Halo, Habr!Artikel ini menjelaskan tentang penderitaan seorang pemula dalam proses pembuatan platform platform self-propelled berdasarkan esp8266 MK dengan micropython , yang dikelola melalui server web terintegrasi.KDPV: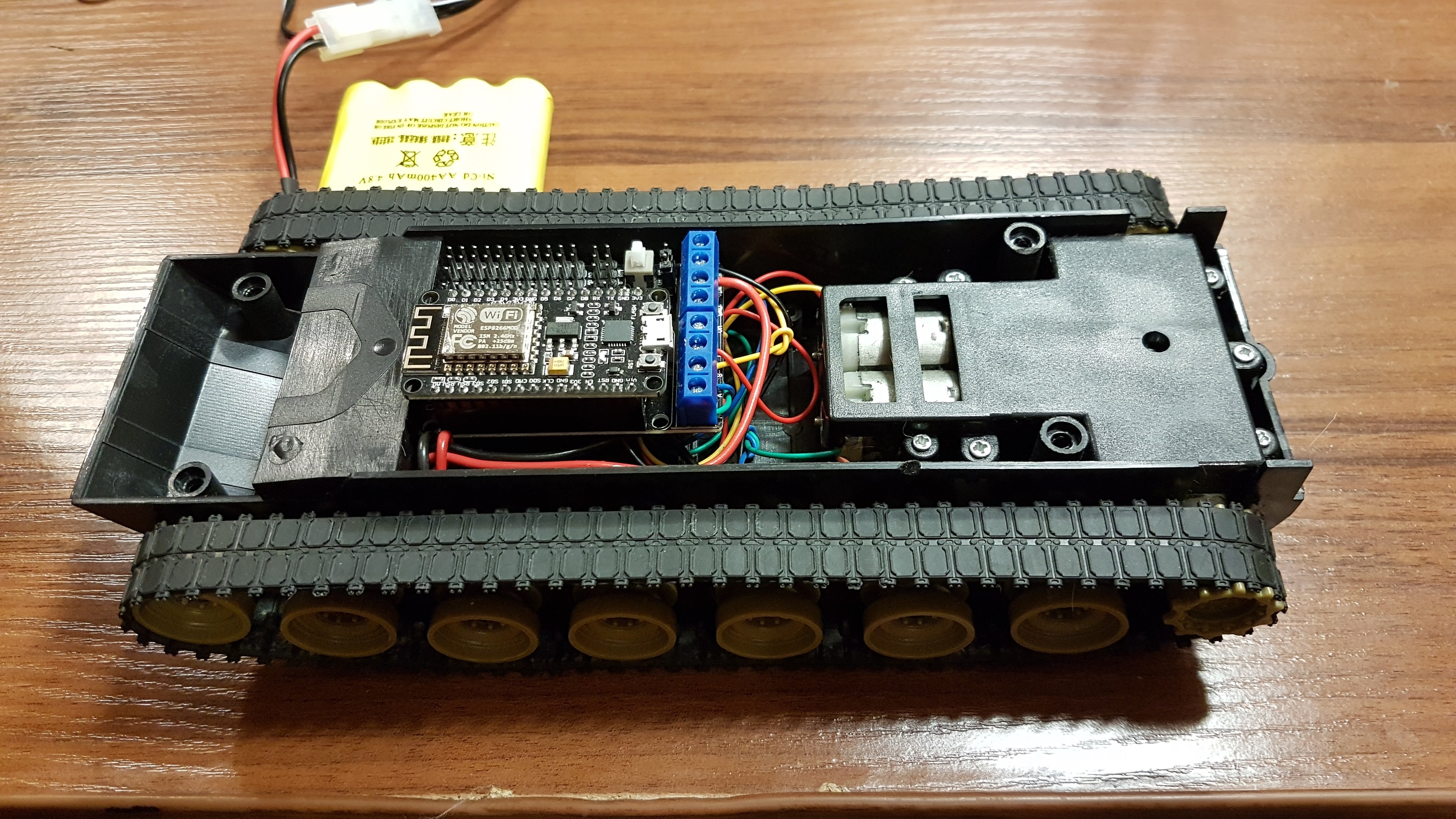 Seperti yang saya sebutkan di artikel pertama , proyek ini mendidik, jadi tolong jangan menilai dengan ketat.Jadi, tugas tahap pertama adalah membuat platform ulat yang dapat dikontrol melalui wi-fi.Mengapa di tempat sampah, sebuah tangki mainan tua ditemukan, dan MK esp8266 (ESP-12E) dan seorang pengemudi motor untuk itu juga dibeli.
Seperti yang saya sebutkan di artikel pertama , proyek ini mendidik, jadi tolong jangan menilai dengan ketat.Jadi, tugas tahap pertama adalah membuat platform ulat yang dapat dikontrol melalui wi-fi.Mengapa di tempat sampah, sebuah tangki mainan tua ditemukan, dan MK esp8266 (ESP-12E) dan seorang pengemudi motor untuk itu juga dibeli.esp8266 dan perakitan motorshield Selanjutnya, semua hal di atas dikumpulkan sesuai dengan skema: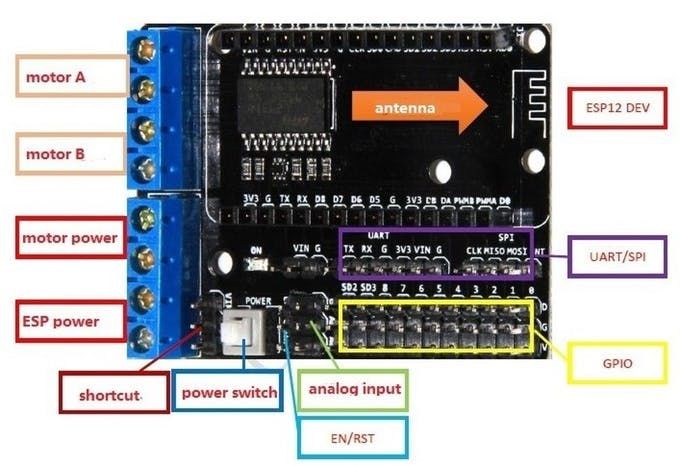 Dan setelah
Dan setelah beberapa hari studi singkat tentang dokumentasi , menjadi jelas bagaimana mengendalikan motor:from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
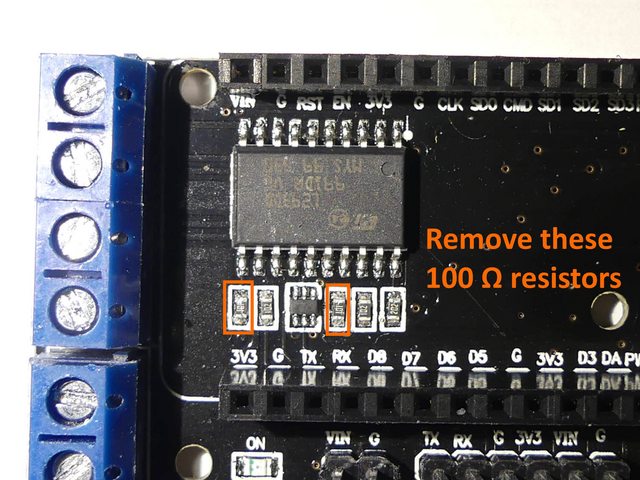
Jadi, pin5 dan pin4 - memungkinkan Anda untuk mengatur kecepatan putaran motor melalui PWM, dan pin0 dan pin2 - mengendalikan kebalikan untuk output "A" dan "B", masing-masing. Selain itu, karena LED juga terhubung ke pin2 di papan saya, maka kami mengamati efek cahaya bersamaan dengan gerakan :)Namun, itu tidak langsung lepas landas ...Google pada topik yang diberikan mengarah ke forum di mana ada rekomendasi untuk menghapus dua resistor "ekstra", yang dilakukan. Kutipan dari sana:Saya mengukur resistor ini, pada input ke L293DD, resistansi adalah 1K, tetapi mereka memiliki resistansi hanya 100 ohm ke ground. Ini berarti bahwa sinyal input dari pengontrol NodeMCU tidak dapat mencapai L293DD. Saya benar-benar tidak tahu mengapa mereka ada di sana - L293DD dapat memproses hingga 7 V pada inputnya, dan NodeMCU memberikan output 3,3 V.
Saya menghapus dua 100 Ohm resistor ini (yang pertama dan ketiga di sebelah kiri ketika antena di kanan), dan sekarang Perisai bekerja.
 Setelah itu, segalanya berjalan lancar, dan
Setelah itu, segalanya berjalan lancar, danversi terakhir dari kode
import network
import socket
from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
""" function for connecting to your local WiFi network """
def do_connect():
essid = 'home_wifi'
password = '12345678'
sta_if = network.WLAN(network.STA_IF)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect(essid, password)
while not sta_if.isconnected():
pass
print('network config:', sta_if.ifconfig())
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
def web_page(request):
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
forward()
if request.find('GET /?left') > 0:
motor_state="Rotate Left"
left()
if request.find('GET /?right') > 0:
motor_state="Rotate Right"
right()
if request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
left_turn()
if request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
right_turn()
if request.find('GET /?backward') > 0:
motor_state="Going Backward"
backward()
if request.find('GET /?stop') > 0:
motor_state="Stopped"
stop_all()
html = """<html><head><title>RoboTank WEB</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="data:,"> <style>
html{font-family: Helvetica; display:inline-block; margin: 0px auto; text-align: center;}
h1{color: #0F3376; padding: 2vh;}p{font-size: 1.5rem;}
.button{display: inline-block; background-color: #33c080; border: none;
border-radius: 4px; color: white; text-decoration: none; font-size: 30px; width:100%}
.button2{background-color: #4286f4; width:30%}
.button3{background-color: #eb2b10; width:35%}
.button4{background-color: #8386f4; width:44%}
</style></head>
<body> <h1>RoboTank WEB</h1>
<p>Status : <strong>""" + motor_state + """</strong></p>
<p><a href='/?forward'><button class="button">Forward</button></a></p>
<p><a href='/?left_turn'><button class="button button2">LEFT</button></a>
<a href='/?stop'><button class="button button3">STOP</button></a>
<a href='/?right_turn'><button class="button button2">RIGHT</button></a>
<p><a href='/?backward'><button class="button">Backward</button></a></p>
<p><a href='/?left'><button class="button button4">L-rotate</button></a>
<a href='/?right'><button class="button button4">R-rotate</button></a></p>
</body></html>"""
return html
stop_all()
do_connect()
addr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]
s = socket.socket()
try:
s.bind(addr)
s.listen(1)
except:
s.close()
s.bind(addr)
s.listen(1)
while True:
conn, addr = s.accept()
print('Got a connection from %s' % str(addr))
request = conn.recv(1024)
request = str(request)
print('The Content = %s' % request)
response = web_page(request)
conn.send('HTTP/1.1 200 OK\n')
conn.send('Content-Type: text/html\n')
conn.send('Connection: close\n\n')
conn.sendall(response)
conn.close()
Ternyata cukup efisien, dan berhasil menyelesaikan tugas yang ditetapkan pada tahap pertama.Pokatushki pertama:Bagian pertama (Instalasi micropython pada ESP8266 dan bekerja dengan itu di Linux)Bagian berikutnya (Robot sederhana pada MK esp8266 dengan micropython)Sumber inspirasi:funprojects.blog/2019/02/12/micropython-air-boatwww.instructables.com/id / sederhana-Wifi-Mobil-Menggunakan-ESP8266-Motorshieldforum.micropython.org/viewtopic.php?t=3977randomnerdtutorials.com/esp32-esp8266-micropython-web-serverdocs.micropython.org/en/latest/esp8266/ tutorial / index.html