ROS: Didedikasikan untuk mereka yang terjebak di Gazebo ... Platform untuk robot untuk 28.000 rubel
Instruksi perakitan untuk platform robot untuk mempelajari ROS dengan daya dukung lebih dari 30 kg
ROS adalah sistem operasi meta (open source) untuk robot. Ini telah menjadi standar industri. Memiliki antarmuka perpesanan yang siap pakai antara berbagai node sistem Anda dan sejumlah besar solusi siap pakai untuk berbagai komponen, sangat mudah untuk membuat robot Anda.Untuk ROS ada lingkungan simulator Gazebo, mis. Anda dapat memprogram robot tanpa harus secara fisik. Kenalan pertama dengan ROS menyenangkan bagi mayoritas, Anda menerbitkan dan membaca topik, mencoba mengelola turtlesim. Dan kemudian mungkin ada masalah dengan transisi ke robot berfungsi penuh yang berinteraksi dengan lingkungan. Beberapa bagian melangkah lebih jauh dan menciptakan robot yang diperlukan dalam simulator. Banyak yang terjebak di gazebo, saya persembahkan pos ini untuk mereka.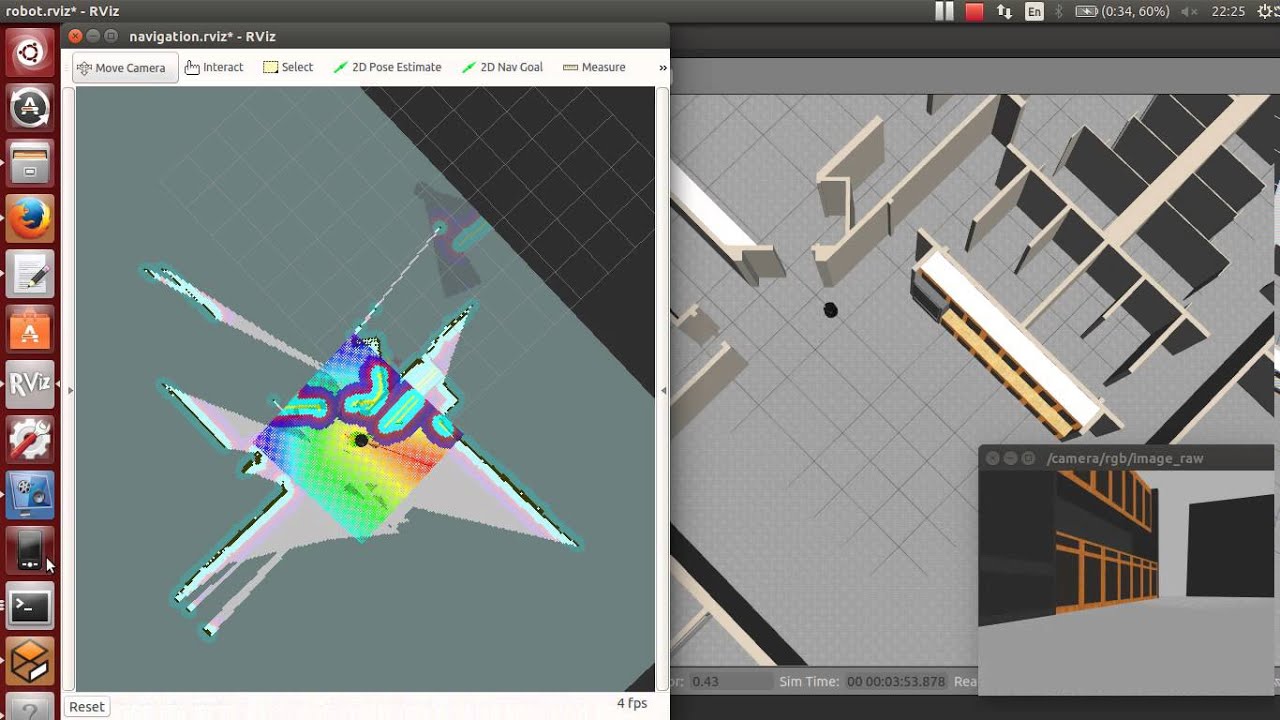 Setelah menerbitkan habr.com tentang robot dan robot, pelanggan menghubungi saya dengan kebutuhan untuk mengembangkan solusi robot. Tugas yang menarik adalah mengatur navigasi robot logistik dengan memperoleh tujuan global dari sistem manajemen gudang (WMS) yang ada. Pelanggan sendiri mengembangkan mekanisme gerobak, tetapi untuk dapat bekerja pada perangkat lunak secara paralel, diperlukan platform yang dapat mensimulasikan pergerakan barang. Selain itu , menguji algoritme robot kami dalam kondisi musim dingin yang keras dan hujan, kami membutuhkan platform dalam ruangan. Persyaratan minimum peralatan dibuat:
Setelah menerbitkan habr.com tentang robot dan robot, pelanggan menghubungi saya dengan kebutuhan untuk mengembangkan solusi robot. Tugas yang menarik adalah mengatur navigasi robot logistik dengan memperoleh tujuan global dari sistem manajemen gudang (WMS) yang ada. Pelanggan sendiri mengembangkan mekanisme gerobak, tetapi untuk dapat bekerja pada perangkat lunak secara paralel, diperlukan platform yang dapat mensimulasikan pergerakan barang. Selain itu , menguji algoritme robot kami dalam kondisi musim dingin yang keras dan hujan, kami membutuhkan platform dalam ruangan. Persyaratan minimum peralatan dibuat:- Platform dengan 2 roda
- Kapasitas angkut tidak kurang dari 30 kg.
- Lidar RPlidar A1
- Raspberry Pi Komputer Papan Tunggal
- Platform Arduino Mega
- Sonar
Pikiran pertama adalah menggunakan platform yang sudah jadi. Kami menghargai pasar untuk solusi ROS serupa. TurtleBot3 Burger dan robot di Neato tidak cocok untuk kita, karena ingin mensimulasikan pengiriman kotak.Setelah mengumpulkan data ini, keputusan yang dibuat dengan tekad kuat dibuat untuk membangun platform. Kami telah mengumpulkan platform anggaran maksimum, saya memposting instruksi perakitan, mungkin itu akan berguna bagi seseorang.Ukuran case 320 * 620 * 195mmTubuh akan diproduksi oleh penggilingan CNC dari bahan komposit. Siapa yang butuh file untuk memotong, menulis saya email, di akhir posting.Saat memotong disediakan slot untuk menekuk tempat. Perakitan di sudut.Roda 10 BLDC, driver roda, baterai, dan pengisian daya diambil dari giroskop. Anda dapat membeli yang baru untuk ini, dalam hal apa pun itu akan lebih murah daripada bagian yang sesuai secara terpisah.Kami memperbaiki roda ke kasing menggunakan bagian yang dicetak https://www.thingiverse.com/thing:990353Papan gyroscope perlu dicerminkan. Saya menggunakan firmware inigithub.com/NiklasFauth/hoverboard-firmware-hack , ada variasi. Ada kompiler online di Internet.Sebagai dasar untuk navigasi, kami akan menggunakan odometry dari roda dan Rplidar A1.Sebagai komputer, Raspberry Pi sebagai solusi anggaran populer, kami memikirkan versi dengan jetsoin nano.Karena lidar membutuhkan hingga 1A, Raspberry Pi hingga 2A, Arduino memutuskan untuk memasok pembagi USB dengan catu daya terpisah melalui konverter step-down dari baterai utama.


 ROS Master terletak di komputer terpisah, karena kami berencana untuk menambahkan kamera realsense.Sebagian besar node berjalan di komputer master:
ROS Master terletak di komputer terpisah, karena kami berencana untuk menambahkan kamera realsense.Sebagian besar node berjalan di komputer master:- simpul untuk mendapatkan koordinat target saat ini dari pangkalan
- kegembiraan
- move_base
- dll
- gmapping
Bagian dari node di bajak:- rosserial_arduino
- rplidar_ros
Robot ini memiliki setiap kesempatan untuk menjadi proyek komersial yang terpisah.Masih banyak pekerjaan:- perlu membuat model urdf
- mengembangkan skenario penggunaan platform
- pertimbangkan kompatibilitas dengan peralatan lain
- konfigurasikan pekerjaan beberapa robot secara bersamaan
Opsi tempat tinggal lainnya Jika Anda ingin membeli kit ini dengan biaya komponen atau ingin menjadi bagian dari proyek dan mengembangkan produk ini bersama kami, tulis saya https://forms.yandex.ru/u/5e3d0be770f10402303acf87/Source: https://habr.com/ru/post/undefined/
All Articles