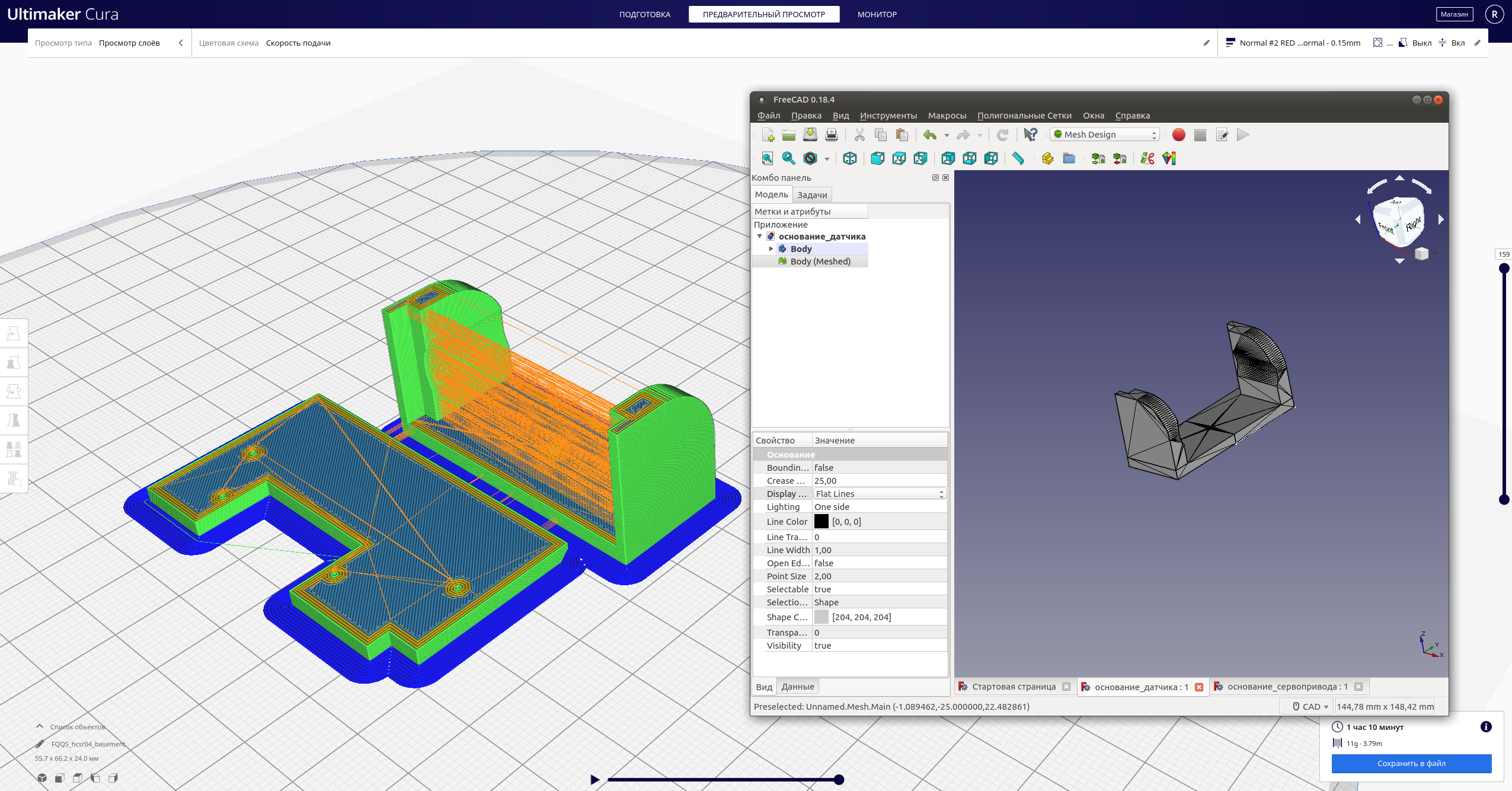
हेलो, हेब्र!इस लेख में एक स्कैनिंग अल्ट्रासोनिक बाधा सेंसर, ब्लिंकिंग एलईडी, स्टार्ट / स्टॉप बटन के साथ-साथ एक एकीकृत वेब सर्वर के साथ-साथ एक प्रशिक्षण परियोजना के हिस्से के रूप में, माइक्रोपीथॉन के साथ esp8266 एमके पर आधारित एक स्व-चालित मंच के उन्नयन की प्रक्रिया का वर्णन है । KDPV: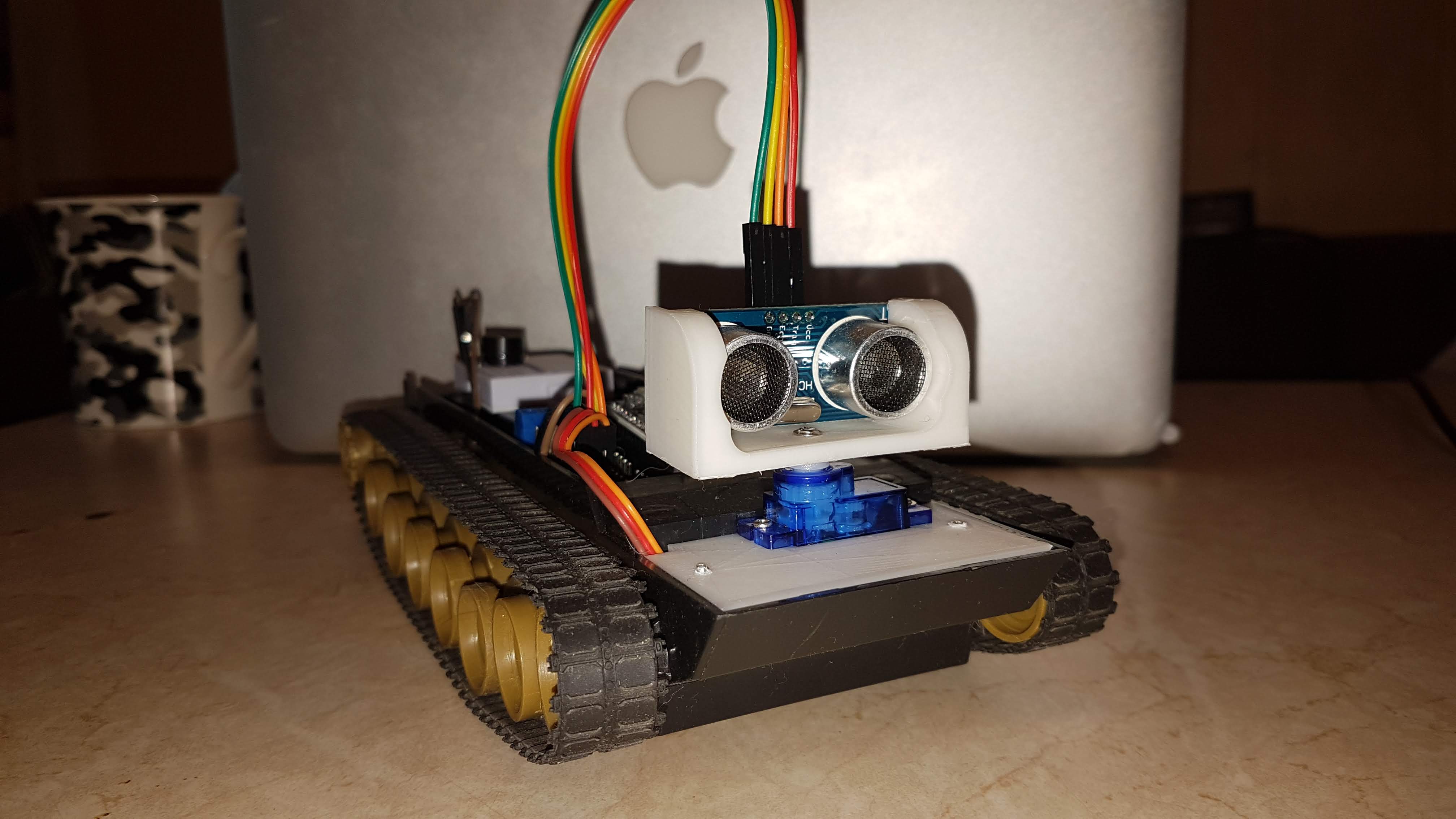 तो, पहले दो भागों ने एक वाईफ़ाई वेब इंटरफेस के माध्यम से नियंत्रित एक स्व-चालित मंच के निर्माण का वर्णन किया।वर्तमान चरण के लिए कार्य इस अल्ट्रासाउंड प्लेटफॉर्म को HC-SR04 सेंसर से लैस करना है, और ऑफ़लाइन काम करने की क्षमता को जोड़ना है।शुरू करने के लिए - यांत्रिक भाग:मामले में सेंसर और सर्वो को ठीक करना आवश्यक है, डिजाइन (मैंने इसके लिए FreeCAD का उपयोग किया है ) और लापता भागों को बनाएं:
तो, पहले दो भागों ने एक वाईफ़ाई वेब इंटरफेस के माध्यम से नियंत्रित एक स्व-चालित मंच के निर्माण का वर्णन किया।वर्तमान चरण के लिए कार्य इस अल्ट्रासाउंड प्लेटफॉर्म को HC-SR04 सेंसर से लैस करना है, और ऑफ़लाइन काम करने की क्षमता को जोड़ना है।शुरू करने के लिए - यांत्रिक भाग:मामले में सेंसर और सर्वो को ठीक करना आवश्यक है, डिजाइन (मैंने इसके लिए FreeCAD का उपयोग किया है ) और लापता भागों को बनाएं: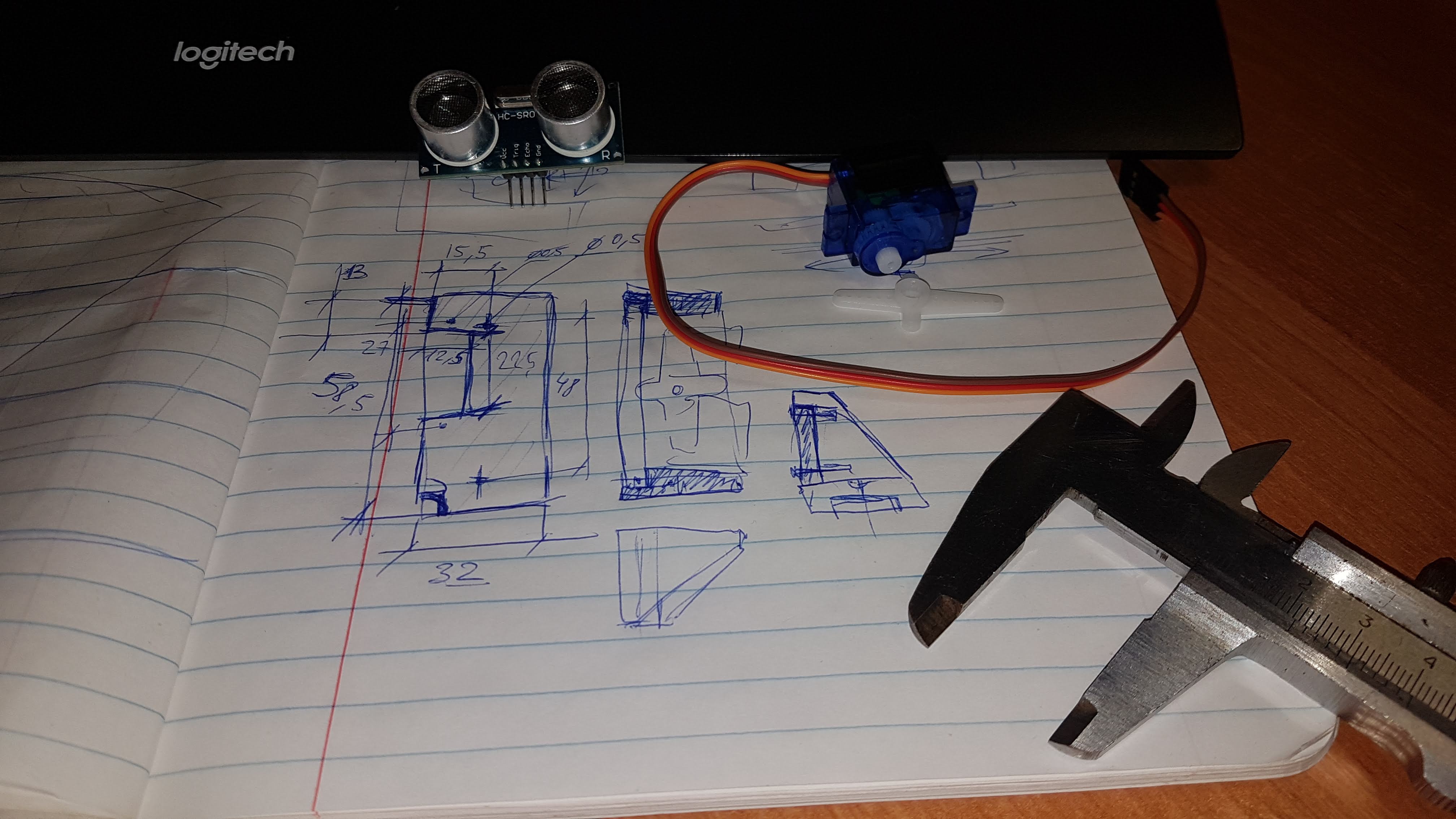
 फिर - इलेक्ट्रिक एक:सर्किट को तैयार करें (उदाहरण के लिए, फ्रिटिंग में और इसके अनुसार स्विचिंग प्रदर्शन करें:
फिर - इलेक्ट्रिक एक:सर्किट को तैयार करें (उदाहरण के लिए, फ्रिटिंग में और इसके अनुसार स्विचिंग प्रदर्शन करें: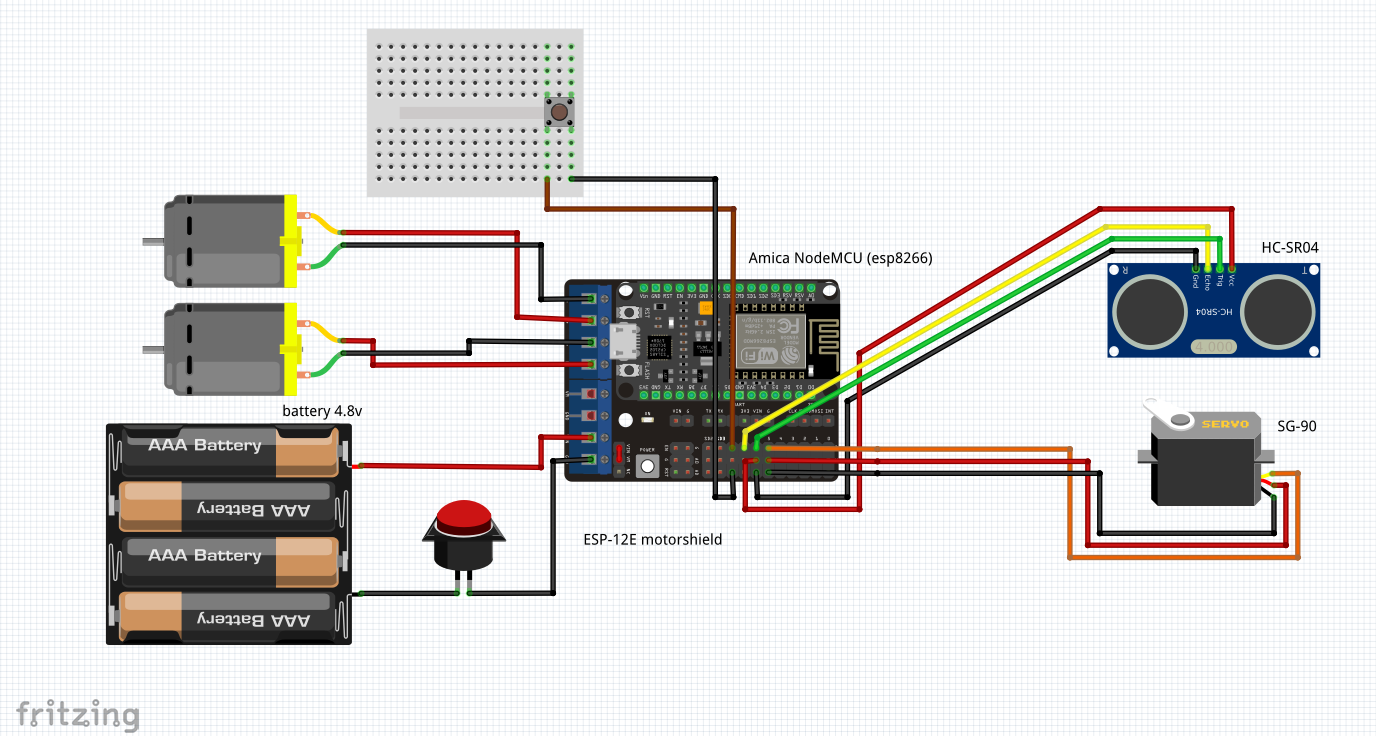 उसके बाद, यह सब उड़ान भरने की कोशिश करो ...चूँकि मैं चाहता था कि रोबोट प्रोग्राम के कुछ कार्य समानांतर में किए जाएं (उदाहरण के लिए, बाधाओं और गति के कार्य को दूरी को स्कैन करने की प्रक्रिया), मुझे एसिंसियो मॉड्यूल की क्षमताओं में उतरना पड़ा । इस और इस लेख में asyncio के साथ अधिक विस्तृत काम का वर्णन किया गया है ।उदाहरण के लिए, एक एलईडी को ब्लिंक करने के लिए, आप ऐसे कोरटाइन को लागू कर सकते हैं, जो व्यावहारिक रूप से सिंक्रोनस से अलग नहीं है:
उसके बाद, यह सब उड़ान भरने की कोशिश करो ...चूँकि मैं चाहता था कि रोबोट प्रोग्राम के कुछ कार्य समानांतर में किए जाएं (उदाहरण के लिए, बाधाओं और गति के कार्य को दूरी को स्कैन करने की प्रक्रिया), मुझे एसिंसियो मॉड्यूल की क्षमताओं में उतरना पड़ा । इस और इस लेख में asyncio के साथ अधिक विस्तृत काम का वर्णन किया गया है ।उदाहरण के लिए, एक एलईडी को ब्लिंक करने के लिए, आप ऐसे कोरटाइन को लागू कर सकते हैं, जो व्यावहारिक रूप से सिंक्रोनस से अलग नहीं है:import uasyncio as asyncio
from machine import Pin
syst_led = Pin(16, Pin.OUT)
async def blink_led(led, interval_ms):
led_val = True
while True:
led_val = not(led_val)
led_state = led.value(int(led_val))
await asyncio.sleep_ms(interval_ms)
loop = asyncio.get_event_loop()
loop.create_task(blink_led(syst_led, interval_ms=250))
loop.run_forever()
अंतर यह है कि ऐसे कोराउटाइन जो अलग-अलग कार्य करते हैं, एक ही समय में कई लॉन्च किए जा सकते हैं (संसाधनों को अनुसूचक द्वारा आवंटित किया जाएगा)।इस प्रकार, हम क्षेत्र को मापने और स्कैन करने के लिए, साथ ही साथ एक हार्डवेयर इंटरप्ट (बटन) के लिए कॉलबैक लिखेंगे जो स्कैनिंग शुरू या बंद करता है। सबसे सरल मामले में कोरटाइन के बीच राज्य का स्थानांतरण वैश्विक चर के माध्यम से किया जा सकता है:बटन के लिए कॉलबैक:from machine import Pin
run_flag = False
button = Pin(15, Pin.IN, Pin.PULL_UP)
def callback(p):
global run_flag
run_flag = not(run_flag)
print('set run_flag', run_flag, p)
button.irq(trigger=Pin.IRQ_FALLING, handler=callback)
दूरी माप:import uasyncio as asyncio
from utime import sleep, sleep_us
from machine import Pin, time_pulse_us
trig=Pin(12, Pin.OUT)
echo=Pin(13, Pin.IN)
async def async_measure_range():
echo_timeout_us=500*2*30
trig.off()
sleep_us(5)
trig.on()
sleep_us(10)
trig.off()
try:
pulse_time = time_pulse_us(echo, 1, echo_timeout_us)
except:
pass
dist = (pulse_time / 2) / 29.1
return dist
सेक्टर स्कैनिंग (दूरी मापक कॉलआउट के साथ):import uasyncio as asyncio
from machine import Pin, PWM
pos_actual = 75
dist_cm = 50
p14 = Pin(14, Pin.OUT)
servo = PWM(p14, freq=50)
async def radar_scan(interval_ms):
pos_list = [45,75,105,75]
global pos_actual
global dist_cm
while True:
if run_flag:
for pos in pos_list:
servo.duty(pos)
await asyncio.sleep_ms(interval_ms)
dist_cm = await async_measure_range()
pos_actual = pos
print('pos_actual = %s, dist_cm = %s' % (pos_actual, dist_cm)
elif not run_flag:
await asyncio.sleep(0)
loop = asyncio.get_event_loop(
loop.create_task(radar_scan(interval_ms=250))
loop.run_forever()
सेंसर को डिबग करने की प्रक्रिया में, समय-समय पर, एक नकारात्मक दूरी मूल्य दिया। यह पता चला - "इलेक्ट्रॉनिक्स बुरे संपर्कों का विज्ञान है" , जब सेंसर चालू किया गया था, तो केबल खींचा गया था और संपर्क खो गया था।यह स्कैन के परिणामों के आधार पर कार्रवाई की पसंद के तर्क को तेज करने के लिए बना हुआ है:avoid_left = False
avoid_right = False
avoid_backward = False
async def make_decision(interval_ms, avoid_limit_cm):
global avoid_left
global avoid_right
global avoid_backward
while True:
if run_flag:
if pos_actual == 45 and dist_cm < avoid_limit_cm :
avoid_left = True
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 45 and dist_cm >= avoid_limit_cm :
avoid_left = False
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 75 and dist_cm < avoid_limit_cm*1.25 :
avoid_backward = True
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 75 and dist_cm >= avoid_limit_cm*1.25 :
avoid_backward = False
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 105 and dist_cm < avoid_limit_cm :
avoid_right = True
if debug : print('avoid_right = %s' % avoid_right)
elif pos_actual == 105 and dist_cm >= avoid_limit_cm :
avoid_right = False
if debug : print('avoid_right = %s' % avoid_right)
if debug : print('pos = %s, dist_cm = %s' % (pos_actual,dist_cm))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
loop.create_task(make_decision(interval_ms=250, avoid_limit_cm=15))
मोटर कार्य:from random import getrandbits
async def moving(interval_ms):
while True:
if run_flag:
if avoid_backward :
print('avoid_backward = %s' % avoid_backward)
await backward(interval_ms*2)
if bool(getrandbits(1)) :
await right_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
else:
await left_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
elif avoid_left :
print('avoid_left = %s' % avoid_left)
await left_turn(interval_ms)
elif avoid_right :
print('avoid_right = %s' % avoid_right)
await right_turn(interval_ms)
else:
print('move_forward')
await forward(interval_ms)
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await stop_all()
await asyncio.sleep(0)
loop.create_task(moving(interval_ms=1000))
और मोटर नियंत्रण
p5 = Pin(5, Pin.OUT)
p4 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
motor_L = PWM(p5, freq=1000, duty=0)
motor_R = PWM(p4, freq=1000, duty=0)
speed = 1023
async def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
async def forward(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def backward(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_rotate(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def left_rotate(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
await asyncio.sleep_ms(interval_ms)
async def left_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
साथ ही एक निमिष एलईडी को नियंत्रित करने के लिए कि कार्यक्रम काम कर रहा है:async def blink_led(led, interval_ms):
led_val = True
while True:
if run_flag:
led_val = not(led_val)
led_state = led.value(int(led_val))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
loop.create_task(blink_led(syst_led, interval_ms=250))
जिसके बाद, यह केवल यह सब इकट्ठा करने के लिए बनी हुई हैसाबुतimport gc
import uasyncio as asyncio
from utime import sleep, sleep_us
from machine import Pin, PWM, time_pulse_us
from random import getrandbits
p5 = Pin(5, Pin.OUT)
p4 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
motor_L = PWM(p5, freq=1000, duty=0)
motor_R = PWM(p4, freq=1000, duty=0)
speed = 1023
p14 = Pin(14, Pin.OUT)
servo = PWM(p14, freq=50)
button = Pin(15, Pin.IN, Pin.PULL_UP)
syst_led = Pin(16, Pin.OUT)
trig=Pin(12, Pin.OUT)
echo=Pin(13, Pin.IN)
run_flag = False
avoid_left = False
avoid_right = False
avoid_backward = False
pos_actual = 75
dist_cm = 50
debug = False
def callback(p):
global run_flag
run_flag = not(run_flag)
print('set run_flag', run_flag, p)
def stop_all_sync():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
async def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
async def forward(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def backward(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_rotate(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def left_rotate(interval_ms):
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def right_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
await asyncio.sleep_ms(interval_ms)
async def left_turn(interval_ms):
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
await asyncio.sleep_ms(interval_ms)
async def moving(interval_ms):
while True:
if run_flag:
if avoid_backward :
print('avoid_backward = %s' % avoid_backward)
await backward(interval_ms*2)
if bool(getrandbits(1)) :
await right_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
else:
await left_rotate(interval_ms+getrandbits(3)*100)
await stop_all()
elif avoid_left :
print('avoid_left = %s' % avoid_left)
await left_turn(interval_ms)
elif avoid_right :
print('avoid_right = %s' % avoid_right)
await right_turn(interval_ms)
else:
print('move_forward')
await forward(interval_ms)
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await stop_all()
await asyncio.sleep(0)
async def blink_led(led, interval_ms):
led_val = True
while True:
if run_flag:
led_val = not(led_val)
led_state = led.value(int(led_val))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
async def async_measure_range():
echo_timeout_us=500*2*30
trig.off()
sleep_us(5)
trig.on()
sleep_us(10)
trig.off()
try:
pulse_time = time_pulse_us(echo, 1, echo_timeout_us)
except:
pass
dist = (pulse_time / 2) / 29.1
return dist
async def make_decision(interval_ms, avoid_limit_cm):
global avoid_left
global avoid_right
global avoid_backward
while True:
if run_flag:
if pos_actual == 45 and dist_cm < avoid_limit_cm :
avoid_left = True
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 45 and dist_cm >= avoid_limit_cm :
avoid_left = False
if debug : print('avoid_left = %s' % avoid_left)
elif pos_actual == 75 and dist_cm < avoid_limit_cm*1.25 :
avoid_backward = True
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 75 and dist_cm >= avoid_limit_cm*1.25 :
avoid_backward = False
if debug : print('avoid_backward = %s' % avoid_backward)
elif pos_actual == 105 and dist_cm < avoid_limit_cm :
avoid_right = True
if debug : print('avoid_right = %s' % avoid_right)
elif pos_actual == 105 and dist_cm >= avoid_limit_cm :
avoid_right = False
if debug : print('avoid_right = %s' % avoid_right)
if debug : print('pos = %s, dist_cm = %s' % (pos_actual,dist_cm))
await asyncio.sleep_ms(interval_ms)
elif not run_flag:
await asyncio.sleep(0)
async def radar_scan(interval_ms):
pos_list = [45,75,105,75]
global pos_actual
global dist_cm
while True:
if run_flag:
for pos in pos_list:
servo.duty(pos)
await asyncio.sleep_ms(interval_ms)
dist_cm = await async_measure_range()
pos_actual = pos
elif not run_flag:
await asyncio.sleep(0)
stop_all_sync()
print('Move sensor to initial position...')
servo.duty(75)
sleep(1)
print('Waiting for start button...')
gc.enable()
button.irq(trigger=Pin.IRQ_FALLING, handler=callback)
loop = asyncio.get_event_loop()
loop.create_task(blink_led(syst_led, interval_ms=250))
loop.create_task(radar_scan(interval_ms=250))
loop.create_task(make_decision(interval_ms=250, avoid_limit_cm=15))
loop.create_task(moving(interval_ms=1000))
loop.run_forever()
और काम में जांच:हालाँकि, मैं वेब पेज के माध्यम से मैन्युअल नियंत्रण की संभावना रखना चाहूंगा ...इसके लिए, एक अलग coroutine में, एक साधारण वेब सर्वर जोड़ें:async def web_page(request):
global auto_run_flag
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
auto_run_flag = False
forward_sync()
elif request.find('GET /?left_rotate') > 0:
motor_state="Rotate Left"
auto_run_flag = False
left_rotate_sync()
elif request.find('GET /?right_rotate') > 0:
motor_state="Rotate Right"
auto_run_flag = False
right_rotate_sync()
elif request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
auto_run_flag = False
left_turn_sync()
elif request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
auto_run_flag = False
right_turn_sync()
elif request.find('GET /?backward') > 0:
motor_state="Going Backward"
auto_run_flag = False
backward_sync()
elif request.find('GET /?stop') > 0:
motor_state="Stopped"
auto_run_flag = False
stop_all_sync()
elif request.find('GET /?auto') > 0:
auto_run_flag = not auto_run_flag
if auto_run_flag :
motor_state="Autopilot"
elif not auto_run_flag :
motor_state="Stopped"
stop_all_sync()
html = """<html><head><title>RoboTank WEB</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="data:,"> <style>
html{font-family: Helvetica; display:inline-block; margin: 0px auto; text-align: center;}
h1{color: #0F3376; padding: 2vh;}p{font-size: 1.5rem;}
.button{display: inline-block; background-color: #33c080; border: none;
border-radius: 4px; color: white; text-decoration: none; font-size: 30px; width:100%}
.button2{background-color: #4286f4; width:30%}
.button3{background-color: #eb2b10; width:35%}
.button4{background-color: #8386f4; width:44%}
</style></head>
<body> <h1>RoboTank WEB</h1>
<p>Status : <strong>""" + motor_state + """</strong></p>
<p><a href='/?forward'><button class="button">Forward</button></a></p>
<p><a href='/?left_turn'><button class="button button2">LEFT</button></a>
<a href='/?stop'><button class="button button3">STOP</button></a>
<a href='/?right_turn'><button class="button button2">RIGHT</button></a>
<p><a href='/?backward'><button class="button">Backward</button></a></p>
<p><a href='/?left_rotate'><button class="button button4">L-rotate</button></a>
<a href='/?right_rotate'><button class="button button4">R-rotate</button></a></p>
<p><a href='/?auto'><button class="button button3">AUTO</button></a></p>
</body></html>"""
return html
async def web_handler(reader, writer):
try:
request = str(await reader.read(1024))
header = """HTTP/1.1 200 OK\nContent-Type: text/html\nConnection: close\n\n"""
response = await web_page(request)
await writer.awrite(header)
await writer.awrite(response)
await writer.aclose()
print("Finished processing request")
except Exception as e:
print(e)
async def tcp_server(host, port):
server = await asyncio.start_server(web_handler, host, port)
loop.create_task(tcp_server('0.0.0.0', 80))
और मैनुअल नियंत्रण के लिए तुल्यकालिक गति कार्य करता है।def stop_all_sync():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward_sync():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward_sync():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_rotate_sync():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left_rotate_sync():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn_sync():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn_sync():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
इंटरफ़ेस उपस्थिति: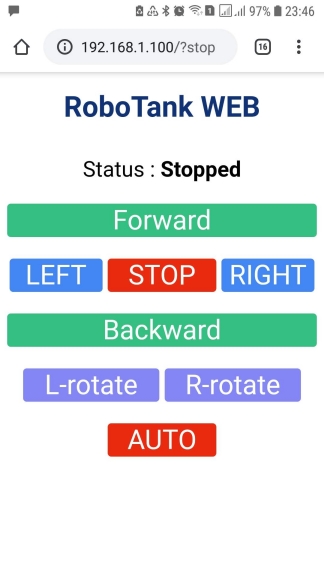 अंतिम संस्करण के परीक्षण:यहां स्रोत उपलब्ध हैं।प्रेरणा के स्रोत:docs.micropython.org/en/latest/library/uasyncio.htmlhabr.com/en/post/484446habr.com/en/post/337420habr.com/en/post/484472github.com/peterhinch /micropython-async/blob/master/TUTORIAL.mdgithub.com/rsc1975/micropython-hcsr04medium.com/@pgjones/an-asyncio-socket-tutorial-5e6f3308b8b0b0
अंतिम संस्करण के परीक्षण:यहां स्रोत उपलब्ध हैं।प्रेरणा के स्रोत:docs.micropython.org/en/latest/library/uasyncio.htmlhabr.com/en/post/484446habr.com/en/post/337420habr.com/en/post/484472github.com/peterhinch /micropython-async/blob/master/TUTORIAL.mdgithub.com/rsc1975/micropython-hcsr04medium.com/@pgjones/an-asyncio-socket-tutorial-5e6f3308b8b0b0