हेलो, हेब्र!यह आलेख एक एकीकृत वेब सर्वर के माध्यम से प्रबंधित माइक्रोप्रिथॉन के साथ esp8266 एमके पर आधारित एक स्व-चालित प्लेटफ़ॉर्म प्लेटफ़ॉर्म के निर्माण की प्रक्रिया में एक शुरुआत की पीड़ा का वर्णन करता है। KDPV: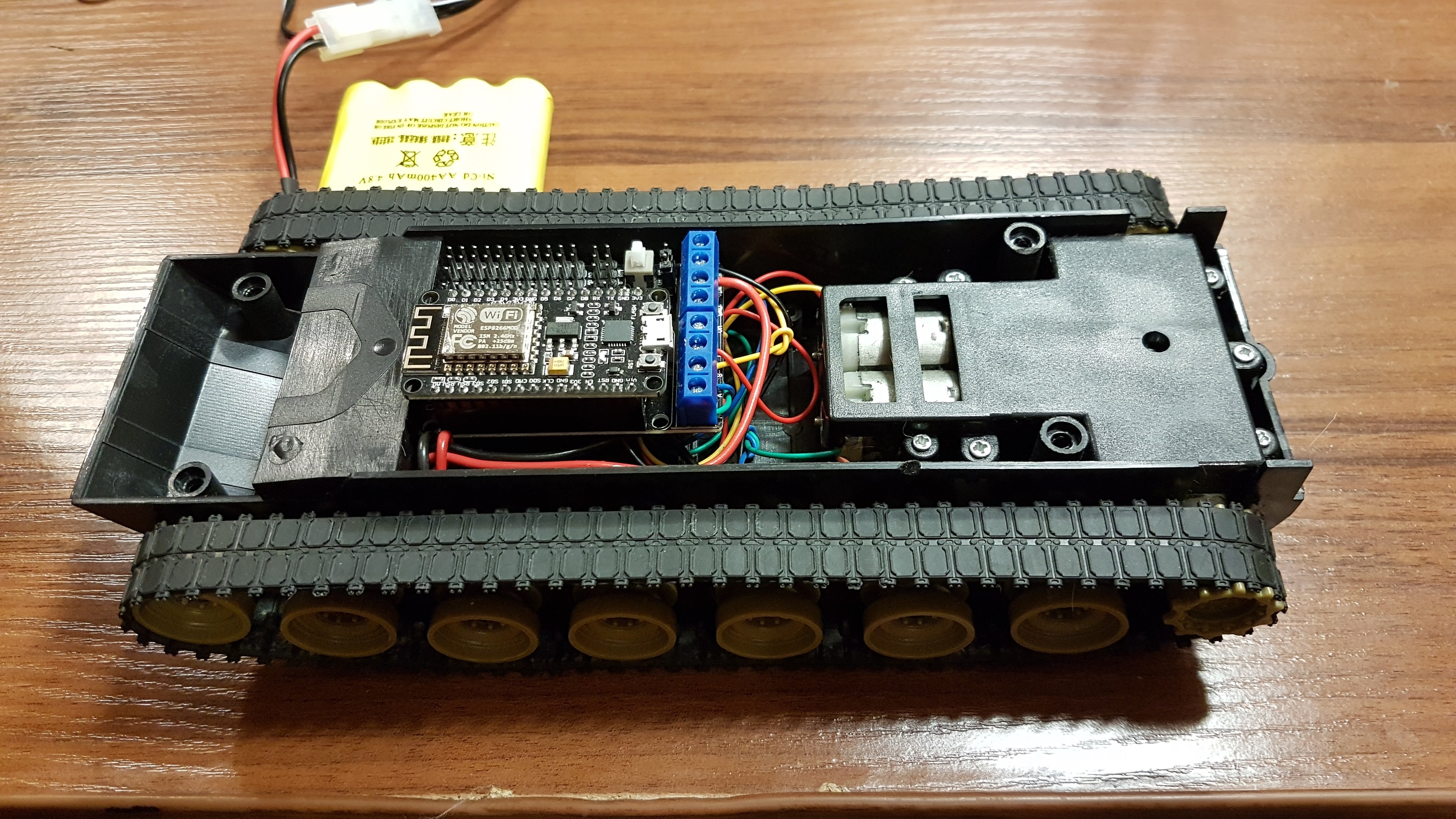 जैसा कि मैंने पहले लेख में उल्लेख किया है , परियोजना शैक्षिक है, इसलिए कृपया सख्ती से न्याय न करें।तो, पहले चरण का कार्य एक कैटरपिलर प्लेटफ़ॉर्म बनाना है जिसे वाई-फाई के माध्यम से नियंत्रित किया जा सकता है।इसके लिए, एक पुराना खिलौना टैंक डिब्बे में पाया गया था, साथ ही एमके एस्प 8266 (ईएसपी -12 ई) और इसके लिए एक मोटर चालक खरीदा गया था।
जैसा कि मैंने पहले लेख में उल्लेख किया है , परियोजना शैक्षिक है, इसलिए कृपया सख्ती से न्याय न करें।तो, पहले चरण का कार्य एक कैटरपिलर प्लेटफ़ॉर्म बनाना है जिसे वाई-फाई के माध्यम से नियंत्रित किया जा सकता है।इसके लिए, एक पुराना खिलौना टैंक डिब्बे में पाया गया था, साथ ही एमके एस्प 8266 (ईएसपी -12 ई) और इसके लिए एक मोटर चालक खरीदा गया था।एस्प 8266 और मोटरशिल्ड असेंबली इसके अलावा, उपरोक्त सभी योजना के अनुसार इकट्ठा किया गया था: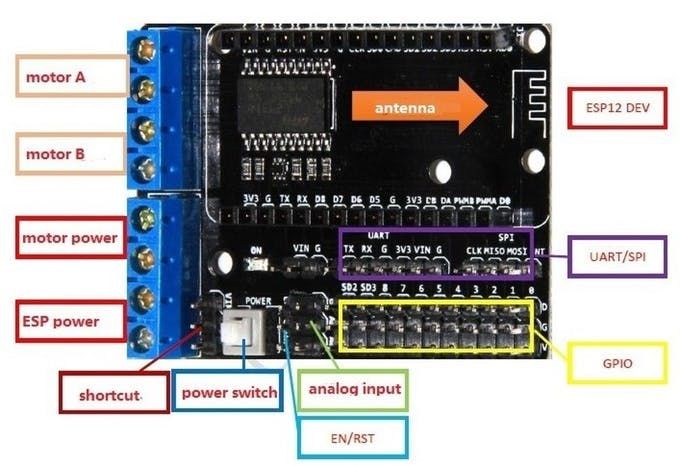 और प्रलेखन
और प्रलेखन के एक संक्षिप्त अध्ययन के कुछ दिनों के बाद , यह स्पष्ट हो गया कि मोटरों को कैसे नियंत्रित किया जाए:from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
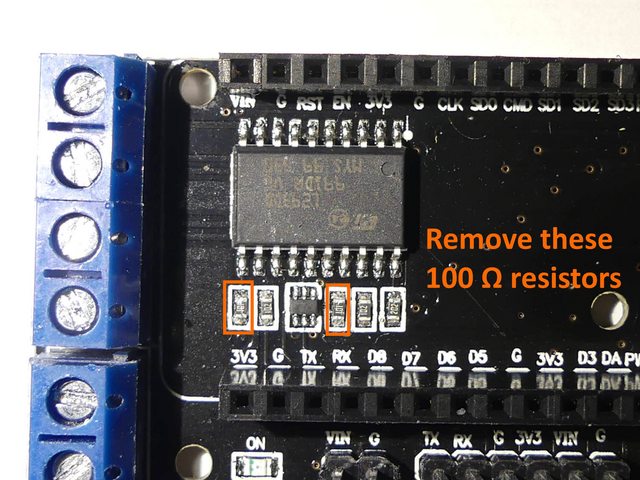
इस प्रकार, pin5 और pin4 - आप PWM के माध्यम से मोटर्स के रोटेशन की गति निर्धारित करने की अनुमति देते हैं, और pin0 और pin2 - क्रमशः आउटपुट "ए" और "बी" के लिए रिवर्स को नियंत्रित करते हैं। इसके अलावा, चूंकि LED मेरे बोर्ड पर pin2 से भी जुड़ा हुआ है, इसलिए हम आंदोलन के साथ समानांतर में भी हल्के प्रभावों का निरीक्षण करते हैं :)हालांकि, यह तुरंत बंद नहीं हुआ ...किसी दिए गए विषय पर Google ने एक मंच का नेतृत्व किया जहां दो "अतिरिक्त" प्रतिरोधों को हटाने की सिफारिश की गई थी, जो किया गया था। वहां से बोली:मैंने इन प्रतिरोधों को मापा, L293DD के इनपुट पर, प्रतिरोध 1K है, लेकिन उनके पास जमीन पर केवल 100 ओम का प्रतिरोध है। इसका मतलब है कि NodeMCU कंट्रोलर से इनपुट सिग्नल L293DD तक नहीं पहुंच सकता है। मैं वास्तव में नहीं जानता कि वे वहां क्यों हैं - L293DD अपने इनपुट पर 7 V तक की प्रक्रिया कर सकता है, और NodeMCU 3.3 V आउटपुट देता है।
मैंने इन दो 100 ओम प्रतिरोधों को हटा दिया (एंटीना के दाईं ओर पहला और तीसरा बाईं ओर), और अब। ढाल काम करती है।
 उसके बाद, चीजें आसानी से चली गईं, और
उसके बाद, चीजें आसानी से चली गईं, औरकोड का अंतिम संस्करण
import network
import socket
from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
""" function for connecting to your local WiFi network """
def do_connect():
essid = 'home_wifi'
password = '12345678'
sta_if = network.WLAN(network.STA_IF)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect(essid, password)
while not sta_if.isconnected():
pass
print('network config:', sta_if.ifconfig())
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
def web_page(request):
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
forward()
if request.find('GET /?left') > 0:
motor_state="Rotate Left"
left()
if request.find('GET /?right') > 0:
motor_state="Rotate Right"
right()
if request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
left_turn()
if request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
right_turn()
if request.find('GET /?backward') > 0:
motor_state="Going Backward"
backward()
if request.find('GET /?stop') > 0:
motor_state="Stopped"
stop_all()
html = """<html><head><title>RoboTank WEB</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="data:,"> <style>
html{font-family: Helvetica; display:inline-block; margin: 0px auto; text-align: center;}
h1{color: #0F3376; padding: 2vh;}p{font-size: 1.5rem;}
.button{display: inline-block; background-color: #33c080; border: none;
border-radius: 4px; color: white; text-decoration: none; font-size: 30px; width:100%}
.button2{background-color: #4286f4; width:30%}
.button3{background-color: #eb2b10; width:35%}
.button4{background-color: #8386f4; width:44%}
</style></head>
<body> <h1>RoboTank WEB</h1>
<p>Status : <strong>""" + motor_state + """</strong></p>
<p><a href='/?forward'><button class="button">Forward</button></a></p>
<p><a href='/?left_turn'><button class="button button2">LEFT</button></a>
<a href='/?stop'><button class="button button3">STOP</button></a>
<a href='/?right_turn'><button class="button button2">RIGHT</button></a>
<p><a href='/?backward'><button class="button">Backward</button></a></p>
<p><a href='/?left'><button class="button button4">L-rotate</button></a>
<a href='/?right'><button class="button button4">R-rotate</button></a></p>
</body></html>"""
return html
stop_all()
do_connect()
addr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]
s = socket.socket()
try:
s.bind(addr)
s.listen(1)
except:
s.close()
s.bind(addr)
s.listen(1)
while True:
conn, addr = s.accept()
print('Got a connection from %s' % str(addr))
request = conn.recv(1024)
request = str(request)
print('The Content = %s' % request)
response = web_page(request)
conn.send('HTTP/1.1 200 OK\n')
conn.send('Content-Type: text/html\n')
conn.send('Connection: close\n\n')
conn.sendall(response)
conn.close()
यह काफी कुशल निकला, और पहले चरण में सफलतापूर्वक सेट किए गए कार्य को हल कर रहा था।पहला पोकातुकी:पहले भाग (ESP8266 पर micropython स्थापित कर रहा है और लिनक्स के तहत यह काम करने के साथ)(micropython साथ एमके esp8266 पर सरल रोबोट) अगले भागप्रेरणा का स्रोत:funprojects.blog/2019/02/12/micropython-air-boatwww.instructables.com/id / सरलतम-वाईफ़ाई-कार-प्रयोग-ESP8266-Motorshieldforum.micropython.org/viewtopic.php?t=3977randomnerdtutorials.com/esp32-esp8266 -micropython -web-serverdocs.micropython.org/en/latest/esp26 ट्यूटोरियल / index.html