इस परियोजना का निर्माण एक अन्य प्रसिद्ध परियोजना के आधार पर किया गया था, इसके मंडल में - linorobot (linorobot.org), एक साधारण लेमनर के लिए उपलब्ध घटकों का उपयोग करके। जो लक्ष्य निर्धारित किए गए थे: ख्रुश्चेव के संकीर्ण स्थानों में जाने के लिए नेविगेशन स्टैक को कॉन्फ़िगर करने के लिए, कम उद्देश्यों के लिए मिनी-पीसी के प्रदर्शन का मूल्यांकन करने के लिए कम लागत वाले घटकों का उपयोग करके घर पर रोबोट के स्वायत्त आंदोलन को प्राप्त करना।लोहा
ठोस पदार्थों में घटकों की सूची इस प्रकार है:- रास्पबेरी पाई 3 बी - 2800 आर ।;
- लिडार rplidar a1 - 7500 पी।;
- पावर ब्रिज l298n -2 पीसी - 400 रगड़ ।;
- टाइप ए और बी के एन्कोडर्स के साथ व्हीसेट - 2000 आर। (210 आरपीएम - लिंक )
- किशोर 3.2 - 2100 आर ।;
- imu 9250 (या तो 9150 या 6050) - 240 पी ।;
- 10000mH पर पावर बैंक - 1500 आर।
- 3 बैटरी 18650 और धारक -600 पी।
- स्टेप-डाउन कनवर्टर dc-dc c 5V से 3.3V - 20p।
- प्लाईवुड का एक टुकड़ा, लकड़ी की छत -? रगड़।
कुल: 17160 पी।* Arduino Mega 2560 (600 p।), और लिडार को टीनएज v.1 (1000 p।) के साथ बदल कर किशोर को कम किया जा सकता है: हालाँकि, यह ध्यान दिया जाना चाहिए कि पहले kinect में 0.5 m की न्यूनतम दृश्यता (अंधा क्षेत्र) है। जो तंग परिस्थितियों में नेविगेशन को नकारात्मक रूप से प्रभावित कर सकता है और यह भारी है। लिडार में 0.2 m से कम का अंधा क्षेत्र है। Kinect v.2 रास्पबेरी 3b फिट नहीं होगा (इसमें usb 3.0 नहीं है)। Arduino मेगा आकार (और कुछ विशेषताओं) में किशोर से नीच है, इसके अलावा, आपको कोड को थोड़ा फिर से काम करना होगा।सामान्य तौर पर, "डिज़ाइन" इस तरह दिखता है:
हालाँकि, यह ध्यान दिया जाना चाहिए कि पहले kinect में 0.5 m की न्यूनतम दृश्यता (अंधा क्षेत्र) है। जो तंग परिस्थितियों में नेविगेशन को नकारात्मक रूप से प्रभावित कर सकता है और यह भारी है। लिडार में 0.2 m से कम का अंधा क्षेत्र है। Kinect v.2 रास्पबेरी 3b फिट नहीं होगा (इसमें usb 3.0 नहीं है)। Arduino मेगा आकार (और कुछ विशेषताओं) में किशोर से नीच है, इसके अलावा, आपको कोड को थोड़ा फिर से काम करना होगा।सामान्य तौर पर, "डिज़ाइन" इस तरह दिखता है:
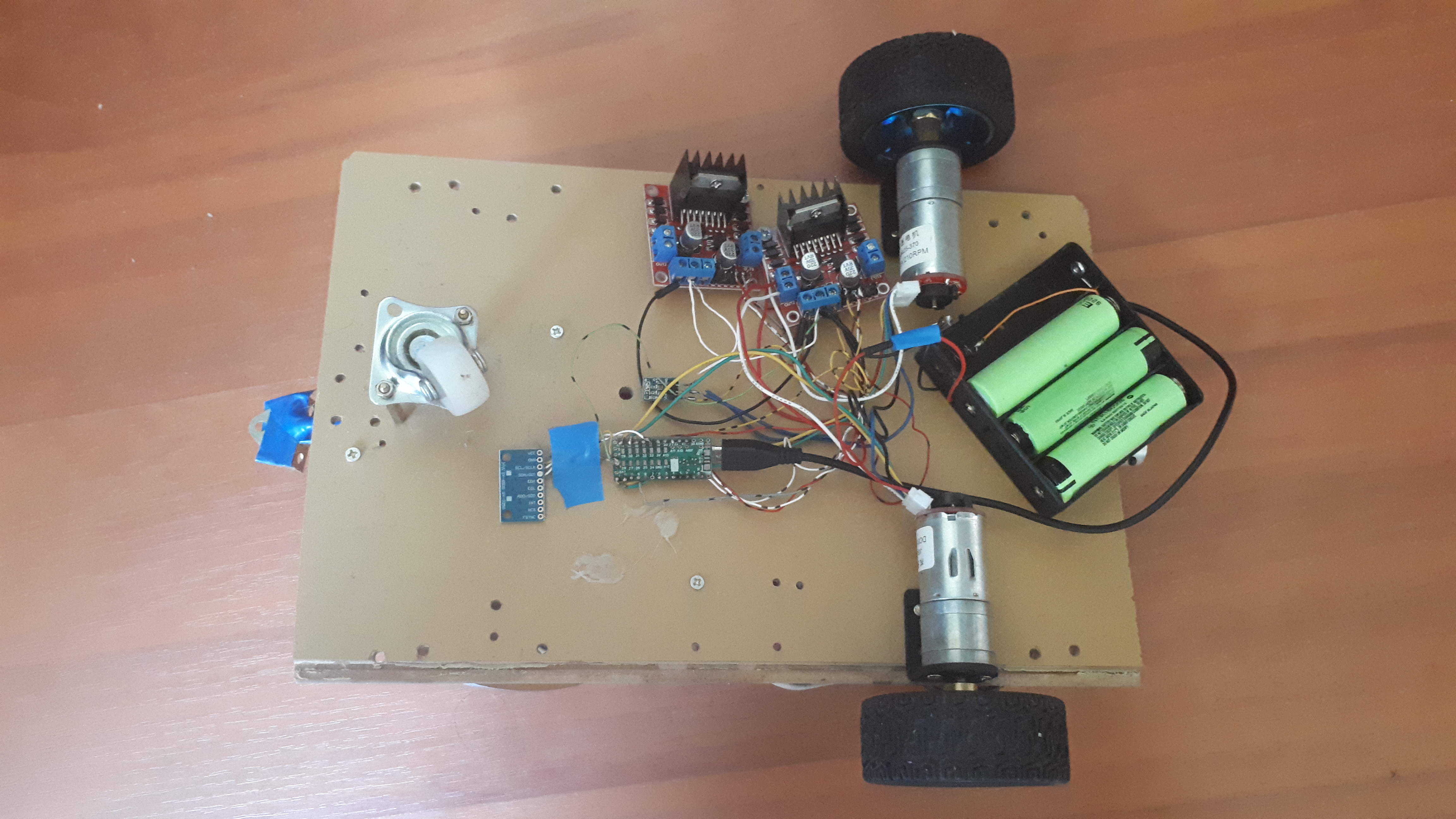 यहाँ कोई सुंदरता नहीं है, बेशक, लेकिन यह इसके बारे में नहीं है।रोबोट के अलावा, यह एक बाहरी पीसी के लिए अत्यधिक वांछनीय है, जिस पर रोबोट (आरवीज़, गज़ेबो) के कार्यों को देखने के लिए ग्राफिकल गोले लॉन्च किए जाएंगे।
यहाँ कोई सुंदरता नहीं है, बेशक, लेकिन यह इसके बारे में नहीं है।रोबोट के अलावा, यह एक बाहरी पीसी के लिए अत्यधिक वांछनीय है, जिस पर रोबोट (आरवीज़, गज़ेबो) के कार्यों को देखने के लिए ग्राफिकल गोले लॉन्च किए जाएंगे।रोबोट विधानसभा
यह प्रोजेक्ट वेबसाइट पर विस्तार से चित्रित किया गया है - एक लिंक , तो आइए हम उन बिंदुओं पर ध्यान केंद्रित करते हैं जो कठिनाइयों का कारण बनते हैं। पहले आपको यह विचार करने की आवश्यकता है कि पहियों पर एनकोडर 3.3V द्वारा संचालित हैं और, जब 5V लागू किया जाता है, तो पूरी तरह से विफल हो जाते हैं।लिनोरोबॉट इंस्टॉलेशन स्क्रिप्ट सफलतापूर्वक ubuntu 16.04, ubuntu 18.04 पर स्थापित की गई है। आरओएस संस्करण: आरओएस काइनेटिक या आरओएस मेलोडिक। रास्पबेरी 3 बी पर, आपको पहले एक स्वैप फ़ाइल बनाना होगा।मुख्य किशोर कोड रास्ते में है:roscd linorobot/teensy/firmware/lib/config
nano lino_base_config.h
और कमांड के साथ इसमें डाला:roscd linorobot/teensy/firmware
platformio run --target upload
आदेशों के उपरोक्त बंडलों का उपयोग अक्सर किया जाएगा, इसलिए यह उन्हें उपनाम में जोड़ने के लिए समझ में आता है।रोबोट को असेंबल करने में कठिनाइयों के कारण, l298n से किशोर तक जाने वाले जुड़े संपर्कों का सही सहसंबंध परेशानी भरा हो सकता है। अत्यंत स्पष्ट कनेक्शन आरेख के बावजूद, पहिए अलग-अलग व्यवहार कर सकते हैं और प्रयोग करना होगा, कोड में सही पिन असाइनमेंट का चयन करना होगा।मेरे मामले में, यह इस तरह निकला:/// ENCODER PINS
//MOTOR PINS
दूसरा बिंदु रोबोट पहियों के विनिर्देश को निर्धारित करना है://define your robot' specs here
#define MAX_RPM 210 // motor's maximum RPM
RPM व्हील स्पेसिफिकेशन में पाया जा सकता है, लेकिन CPR (COUNTS_PER_REV) परिकलित मान है।CPR = PPR x 4. हमारे पहियों काPPR 341। * PPR को या तो विनिर्देशन में देखा जा सकता है या कोड को roslaunch linorobot minimal.launch रोबोट पर चलाया जा सकता है और पहिया 360 डिग्री को स्पिन कर सकता है। PPR संख्यात्मक मान के बराबर होगा जो व्हील रोटेशन के बाद स्क्रीन पर प्रदर्शित होगा: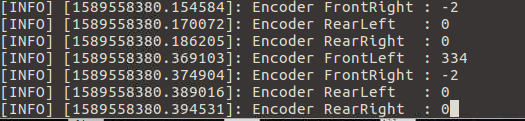 * PPR = abs (RECENT_COUNT - INITIAL_COUNT)।तो सीपीआर = 1364. आपको मीटर में WHEEL_DIAMETER और LR_WHEELS_DISTANCE भी सेट करनी होगी। इसके अलावा, LR_WHEELS_DISTANCE पहियों के केंद्रीय धुरों के बीच की दूरी है, और किनारे से किनारे तक नहीं है। यदि रोबोट दो-पहिया है, तो अंतर को नजरअंदाज नहीं किया जा सकता है।तीसरा बिंदु जो कठिनाइयों का कारण बन सकता है - imu अंशांकन। ऐसा करने के लिए, निर्देशों का पालन करते हुए, कुछ निश्चित स्थितियों में रोबोट को ठीक करना आवश्यक है। संकेत उस कोड में होंगे जब rosrun imu_calib do_calib स्क्रिप्ट निष्पादित करते हैं :
* PPR = abs (RECENT_COUNT - INITIAL_COUNT)।तो सीपीआर = 1364. आपको मीटर में WHEEL_DIAMETER और LR_WHEELS_DISTANCE भी सेट करनी होगी। इसके अलावा, LR_WHEELS_DISTANCE पहियों के केंद्रीय धुरों के बीच की दूरी है, और किनारे से किनारे तक नहीं है। यदि रोबोट दो-पहिया है, तो अंतर को नजरअंदाज नहीं किया जा सकता है।तीसरा बिंदु जो कठिनाइयों का कारण बन सकता है - imu अंशांकन। ऐसा करने के लिए, निर्देशों का पालन करते हुए, कुछ निश्चित स्थितियों में रोबोट को ठीक करना आवश्यक है। संकेत उस कोड में होंगे जब rosrun imu_calib do_calib स्क्रिप्ट निष्पादित करते हैं : पूरा होने के बाद सेटिंग्स के साथ imu_calib.yaml उत्पन्न होगा।इस तथ्य के बावजूद कि अंशांकन सेटिंग्स के साथ एक डिफ़ॉल्ट फ़ाइल है, अंशांकन करना बेहतर है।* इसके अलावा, यह पता चला है कि imu अंशांकन टेलीफ़ोन के माध्यम से रोबोट की गति की दिशा को प्रभावित कर सकता है (दाएं और इसके विपरीत बाएं, जबकि आंदोलन आगे और पीछे सही था)। कोड में पिनों को पुनर्व्यवस्थित करने से स्थिति हल नहीं हुई। Imu ही तय किया गया था और उल्टा कोष्ठक के साथ कैलिब्रेट किया गया था, जैसा कि रोबोट बेस के पीछे तय किया गया। उसके (imu) आगे के पुनरावृत्ति के बिना फ्लिप समस्या को हल किया।चौथा बिंदु - पिड अंशांकन।परियोजना की वेबसाइट पर, समायोजन को कैसे लागू किया जाए इसके लिए प्रक्रिया को विस्तार से वर्णित किया गया है - लिंक ।हालांकि, एक शुरुआती के लिए यह पता लगाना मुश्किल होगा कि यह क्या है और इसके साथ कैसे काम करना है। सामान्य तौर पर, यह सुनिश्चित करने के लिए पीआईडी विनियमन की आवश्यकता होती है कि रोबोट समान रूप से चलता है, बिना झटके / अचानक ब्रेक लगाना। इसके लिए तीन पैरामीटर जिम्मेदार हैं: p, i, d। उनके मूल्य किशोर को अपलोड किए गए मुख्य कोड में निहित हैं:
पूरा होने के बाद सेटिंग्स के साथ imu_calib.yaml उत्पन्न होगा।इस तथ्य के बावजूद कि अंशांकन सेटिंग्स के साथ एक डिफ़ॉल्ट फ़ाइल है, अंशांकन करना बेहतर है।* इसके अलावा, यह पता चला है कि imu अंशांकन टेलीफ़ोन के माध्यम से रोबोट की गति की दिशा को प्रभावित कर सकता है (दाएं और इसके विपरीत बाएं, जबकि आंदोलन आगे और पीछे सही था)। कोड में पिनों को पुनर्व्यवस्थित करने से स्थिति हल नहीं हुई। Imu ही तय किया गया था और उल्टा कोष्ठक के साथ कैलिब्रेट किया गया था, जैसा कि रोबोट बेस के पीछे तय किया गया। उसके (imu) आगे के पुनरावृत्ति के बिना फ्लिप समस्या को हल किया।चौथा बिंदु - पिड अंशांकन।परियोजना की वेबसाइट पर, समायोजन को कैसे लागू किया जाए इसके लिए प्रक्रिया को विस्तार से वर्णित किया गया है - लिंक ।हालांकि, एक शुरुआती के लिए यह पता लगाना मुश्किल होगा कि यह क्या है और इसके साथ कैसे काम करना है। सामान्य तौर पर, यह सुनिश्चित करने के लिए पीआईडी विनियमन की आवश्यकता होती है कि रोबोट समान रूप से चलता है, बिना झटके / अचानक ब्रेक लगाना। इसके लिए तीन पैरामीटर जिम्मेदार हैं: p, i, d। उनके मूल्य किशोर को अपलोड किए गए मुख्य कोड में निहित हैं:
आप रोबोट पर चलाकर उनके साथ प्रयोग कर सकते हैं:roslaunch linorobot minimal.launch
तीन अलग-अलग टर्मिनलों में बाहरी पीसी पर आगे:rosrun lino_pid pid_configure
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
rqt
स्लाइडर्स p, d, i को rqt टर्मिनल में ले जाकर, और फिर teleop_twist_keyboard टर्मिनल में रोबोट को नियंत्रित करके, आप हर बार टीनएज में नए pid मापदंडों के साथ कोड डाउनलोड किए बिना आवश्यक परिणाम प्राप्त कर सकते हैं , अर्थात, सब कुछ मक्खी पर होता है और उस समय फर्मवेयर में होता है। किशोर का पूरी तरह से अलग अर्थ हो सकता है। * आप चार्ट पर ध्यान केंद्रित नहीं कर सकते, क्योंकि नेत्रहीन, और इसलिए यह समझा जाएगा कि रोबोट कैसे यात्रा कर रहा है।वे मान p = 1.0, d = 0.1, i = 0.1 निर्धारित करने के साथ शुरू करने की सलाह देते हैं। हमारे मामले में, मान निम्नानुसार हैं (प्रयोगात्मक रूप से प्राप्त) p = 2.0, i = 0.3, d = 0.1।इसके बाद, इन मूल्यों को कोड में सेट किया जाना चाहिए और किशोर में भरा जाना चाहिए।इसके अलावा, कोड (DEBUG 0 के बजाय DEBUG 1) में सेट करना न भूलें:
, अर्थात, सब कुछ मक्खी पर होता है और उस समय फर्मवेयर में होता है। किशोर का पूरी तरह से अलग अर्थ हो सकता है। * आप चार्ट पर ध्यान केंद्रित नहीं कर सकते, क्योंकि नेत्रहीन, और इसलिए यह समझा जाएगा कि रोबोट कैसे यात्रा कर रहा है।वे मान p = 1.0, d = 0.1, i = 0.1 निर्धारित करने के साथ शुरू करने की सलाह देते हैं। हमारे मामले में, मान निम्नानुसार हैं (प्रयोगात्मक रूप से प्राप्त) p = 2.0, i = 0.3, d = 0.1।इसके बाद, इन मूल्यों को कोड में सेट किया जाना चाहिए और किशोर में भरा जाना चाहिए।इसके अलावा, कोड (DEBUG 0 के बजाय DEBUG 1) में सेट करना न भूलें:
Odometry
रोबोट के उन्मुखीकरण और बाद के नेविगेशन के लिए, लिडार डेटा, इमू और व्हील एनकोडर डेटा का उपयोग किया जाता है। यदि imu अंशांकन सही ढंग से किया जाता है, लिडार सही ढंग से स्थापित है, और एनकोडर मान सही हैं, तो ओडोमेट्री के लिए कोई समस्या नहीं होनी चाहिए।ओडोमेट्री सही है यह सत्यापित करने के लिए, आपको दूरसंचार के माध्यम से रोबोट पर थोड़ा सा सवारी करने और ओडोम विषय में मूल्यों को देखने की आवश्यकता है, यह प्रोजेक्ट पृष्ठ पर लिखा गया है - लिंक ।और rviz के विज़ुअल शेल को भी देखें: rviz में एक सेल 1 m है, इसलिए रोबोट के लिए यह सलाह दी जाती है कि वह इस मीटर को विजुअल एडिटर और दोनों तरह से पास करे।इसके अलावा, यात्रा की गई दूरी को संकेतक w में प्रदर्शित किया जाता है:
एक सेल 1 m है, इसलिए रोबोट के लिए यह सलाह दी जाती है कि वह इस मीटर को विजुअल एडिटर और दोनों तरह से पास करे।इसके अलावा, यात्रा की गई दूरी को संकेतक w में प्रदर्शित किया जाता है: यह 1 मीटर तक भी होना चाहिए।यह रोबोट के रोटेशन कोण पर भी लागू होता है:
यह 1 मीटर तक भी होना चाहिए।यह रोबोट के रोटेशन कोण पर भी लागू होता है: * Rviz और जियो में, रोबोट को एक ही कोण पर घूमना चाहिए।लिडार से ओडोमेट्री को एक समान तरीके से परिभाषित किया जाता है - एक लिंक। लिडार से निकटतम दीवार की दूरी दोनों जीवित और rviz में मिलनी चाहिए।
* Rviz और जियो में, रोबोट को एक ही कोण पर घूमना चाहिए।लिडार से ओडोमेट्री को एक समान तरीके से परिभाषित किया जाता है - एक लिंक। लिडार से निकटतम दीवार की दूरी दोनों जीवित और rviz में मिलनी चाहिए।TF
आरओएस में, परिवर्तनों पर विशेष ध्यान दिया जाता है - tf। सामान्य शब्दों में, यह अवधारणा अंतरिक्ष में एक दूसरे के सापेक्ष वस्तुओं के सहसंबंध का वर्णन करती है। ताकि वस्तुएं हवा में न लटकें, और कार्यक्रम यह समझता है कि उन्हें एक-दूसरे के सापेक्ष कैसे प्रस्तुत किया जाता है, tf सेटिंग पर ध्यान देना आवश्यक है।परियोजना में, सभी tf कनेक्शन पहले से ही एक दूसरे के सापेक्ष कॉन्फ़िगर किए गए हैं और आपको केवल संकेतक समायोजित करने की आवश्यकता है, उदाहरण के लिए, यह इंगित करें कि लिडार कैसे स्थित है। रोबोट को यह समझने के लिए यह आवश्यक है कि बाधा सीधे उसके सामने नहीं उठती थी, लेकिन लिडार के सामने होती है, जिसे एक निश्चित दूरी पर रोबोट के केंद्र से अलग किया जाता है।चलो उपयुक्त निर्देशिका पर जाएं:roscd linorobot/launch
nano bringup.launch
आधार स्वयं मंजिल से 0.065 मीटर की दूरी पर स्थित है:<node pkg="tf_ros" type="static_transform_publisher" name="base_footprint_to_base_link" args="0 0 0.065 0 0 0 /base_footprint /base_link "/>
लेज़र.लंच में, आपको लिडार के स्थान को रोबोट बेस के केंद्र के सापेक्ष सेट करना होगा:roscd linorobot/launch/include
nano laser.launch
मेरे मामले में, लिडार को x अक्ष के साथ स्थानांतरित किया जाता है: -0.08, y: 0.04 और बेस (z अक्ष) के ऊपर "उगता है": 0.08m:<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_laser"
args="-0.08 0.04 0.08 0 0 0 /base_link /laser "/>
Rviz में, इस स्थान को नेत्रहीन रूप से देखा जा सकता है: जबकि लिडार से दूर नहीं है, हम इसकी आवृत्ति को समायोजित करेंगे ताकि यह अधिक अंक दे (डिफ़ॉल्ट रूप से यह 4k देता है), इससे मानचित्र बनाने में मदद मिलेगी:
जबकि लिडार से दूर नहीं है, हम इसकी आवृत्ति को समायोजित करेंगे ताकि यह अधिक अंक दे (डिफ़ॉल्ट रूप से यह 4k देता है), इससे मानचित्र बनाने में मदद मिलेगी:cd linorobot/launch/include/lidar
nano rplidar.launch
पैरामीटर जोड़ें:<param name="scan_mode" type="string" value="Boost"/>
और बदल जाते हैं<param name="angle_compensate" type="bool" value="false"/>
अब 8k हमारे निपटान में है: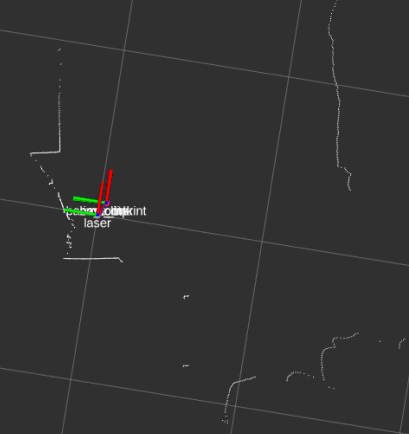 रोबोट पर लिडार की भौतिक स्थिति भी मायने रखती है:
रोबोट पर लिडार की भौतिक स्थिति भी मायने रखती है: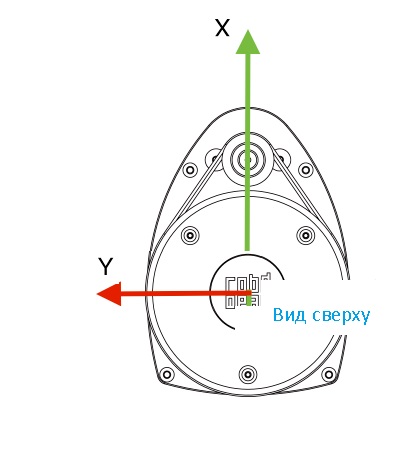
2d कमरे का नक्शा बनाना
परियोजना वेबसाइट पर दो टर्मिनलों में लॉन्च करके एक कमरे का नक्शा बनाने का प्रस्ताव है:roslaunch linorobot bringup.launch
roslaunch linorobot slam.launch
हालांकि, अभ्यास से पता चला है कि स्लैम, जो डिफ़ॉल्ट रूप से प्रोजेक्ट के साथ आता है, जब लिडार मोड 8k है: तो काम करने से इनकार कर देता है,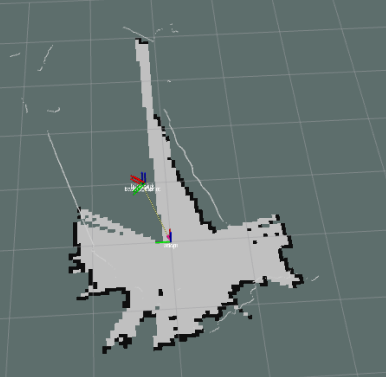 जबकि 4k मोड में, कार्ड बहुत सफल नहीं होते हैं, वे बहुत शोर करते हैं।इसलिए, एक और स्लैम - हेक्टर-स्लैम का उपयोग करना बेहतर है।इसे कैसे स्थापित किया जाए, इसका संकेत यहां दिया गया है ।स्थापना के बाद, एक मानचित्र बनाने की प्रक्रिया समान होगी, लेकिन इसके बजाय roslaunch linorobot slam.launch, चलाएँ roslaunch my_hector_mapping my_launch.launchमैप्स क्लीनर हैं, लेकिन फिर वे एक ग्राफिकल एडिटर में संशोधन करने के लिए बेहतर हैं, अनावश्यक को हटाते हुए, खासकर अगर लिडार दर्पण के निर्माण के दौरान दर्पण से टकराते हैं। :
जबकि 4k मोड में, कार्ड बहुत सफल नहीं होते हैं, वे बहुत शोर करते हैं।इसलिए, एक और स्लैम - हेक्टर-स्लैम का उपयोग करना बेहतर है।इसे कैसे स्थापित किया जाए, इसका संकेत यहां दिया गया है ।स्थापना के बाद, एक मानचित्र बनाने की प्रक्रिया समान होगी, लेकिन इसके बजाय roslaunch linorobot slam.launch, चलाएँ roslaunch my_hector_mapping my_launch.launchमैप्स क्लीनर हैं, लेकिन फिर वे एक ग्राफिकल एडिटर में संशोधन करने के लिए बेहतर हैं, अनावश्यक को हटाते हुए, खासकर अगर लिडार दर्पण के निर्माण के दौरान दर्पण से टकराते हैं। : कमरे का नक्शा बचाना न भूलें:
कमरे का नक्शा बचाना न भूलें:rosrun map_server map_saver -f my-map
* मैप्स एक सुखद गोधूलि में बेहतर प्राप्त होते हैं, यह बजट लिडार से सबसे अधिक निचोड़ लेगा।जारी रहती है।