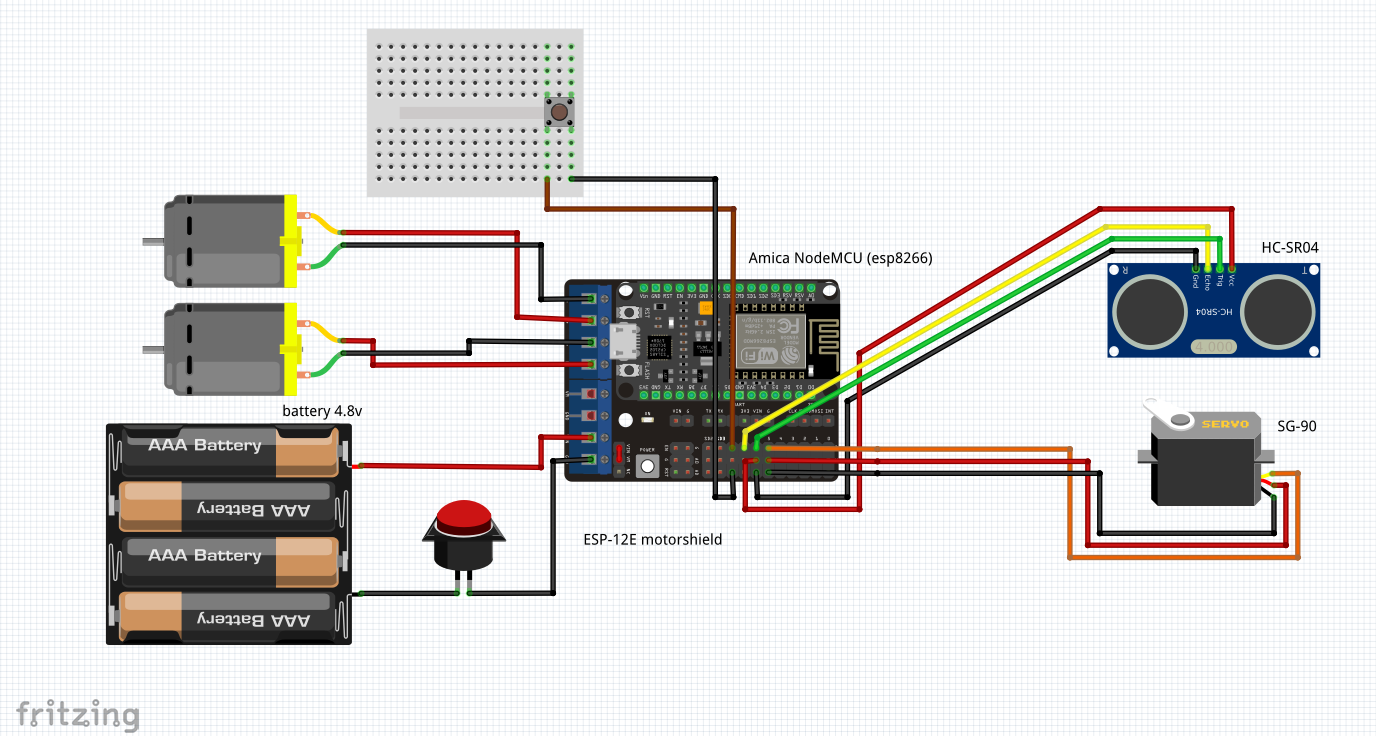 Setelah itu, coba buat semuanya terbang ...Karena saya ingin fungsi-fungsi tertentu dari program robot untuk dilakukan secara paralel (misalnya, proses pemindaian jarak ke rintangan dan fungsi gerakan), saya harus terjun ke kemampuan modul asyncio . Lebih rinci bekerja dengan asyncio dijelaskan dalam ini dan ini artikel.Misalnya, untuk mengedipkan LED, Anda dapat menerapkan coroutine tersebut, yang praktis tidak berbeda dengan sinkron:
Setelah itu, coba buat semuanya terbang ...Karena saya ingin fungsi-fungsi tertentu dari program robot untuk dilakukan secara paralel (misalnya, proses pemindaian jarak ke rintangan dan fungsi gerakan), saya harus terjun ke kemampuan modul asyncio . Lebih rinci bekerja dengan asyncio dijelaskan dalam ini dan ini artikel.Misalnya, untuk mengedipkan LED, Anda dapat menerapkan coroutine tersebut, yang praktis tidak berbeda dengan sinkron:import uasyncio as asyncio
from machine import Pin
syst_led = Pin(16, Pin.OUT)
async def blink_led(led, interval_ms):
led_val = True
while True:
led_val = not(led_val)
led_state = led.value(int(led_val))
await asyncio.sleep_ms(interval_ms)
loop = asyncio.get_event_loop()
loop.create_task(blink_led(syst_led, interval_ms=250))
loop.run_forever()
Perbedaannya adalah bahwa coroutine yang melakukan tugas yang berbeda dapat dijalankan beberapa sekaligus (sumber daya akan dialokasikan oleh penjadwal).Dengan demikian, kami akan menulis coroutine untuk mengukur jarak dan memindai suatu sektor, serta panggilan balik untuk interupsi perangkat keras (tombol) yang memulai atau berhenti memindai. Transfer negara antara coroutine dalam kasus paling sederhana dapat dilakukan melalui variabel global:Callback untuk tombol:from machine import Pin
run_flag = False
button = Pin(15, Pin.IN, Pin.PULL_UP)
def callback(p):
global run_flag
run_flag = not(run_flag)
print('set run_flag', run_flag, p)
button.irq(trigger=Pin.IRQ_FALLING, handler=callback)
Pengukuran jarak:import uasyncio as asyncio
from utime import sleep, sleep_us
from machine import Pin, time_pulse_us
trig=Pin(12, Pin.OUT)
echo=Pin(13, Pin.IN)
async def async_measure_range():
echo_timeout_us=500*2*30
trig.off()
sleep_us(5)
trig.on()
sleep_us(10)
trig.off()
try:
pulse_time = time_pulse_us(echo, 1, echo_timeout_us)
except:
pass
dist = (pulse_time / 2) / 29.1
return dist
Pemindaian sektor (dengan memanggil coroutine pengukuran jarak):import uasyncio as asyncio
from machine import Pin, PWM
pos_actual = 75
dist_cm = 50
p14 = Pin(14, Pin.OUT)
servo = PWM(p14, freq=50)
async def radar_scan(interval_ms):
pos_list = [45,75,105,75]
global pos_actual
global dist_cm
while True:
if run_flag:
for pos in pos_list:
servo.duty(pos)
await asyncio.sleep_ms(interval_ms)
dist_cm = await async_measure_range()
pos_actual = pos
print('pos_actual = %s, dist_cm = %s' % (pos_actual, dist_cm)
elif not run_flag:
await asyncio.sleep(0)
loop = asyncio.get_event_loop(
loop.create_task(radar_scan(interval_ms=250))
loop.run_forever()
Dalam proses debugging sensor, dari waktu ke waktu, memberikan nilai jarak negatif. Ternyata - "Elektronik adalah ilmu tentang kontak yang buruk" , ketika sensor diputar, kabel ditarik dan kontak terputus.Tetap kencangkan logika pilihan tindakan berdasarkan hasil pemindaian:avoid_left = False
avoid_right = False
avoid_backward = False
async def make_decision(interval_ms, avoid_limit_cm):
global avoid_left
global avoid_right
global avoid_backward
while True:
if run_flag:
if pos_actual == 45 and dist_cm < avoid_limit_cm :
avoid_left = True
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 45 and dist_cm >= avoid_limit_cm :
avoid_left = False
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 75 and dist_cm < avoid_limit_cm*1.25 :
avoid_backward = True
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 75 and dist_cm >= avoid_limit_cm*1.25 :
avoid_backward = False
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 105 and dist_cm < avoid_limit_cm :
avoid_right = True
if debug : print('avoid_right = %s' % avoid_right)
elif pos_actual == 105 and dist_cm >= avoid_limit_cm :
avoid_right = False
if debug : print('avoid_right = %s' % avoid_right)
if debug : print('pos = %s, dist_cm = %s' % (pos_actual,dist_cm))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
loop.create_task(make_decision(interval_ms=250, avoid_limit_cm=15))
Fungsi motorik:from random import getrandbits
async def moving(interval_ms):
while True:
if run_flag:
if avoid_backward :
print('avoid_backward = %s' % avoid_backward)
await backward(interval_ms*2)
if bool(getrandbits(1)) :
await right_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
else:
await left_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
elif avoid_left :
print('avoid_left = %s' % avoid_left)
await left_turn(interval_ms)
elif avoid_right :
print('avoid_right = %s' % avoid_right)
await right_turn(interval_ms)
else:
print('move_forward')
await forward(interval_ms)
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await stop_all()
await asyncio.sleep(0)
loop.create_task(moving(interval_ms=1000))
Dan kontrol motor
p5 = Pin(5, Pin.OUT)
p4 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
motor_L = PWM(p5, freq=1000, duty=0)
motor_R = PWM(p4, freq=1000, duty=0)
speed = 1023
async def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
async def forward(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def backward(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_rotate(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def left_rotate(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
await asyncio.sleep_ms(interval_ms)
async def left_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
Serta LED yang berkedip untuk mengontrol bahwa program ini bekerja:async def blink_led(led, interval_ms):
led_val = True
while True:
if run_flag:
led_val = not(led_val)
led_state = led.value(int(led_val))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
loop.create_task(blink_led(syst_led, interval_ms=250))
Setelah itu, tinggal mengumpulkan semua iniutuhimport gc
import uasyncio as asyncio
from utime import sleep, sleep_us
from machine import Pin, PWM, time_pulse_us
from random import getrandbits
p5 = Pin(5, Pin.OUT)
p4 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
motor_L = PWM(p5, freq=1000, duty=0)
motor_R = PWM(p4, freq=1000, duty=0)
speed = 1023
p14 = Pin(14, Pin.OUT)
servo = PWM(p14, freq=50)
button = Pin(15, Pin.IN, Pin.PULL_UP)
syst_led = Pin(16, Pin.OUT)
trig=Pin(12, Pin.OUT)
echo=Pin(13, Pin.IN)
run_flag = False
avoid_left = False
avoid_right = False
avoid_backward = False
pos_actual = 75
dist_cm = 50
debug = False
def callback(p):
global run_flag
run_flag = not(run_flag)
print('set run_flag', run_flag, p)
def stop_all_sync():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
async def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
async def forward(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def backward(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_rotate(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def left_rotate(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
await asyncio.sleep_ms(interval_ms)
async def left_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def moving(interval_ms):
while True:
if run_flag:
if avoid_backward :
print('avoid_backward = %s' % avoid_backward)
await backward(interval_ms*2)
if bool(getrandbits(1)) :
await right_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
else:
await left_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
elif avoid_left :
print('avoid_left = %s' % avoid_left)
await left_turn(interval_ms)
elif avoid_right :
print('avoid_right = %s' % avoid_right)
await right_turn(interval_ms)
else:
print('move_forward')
await forward(interval_ms)
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await stop_all()
await asyncio.sleep(0)
async def blink_led(led, interval_ms):
led_val = True
while True:
if run_flag:
led_val = not(led_val)
led_state = led.value(int(led_val))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
async def async_measure_range():
echo_timeout_us=500*2*30
trig.off()
sleep_us(5)
trig.on()
sleep_us(10)
trig.off()
try:
pulse_time = time_pulse_us(echo, 1, echo_timeout_us)
except:
pass
dist = (pulse_time / 2) / 29.1
return dist
async def make_decision(interval_ms, avoid_limit_cm):
global avoid_left
global avoid_right
global avoid_backward
while True:
if run_flag:
if pos_actual == 45 and dist_cm < avoid_limit_cm :
avoid_left = True
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 45 and dist_cm >= avoid_limit_cm :
avoid_left = False
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 75 and dist_cm < avoid_limit_cm*1.25 :
avoid_backward = True
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 75 and dist_cm >= avoid_limit_cm*1.25 :
avoid_backward = False
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 105 and dist_cm < avoid_limit_cm :
avoid_right = True
if debug : print('avoid_right = %s' % avoid_right)
elif pos_actual == 105 and dist_cm >= avoid_limit_cm :
avoid_right = False
if debug : print('avoid_right = %s' % avoid_right)
if debug : print('pos = %s, dist_cm = %s' % (pos_actual,dist_cm))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
async def radar_scan(interval_ms):
pos_list = [45,75,105,75]
global pos_actual
global dist_cm
while True:
if run_flag:
for pos in pos_list:
servo.duty(pos)
await asyncio.sleep_ms(interval_ms)
dist_cm = await async_measure_range()
pos_actual = pos
elif not run_flag:
await asyncio.sleep(0)
stop_all_sync()
print('Move sensor to initial position...')
servo.duty(75)
sleep(1)
print('Waiting for start button...')
gc.enable()
button.irq(trigger=Pin.IRQ_FALLING, handler=callback)
loop = asyncio.get_event_loop()
loop.create_task(blink_led(syst_led, interval_ms=250))
loop.create_task(radar_scan(interval_ms=250))
loop.create_task(make_decision(interval_ms=250, avoid_limit_cm=15))
loop.create_task(moving(interval_ms=1000))
loop.run_forever()
dan check in kerja:Namun, saya ingin menjaga kemungkinan kontrol manual melalui halaman web ...Untuk ini, di coroutine terpisah, tambahkan server web sederhana:async def web_page(request):
global auto_run_flag
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
auto_run_flag = False
forward_sync()
elif request.find('GET /?left_rotate') > 0:
motor_state="Rotate Left"
auto_run_flag = False
left_rotate_sync()
elif request.find('GET /?right_rotate') > 0:
motor_state="Rotate Right"
auto_run_flag = False
right_rotate_sync()
elif request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
auto_run_flag = False
left_turn_sync()
elif request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
auto_run_flag = False
right_turn_sync()
elif request.find('GET /?backward') > 0:
motor_state="Going Backward"
auto_run_flag = False
backward_sync()
elif request.find('GET /?stop') > 0:
motor_state="Stopped"
auto_run_flag = False
stop_all_sync()
elif request.find('GET /?auto') > 0:
auto_run_flag = not auto_run_flag
if auto_run_flag :
motor_state="Autopilot"
elif not auto_run_flag :
motor_state="Stopped"
stop_all_sync()
html = """<html><head><title>RoboTank WEB</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="data:,"> <style>
html{font-family: Helvetica; display:inline-block; margin: 0px auto; text-align: center;}
h1{color: #0F3376; padding: 2vh;}p{font-size: 1.5rem;}
.button{display: inline-block; background-color: #33c080; border: none;
border-radius: 4px; color: white; text-decoration: none; font-size: 30px; width:100%}
.button2{background-color: #4286f4; width:30%}
.button3{background-color: #eb2b10; width:35%}
.button4{background-color: #8386f4; width:44%}
</style></head>
<body> <h1>RoboTank WEB</h1>
<p>Status : <strong>""" + motor_state + """</strong></p>
<p><a href='/?forward'><button class="button">Forward</button></a></p>
<p><a href='/?left_turn'><button class="button button2">LEFT</button></a>
<a href='/?stop'><button class="button button3">STOP</button></a>
<a href='/?right_turn'><button class="button button2">RIGHT</button></a>
<p><a href='/?backward'><button class="button">Backward</button></a></p>
<p><a href='/?left_rotate'><button class="button button4">L-rotate</button></a>
<a href='/?right_rotate'><button class="button button4">R-rotate</button></a></p>
<p><a href='/?auto'><button class="button button3">AUTO</button></a></p>
</body></html>"""
return html
async def web_handler(reader, writer):
try:
request = str(await reader.read(1024))
header = """HTTP/1.1 200 OK\nContent-Type: text/html\nConnection: close\n\n"""
response = await web_page(request)
await writer.awrite(header)
await writer.awrite(response)
await writer.aclose()
print("Finished processing request")
except Exception as e:
print(e)
async def tcp_server(host, port):
server = await asyncio.start_server(web_handler, host, port)
loop.create_task(tcp_server('0.0.0.0', 80))
Dan fungsi gerak sinkron untuk kontrol manual.def stop_all_sync():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward_sync():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward_sync():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_rotate_sync():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left_rotate_sync():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn_sync():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn_sync():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
Tampilan antarmuka: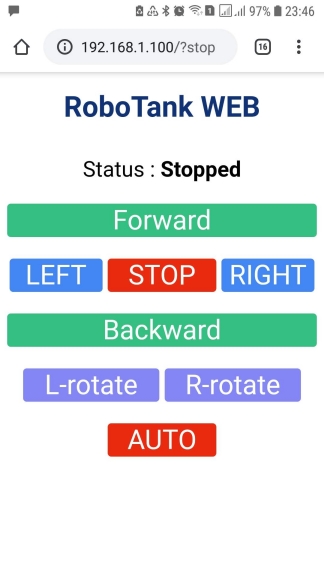 Tes versi final:Sumber tersedia di sini.Sumber inspirasi:docs.micropython.org/en/latest/library/uasyncio.htmlhabr.com/en/post/484446habr.com/en/post/337420habr.com/en/post/484472github.com/peterhinch /micropython-async/blob/master/TUTORIAL.mdgithub.com/rsc1975/micropython-hcsr04medium.com/@pgjones/an-asyncio-socket-tutorial-5e6f3308b8b0b
Tes versi final:Sumber tersedia di sini.Sumber inspirasi:docs.micropython.org/en/latest/library/uasyncio.htmlhabr.com/en/post/484446habr.com/en/post/337420habr.com/en/post/484472github.com/peterhinch /micropython-async/blob/master/TUTORIAL.mdgithub.com/rsc1975/micropython-hcsr04medium.com/@pgjones/an-asyncio-socket-tutorial-5e6f3308b8b0b