ये सब कैसे शुरू हुआ
मैं सभी का स्वागत करता हूं। मैं मैक्सिम हूं और मैं इस बारे में जानकारी साझा करना चाहता हूं कि मैंने अपनी यात्रा की शुरुआत में इलेक्ट्रॉनिक्स के किसी भी ज्ञान के बिना एक रेडियो-नियंत्रित पनडुब्बी को कैसे इकट्ठा किया। मैं खुद एक एनीमेशन और कंप्यूटर ग्राफिक्स कलाकार हूं - मैंने कभी भी प्रोग्रामिंग या इलेक्ट्रॉनिक्स नहीं किया है। मुझे सोल्डरिंग के बारे में ज्ञान की केवल एक छोटी आपूर्ति थी, जो मेरे दादा ने मुझे दी थी जब मैं अभी भी एक प्राथमिक स्कूल का छात्र था।मेरा सारा जीवन मैं पानी के नीचे अनुसंधान के विषय में रुचि रखता था, यह सब उसी समय शुरू हुआ, बचपन में, जे.आई. Cousteau, और यूरोप के बर्फीले महासागरों के बारे में एक खेल के विकास के साथ समाप्त हुआ। लेकिन, अब, इस बारे में नहीं है।यह तय करने के बाद कि मेरे शौक को अभ्यास के विमान में स्थानांतरित करने का समय है - मैं Youtube गया। मुझे सबसे बुनियादी ज्ञान का एक मुट्ठी भर मिला और फिर मेरा रास्ता पहले से ही कई तरह से अलीएक्सप्रेस पर पड़ा। यह सभी विभिन्न मॉड्यूल और अन्य घटकों के 27 नामों की खरीद के साथ समाप्त हुआ।
मैं खुद एक एनीमेशन और कंप्यूटर ग्राफिक्स कलाकार हूं - मैंने कभी भी प्रोग्रामिंग या इलेक्ट्रॉनिक्स नहीं किया है। मुझे सोल्डरिंग के बारे में ज्ञान की केवल एक छोटी आपूर्ति थी, जो मेरे दादा ने मुझे दी थी जब मैं अभी भी एक प्राथमिक स्कूल का छात्र था।मेरा सारा जीवन मैं पानी के नीचे अनुसंधान के विषय में रुचि रखता था, यह सब उसी समय शुरू हुआ, बचपन में, जे.आई. Cousteau, और यूरोप के बर्फीले महासागरों के बारे में एक खेल के विकास के साथ समाप्त हुआ। लेकिन, अब, इस बारे में नहीं है।यह तय करने के बाद कि मेरे शौक को अभ्यास के विमान में स्थानांतरित करने का समय है - मैं Youtube गया। मुझे सबसे बुनियादी ज्ञान का एक मुट्ठी भर मिला और फिर मेरा रास्ता पहले से ही कई तरह से अलीएक्सप्रेस पर पड़ा। यह सभी विभिन्न मॉड्यूल और अन्य घटकों के 27 नामों की खरीद के साथ समाप्त हुआ। 27 पार्सल की तलाश में डाकघर का कर्मचारी बहुत दुखी था ...
27 पार्सल की तलाश में डाकघर का कर्मचारी बहुत दुखी था ...पनडुब्बी और पहली विफलताओं पर काम की शुरुआत
सबसे पहले मुझे एक आदमी मिला जो पनडुब्बियों के बारे में पहले से जानता है, उसने मुझे सिद्धांत और परीक्षणों में मदद की।इसके बाद, मैंने तुरंत Arduino के लिए अपना पहला कोड लिखना शुरू कर दिया। यह दो पनडुब्बी इंजनों को नियंत्रित करने के लिए एक कोड था। दो पोटेंशियोमीटर: बायाँ इंजनों की कुल शक्ति को नियंत्रित करता है, और दायें पनडुब्बी के घूमने को नियंत्रित करता है (पोटेंशियोमीटर की स्थिति के आधार पर इंजन की एक शक्ति को कम करता है)। यह सब मैंने एक सस्ती डिस्प्ले पर प्रदर्शित किया, जैसा कि मैंने एक अलग कंट्रोल पैनल बनाने की योजना बनाई (नतीजतन, पनडुब्बी को स्मार्टफोन के माध्यम से नियंत्रित किया जाता है)।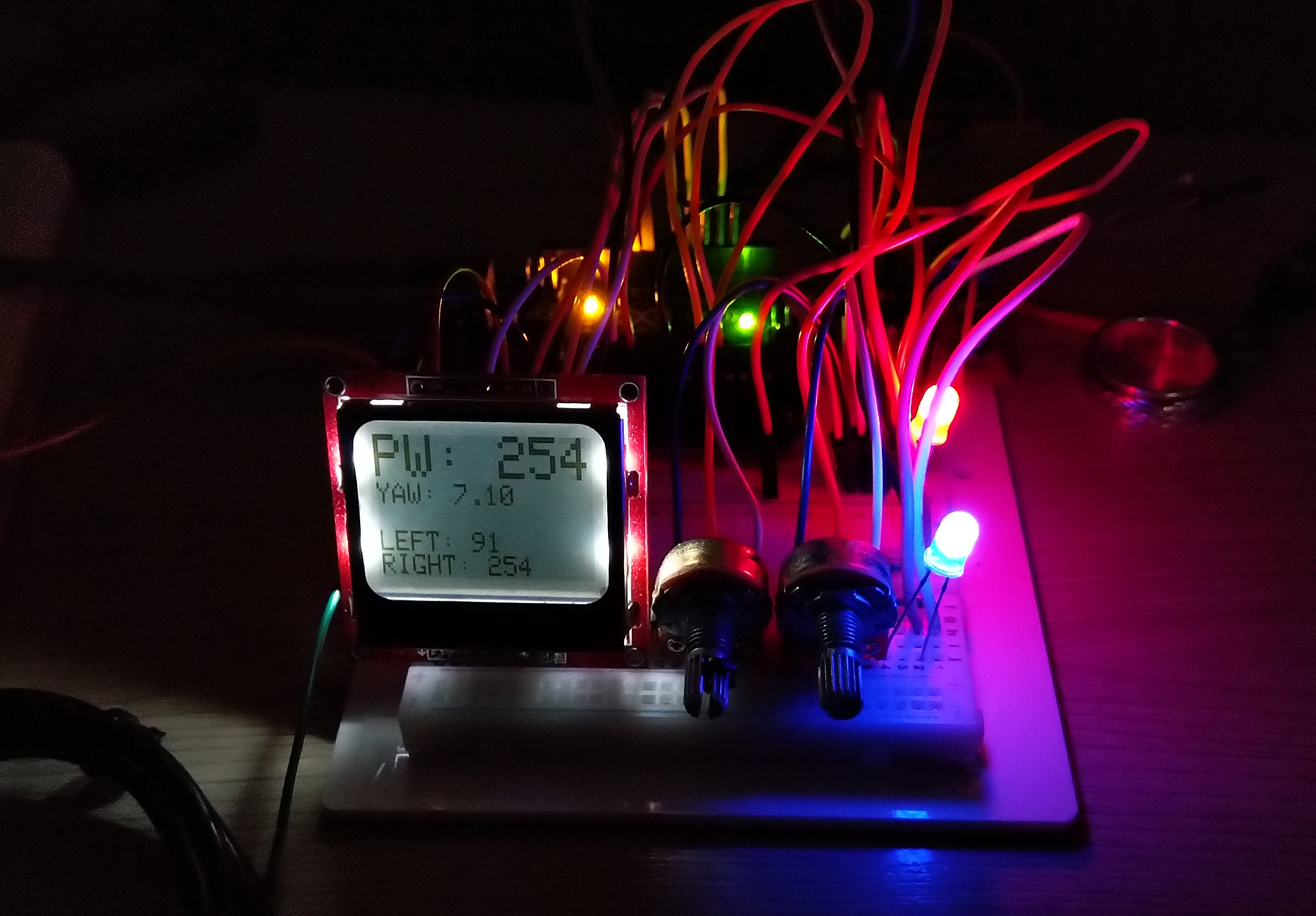 यह देखते हुए कि एक हफ्ते पहले मुझे नहीं पता था कि कैसे पोटेंशियोमीटर काम करते हैं, मेरा उत्साह अवर्णनीय था। वहाँ नहीं रुककर, मैं एक हार्डवेयर स्टोर और फ़ार्मेसी में गया। निर्माण उद्योग में, मैंने विभिन्न पॉलीप्रोपलीन पाइप, कपलिंग और क्लैम्प्स बनाए, और फार्मेसी में मैंने कई जेनेट सीरिंज लीं।पाइप्स, क्रमशः, पनडुब्बी की पतवार के लिए चला गया, और सीरिंज मॉड्यूल को उछाल बदलती है। बस बदलती उछाल के लिए मॉड्यूल मेरे लिए सबसे समस्याग्रस्त हिस्सा बन गया।
यह देखते हुए कि एक हफ्ते पहले मुझे नहीं पता था कि कैसे पोटेंशियोमीटर काम करते हैं, मेरा उत्साह अवर्णनीय था। वहाँ नहीं रुककर, मैं एक हार्डवेयर स्टोर और फ़ार्मेसी में गया। निर्माण उद्योग में, मैंने विभिन्न पॉलीप्रोपलीन पाइप, कपलिंग और क्लैम्प्स बनाए, और फार्मेसी में मैंने कई जेनेट सीरिंज लीं।पाइप्स, क्रमशः, पनडुब्बी की पतवार के लिए चला गया, और सीरिंज मॉड्यूल को उछाल बदलती है। बस बदलती उछाल के लिए मॉड्यूल मेरे लिए सबसे समस्याग्रस्त हिस्सा बन गया।ब्यूयेंसी मोडुलस
इस मॉड्यूल के कार्य काफी सरल हैं, पानी एकत्र करते हैं और इसे वापस कमांड पर निचोड़ते हैं। और सवाल पैदा हुआ - एक सिरिंज के पिस्टन को कैसे धक्का दिया जाए, जिसमें मुट्ठी भर सर्वोस, मोटर्स और गियर का एक सेट हो? यह इस तरह से धकेलने लायक नहीं है: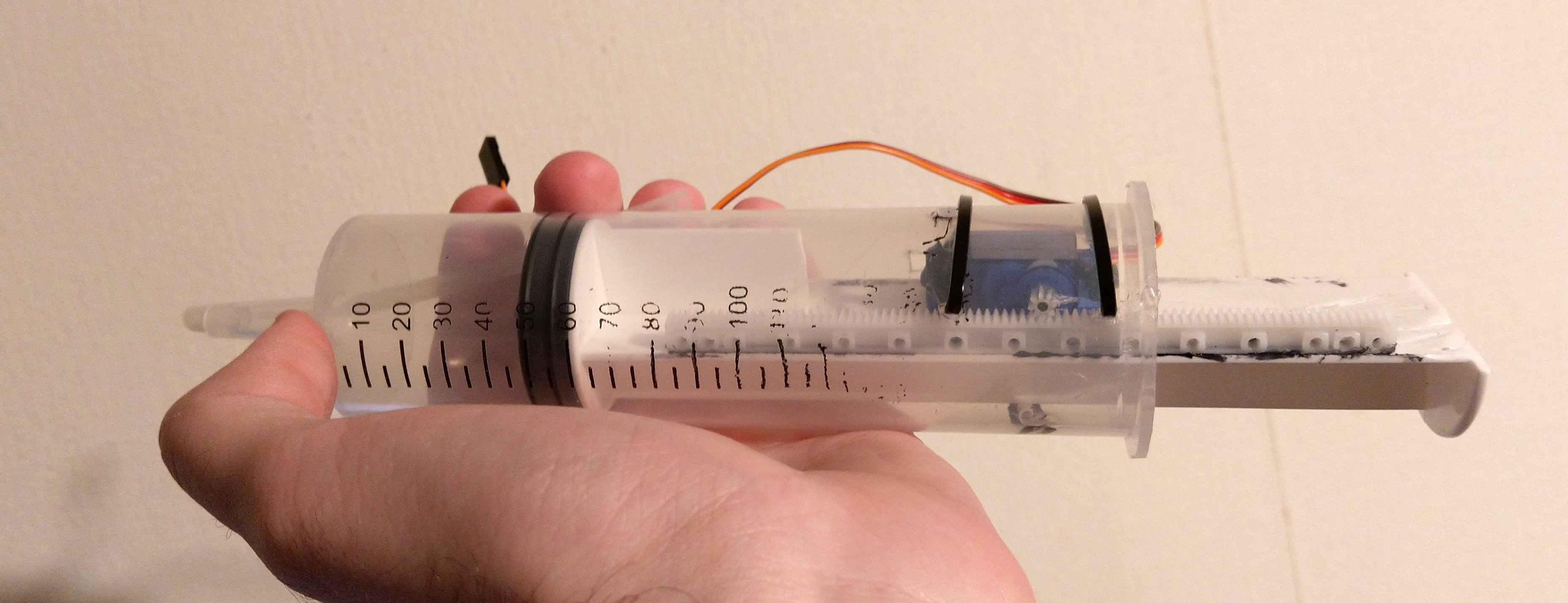 यह गियर और अन्य trifles के साथ बातचीत करने का पहला अनुभव था। वैसे, मैं 360 ° रोटेशन के लिए sg90 सर्वो को रीमेक करने में सक्षम था: मैंने मुख्य गियर पर कुंडी को तेज किया, जो पोटेंशियोमीटर को बदल दिया, और पोटेंशियोमीटर शाफ्ट को शून्य स्थिति में चिपका दिया ताकि यह गलती से एक ट्रिम किए गए सीमक के साथ भी घूम न सके।यह अभी भी समस्या को हल करने में मदद नहीं करता था - मैं गियर रैक के साथ बातचीत करने वाले गियर को मज़बूती से ठीक नहीं कर सकता था। प्राप्त इंजीनियरिंग अनुभव ने मुझे दूसरी बार उछाल परिवर्तन मॉड्यूल में महारत हासिल करने में मदद की: मैंने एक अधिक शक्तिशाली सर्वो, एक मोटी थ्रेडेड रॉड और एक नट लिया, जिसे मैंने पिस्टन पर तय किया। इस बार मैं सर्वो के संशोधन से परेशान नहीं था, मैंने फैसला किया कि बाहरी ड्राइवर का उपयोग करना और सीधे इमदादी मोटर से जुड़ना आसान है।
यह गियर और अन्य trifles के साथ बातचीत करने का पहला अनुभव था। वैसे, मैं 360 ° रोटेशन के लिए sg90 सर्वो को रीमेक करने में सक्षम था: मैंने मुख्य गियर पर कुंडी को तेज किया, जो पोटेंशियोमीटर को बदल दिया, और पोटेंशियोमीटर शाफ्ट को शून्य स्थिति में चिपका दिया ताकि यह गलती से एक ट्रिम किए गए सीमक के साथ भी घूम न सके।यह अभी भी समस्या को हल करने में मदद नहीं करता था - मैं गियर रैक के साथ बातचीत करने वाले गियर को मज़बूती से ठीक नहीं कर सकता था। प्राप्त इंजीनियरिंग अनुभव ने मुझे दूसरी बार उछाल परिवर्तन मॉड्यूल में महारत हासिल करने में मदद की: मैंने एक अधिक शक्तिशाली सर्वो, एक मोटी थ्रेडेड रॉड और एक नट लिया, जिसे मैंने पिस्टन पर तय किया। इस बार मैं सर्वो के संशोधन से परेशान नहीं था, मैंने फैसला किया कि बाहरी ड्राइवर का उपयोग करना और सीधे इमदादी मोटर से जुड़ना आसान है।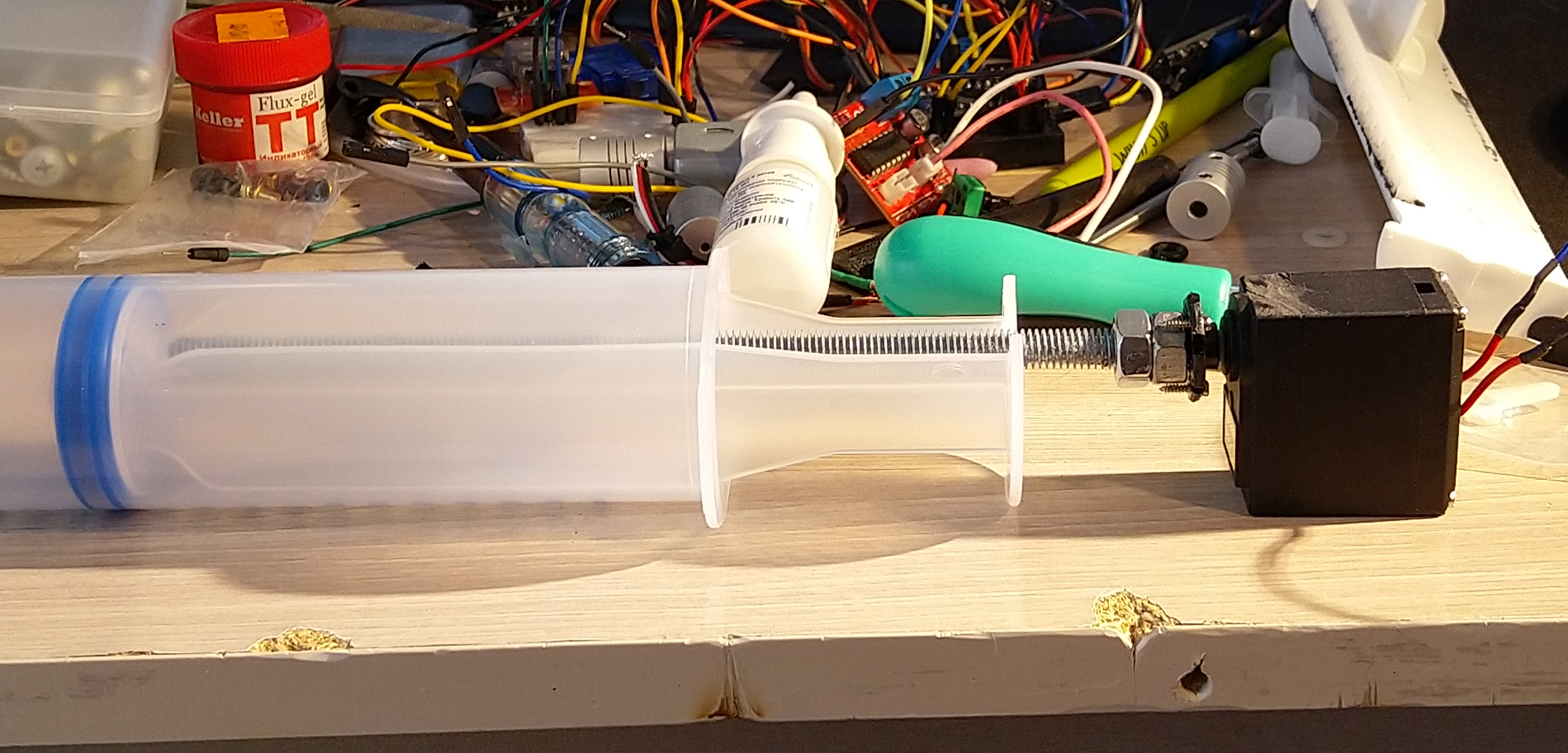
कठोरता के लिए एल्यूमीनियम फ्रेम पिस्टन पर एक लेजर रेंजफाइंडर रखा गया था ताकि मैं वास्तविक समय में यह निर्धारित कर सकूं कि यह अब किस स्थिति में है। खैर, इस दूरी के आंकड़ों के आधार पर, मैंने एक पिस्टन लॉक निर्धारित किया जब यह चरम स्थिति में है। शायद पिस्टन की स्थिति निर्धारित करने के लिए सरल तरीके हैं, लेकिन मुझे गलती से चीनी से बहुत सस्ता मॉड्यूल मिला - वीएल 53 एल 0 एक्स रेंज फाइंडर और इसका उपयोग करने का फैसला किया। नतीजतन, मैं बहुत प्रसन्न था, पुस्तकालय सरल है, यह काम करता है जैसा कि मुझे चाहिए, मैं सलाह देता हूं। सिरिंज की सीमित जगह में सटीकता लगभग 5 मिमी है, सिद्धांत रूप में, मेरे लिए यह पर्याप्त था।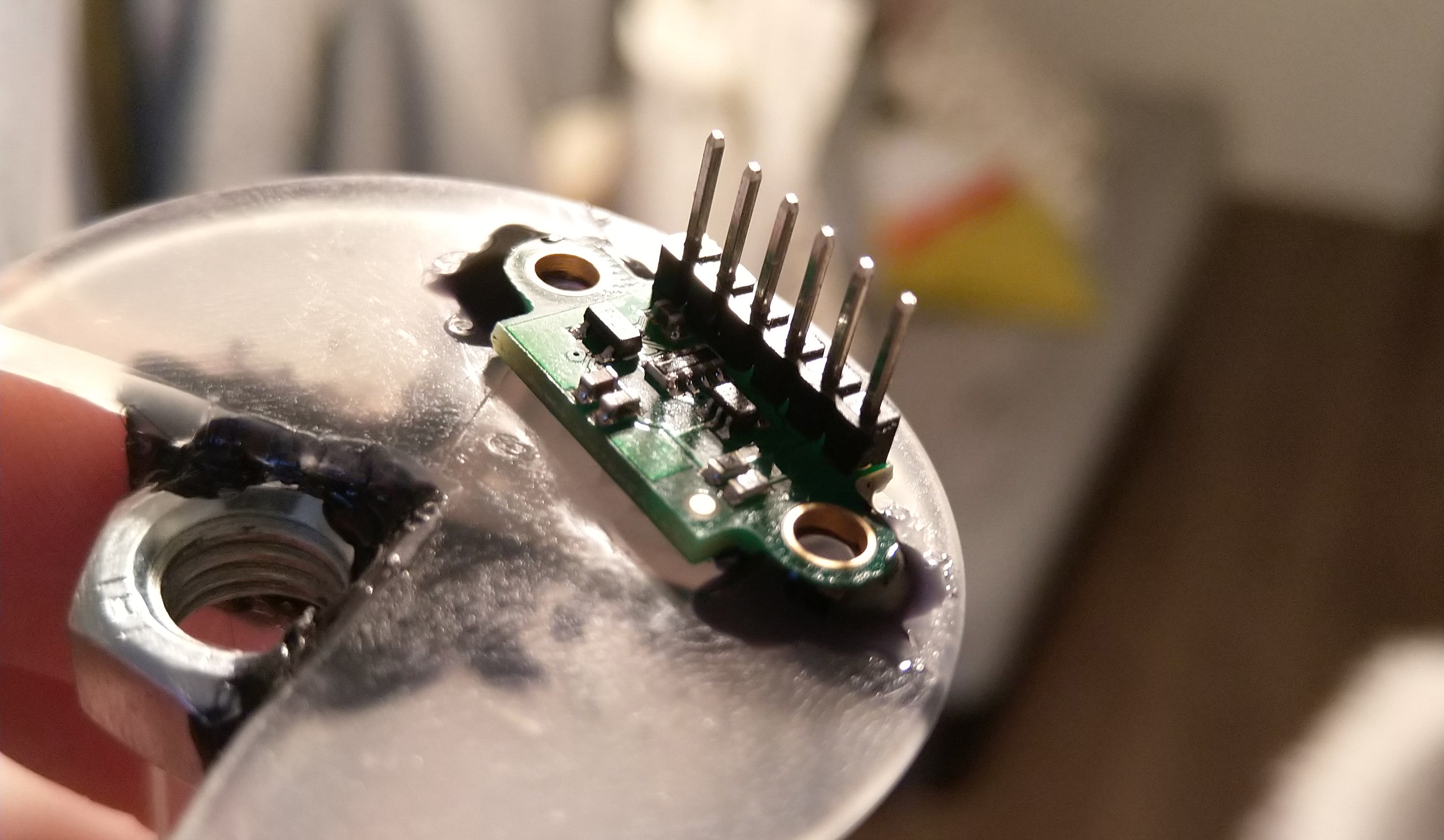 परीक्षण के दौरान, एक और समस्या उत्पन्न हुई - पिस्टन सिरिंज की दीवारों का दृढ़ता से पालन करता है। मुझे नहीं पता कि यह किसके साथ जुड़ा हुआ है, लेकिन पिस्टन के आंदोलन को शुरू करने के लिए यह काफी बल लागू करना आवश्यक है, शुरुआती जाम के बाद यह सामान्य रूप से चलता है। हमने लगभग सभी प्रकार के स्नेहक की कोशिश की - उनमें से कई ने इसे बदतर बना दिया। इस कारण से, मुझे मॉड्यूल के लिए एक एल्यूमीनियम फ्रेम जोड़ना पड़ा।
परीक्षण के दौरान, एक और समस्या उत्पन्न हुई - पिस्टन सिरिंज की दीवारों का दृढ़ता से पालन करता है। मुझे नहीं पता कि यह किसके साथ जुड़ा हुआ है, लेकिन पिस्टन के आंदोलन को शुरू करने के लिए यह काफी बल लागू करना आवश्यक है, शुरुआती जाम के बाद यह सामान्य रूप से चलता है। हमने लगभग सभी प्रकार के स्नेहक की कोशिश की - उनमें से कई ने इसे बदतर बना दिया। इस कारण से, मुझे मॉड्यूल के लिए एक एल्यूमीनियम फ्रेम जोड़ना पड़ा।मोटर्स
प्रणोदन प्रणाली के साथ, मैं सबसे सरल समाधान पर बस गया और तैयार पानी के नीचे की मोटरें लीं। इससे पहले, मैंने मामले के अंदर एक मोटर के साथ विकल्प का परीक्षण किया। मैंने एक शाफ्ट और शिकंजा के साथ एक सेट में एक कठोर ट्यूब का आदेश दिया, लेकिन जैसा कि मैंने इस मुद्दे का अध्ययन किया, यह पता चला कि मेरे उद्देश्यों के लिए मुझे एक पूरी प्रणाली की आवश्यकता थी: एक जटिल तेल सील, flanges, आदि। अन्यथा, यह किसी भी मामले में आगे बढ़ेगा। मेरे पास भविष्य की योजना है कि लैडोगा पर पनडुब्बी को कहीं फेंक दिया जाए और इसे 3 जी नेटवर्क के माध्यम से प्रबंधित किया जाए, जो कि सोफे पर घर बैठे हैं, जिसका अर्थ है कि किसी भी संभावित लीक से डिवाइस की थोड़ी स्वायत्तता हो जाएगी। भविष्य में मैं केवल पानी के नीचे की मोटरों का उपयोग करने की योजना बनाता हूं, सबसे अधिक संभावना ब्रशलेस। फिलहाल, इनका उपयोग किया जाता है, कलेक्टर:
भविष्य में मैं केवल पानी के नीचे की मोटरों का उपयोग करने की योजना बनाता हूं, सबसे अधिक संभावना ब्रशलेस। फिलहाल, इनका उपयोग किया जाता है, कलेक्टर: मैं PWM का उपयोग करके उन्हें नियंत्रित करता हूं। विक्रेता का कहना है कि वे अधिकतम 8 मीटर गहरे हैं, जो फिर से, तुरंत कुछ प्रतिबंध लगाते हैं।
मैं PWM का उपयोग करके उन्हें नियंत्रित करता हूं। विक्रेता का कहना है कि वे अधिकतम 8 मीटर गहरे हैं, जो फिर से, तुरंत कुछ प्रतिबंध लगाते हैं।आवास
मामला एक दिलचस्प काम था - एक सीलबंद कनेक्शन बनाने के लिए, जिसे आसानी से विघटित किया जाएगा। मैंने कार्य पूरा नहीं किया, मुझे सब कुछ कसकर गोंद करना पड़ा। जब सिरिंज पानी खींचता है, तो शरीर के अंदर दबाव पैदा होता है और हमारे सभी फास्टनरों को बस बाहर निचोड़ा जाता है। नतीजतन, सभी महत्वपूर्ण तारों को एक सील कनेक्टर में लाया गया था, जिसके माध्यम से आप डिवाइस को चार्ज कर सकते हैं, और जहाज पर Arduino को फ्लैश कर सकते हैं, और एंटीना कनेक्ट कर सकते हैं।हां, हमारा एंटीना एक केबल का उपयोग करके जुड़ा हुआ है और सतह की स्थिति में है, विश्वसनीय संचार की गारंटी देता है। लेकिन ऐन्टेना के बारे में थोड़ा बाद में। आवास में 50 मिमी पॉलीप्रोपाइलीन पाइप और कपलिंग शामिल हैं। जोड़ों को सील पेस्ट के साथ कवर किया जाता है, और शीर्ष पर, ताकत के लिए, गर्म पिघल से भरा होता है। एक सिरिंज नोजल, एक एयरटाइट कनेक्टर, एक समावेश टॉगल स्विच और सर्चलाइट के लिए दो तारों को अंत में लाया गया था। बाढ़ वाले हिस्से के धनुष पर घुड़सवार फ्लडलाइट्स, इस डिजाइन ने गुरुत्वाकर्षण के केंद्र को पनडुब्बी के केंद्र के करीब स्थानांतरित करने की अनुमति दी।
आवास में 50 मिमी पॉलीप्रोपाइलीन पाइप और कपलिंग शामिल हैं। जोड़ों को सील पेस्ट के साथ कवर किया जाता है, और शीर्ष पर, ताकत के लिए, गर्म पिघल से भरा होता है। एक सिरिंज नोजल, एक एयरटाइट कनेक्टर, एक समावेश टॉगल स्विच और सर्चलाइट के लिए दो तारों को अंत में लाया गया था। बाढ़ वाले हिस्से के धनुष पर घुड़सवार फ्लडलाइट्स, इस डिजाइन ने गुरुत्वाकर्षण के केंद्र को पनडुब्बी के केंद्र के करीब स्थानांतरित करने की अनुमति दी।पनडुब्बी दिमाग
यह मेरे लिए सबसे दिलचस्प हिस्सा है। जब मैंने सर्किट को काम करना शुरू किया, तब भी मुझे नहीं पता था कि कैसे, उदाहरण के लिए, कैपेसिटर काम करते हैं और उनकी आवश्यकता क्यों है। मुझे बहुत खुशी हुई, जब बिजली बंद करते समय, एक कैपेसिटिव कैपेसिटर के कारण Arduino पर एलईडी धीरे-धीरे फीका हो गया।वास्तव में, वे कलेक्टर मोटर्स के संचालन के कारण सर्किट में उत्पन्न होने वाली चोटियों को चिकना करने के लिए सर्किट में उपयोगी थे। उन्हें वोल्टेज नियामक को जोड़ने के लिए भी आवश्यक है।हमारे पास दो कोशिकाओं की एक बैटरी है, क्रमशः 8.4 वी, वोल्टेज मोटरों में जाता है, और 5 वी स्टेबलाइजर के बाद - अरुडिनो और अन्य सेंसर के लिए। पूर्ण आकार की योजना (क्लिक करने योग्य):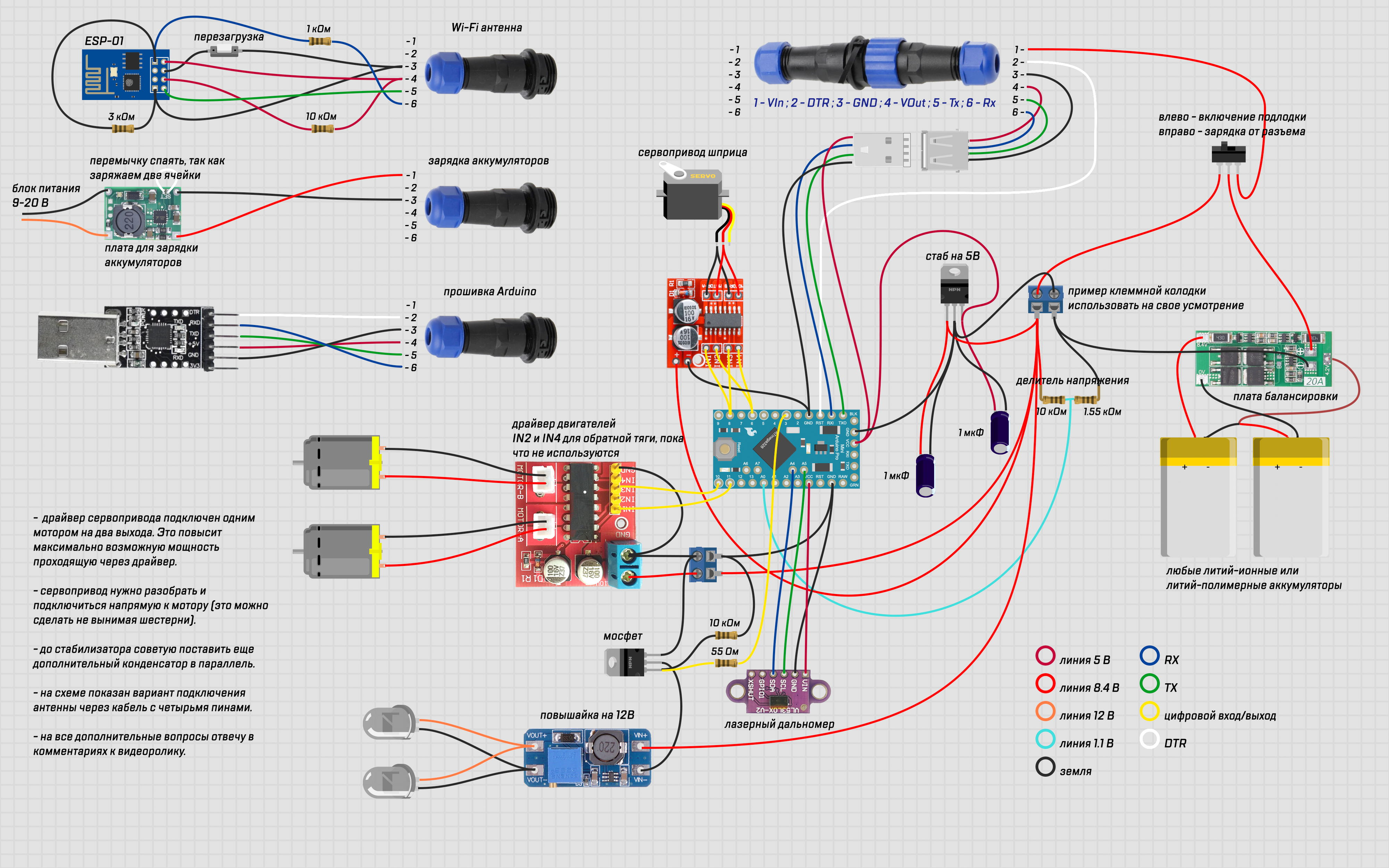 सबसे पहले, बहुत कुछ सिर्फ इस कारण से काम नहीं किया कि मैंने सब कुछ ब्रेडबोर्ड पर एकत्र किया। मैं अभी समझ नहीं पाया कि सर्किट का यह या वह हिस्सा काम क्यों नहीं करता है। नतीजतन, सब कुछ मिलाप करने लगा और सकारात्मक परीक्षण के परिणाम आने में लंबे समय तक नहीं थे।
सबसे पहले, बहुत कुछ सिर्फ इस कारण से काम नहीं किया कि मैंने सब कुछ ब्रेडबोर्ड पर एकत्र किया। मैं अभी समझ नहीं पाया कि सर्किट का यह या वह हिस्सा काम क्यों नहीं करता है। नतीजतन, सब कुछ मिलाप करने लगा और सकारात्मक परीक्षण के परिणाम आने में लंबे समय तक नहीं थे।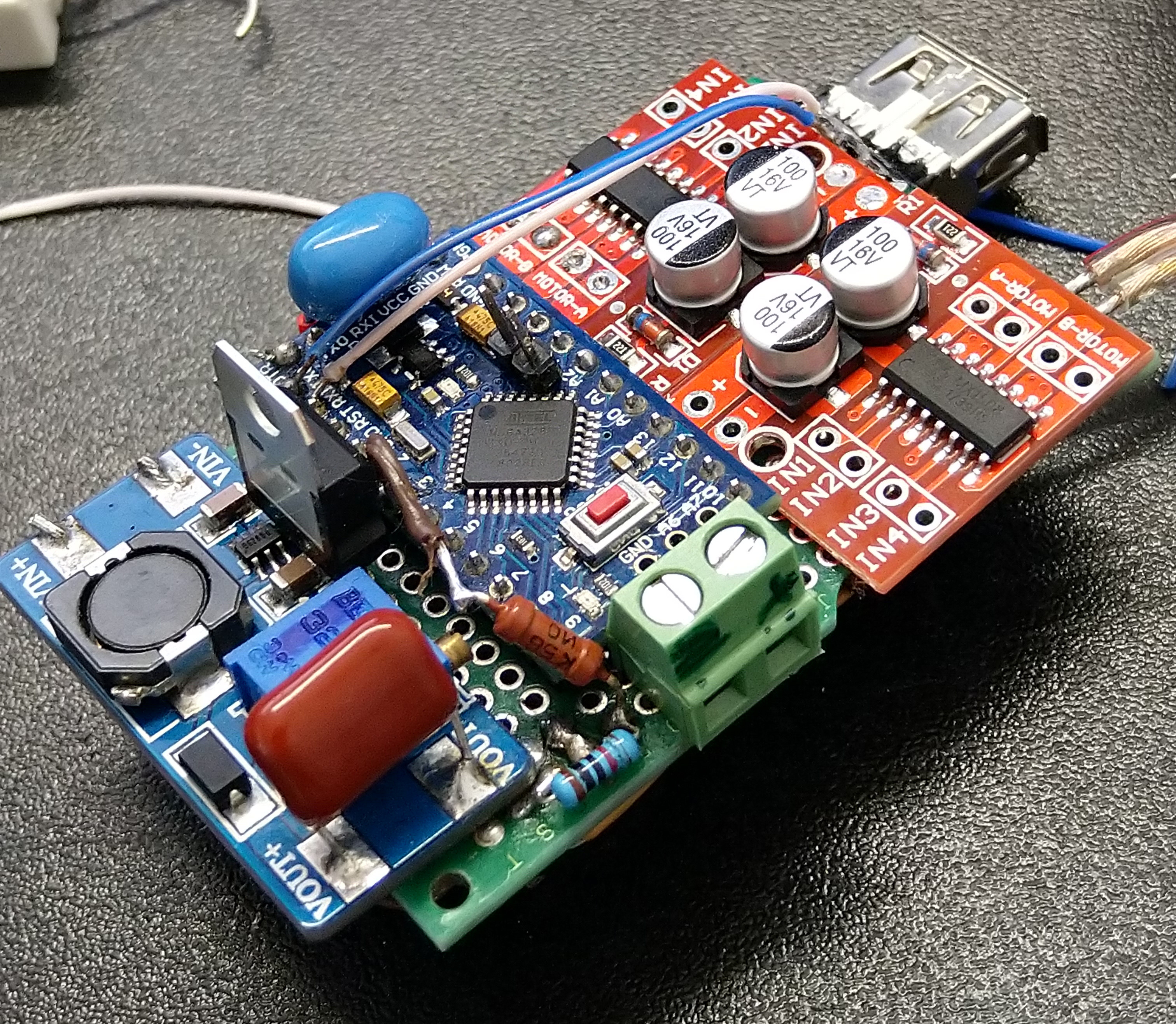 दिलचस्प समस्याओं में से एक रेंजफाइंडर के साथ उत्पन्न हुई। उसके पास एक अच्छी लाइब्रेरी है, लेकिन अगर आप सटीकता मोड को मध्यम या उच्च पर सेट करते हैं, तो पूरा स्केच धीमा हो जाएगा और नियंत्रण 2000 एमएस न्यूनतम के एक पिंग के साथ बाहर आ जाएगा। इस वजह से, रेंज फाइंडर FAST मोड में है, लेकिन इसकी सटीकता अभी भी हमारे कार्यों के लिए पर्याप्त है।अगली बात जो मुझे पता चली वह है केबल प्रबंधन। केस व्यास 50 मिमी। ऐसा लगता है कि यह बहुत कुछ है, जब तक कि आप सब कुछ अंदर रखने की कोशिश शुरू नहीं करते। मैंने ऑडियो के लिए डिज़ाइन किए गए सीधे बोल्ड केबलों का उपयोग किया, जो मुझे बहुत नीचे गिरा देते हैं। मैं सिर्फ तांबे चाहता था, क्योंकि यह उन्हें मिलाप करने के लिए सुविधाजनक है, और ताकि वे टूट न जाएं, जैसे कि एल्यूमीनियम वाले। अगली बार मैं अच्छे तारों की तलाश में अधिक समय बिताऊंगा।
दिलचस्प समस्याओं में से एक रेंजफाइंडर के साथ उत्पन्न हुई। उसके पास एक अच्छी लाइब्रेरी है, लेकिन अगर आप सटीकता मोड को मध्यम या उच्च पर सेट करते हैं, तो पूरा स्केच धीमा हो जाएगा और नियंत्रण 2000 एमएस न्यूनतम के एक पिंग के साथ बाहर आ जाएगा। इस वजह से, रेंज फाइंडर FAST मोड में है, लेकिन इसकी सटीकता अभी भी हमारे कार्यों के लिए पर्याप्त है।अगली बात जो मुझे पता चली वह है केबल प्रबंधन। केस व्यास 50 मिमी। ऐसा लगता है कि यह बहुत कुछ है, जब तक कि आप सब कुछ अंदर रखने की कोशिश शुरू नहीं करते। मैंने ऑडियो के लिए डिज़ाइन किए गए सीधे बोल्ड केबलों का उपयोग किया, जो मुझे बहुत नीचे गिरा देते हैं। मैं सिर्फ तांबे चाहता था, क्योंकि यह उन्हें मिलाप करने के लिए सुविधाजनक है, और ताकि वे टूट न जाएं, जैसे कि एल्यूमीनियम वाले। अगली बार मैं अच्छे तारों की तलाश में अधिक समय बिताऊंगा।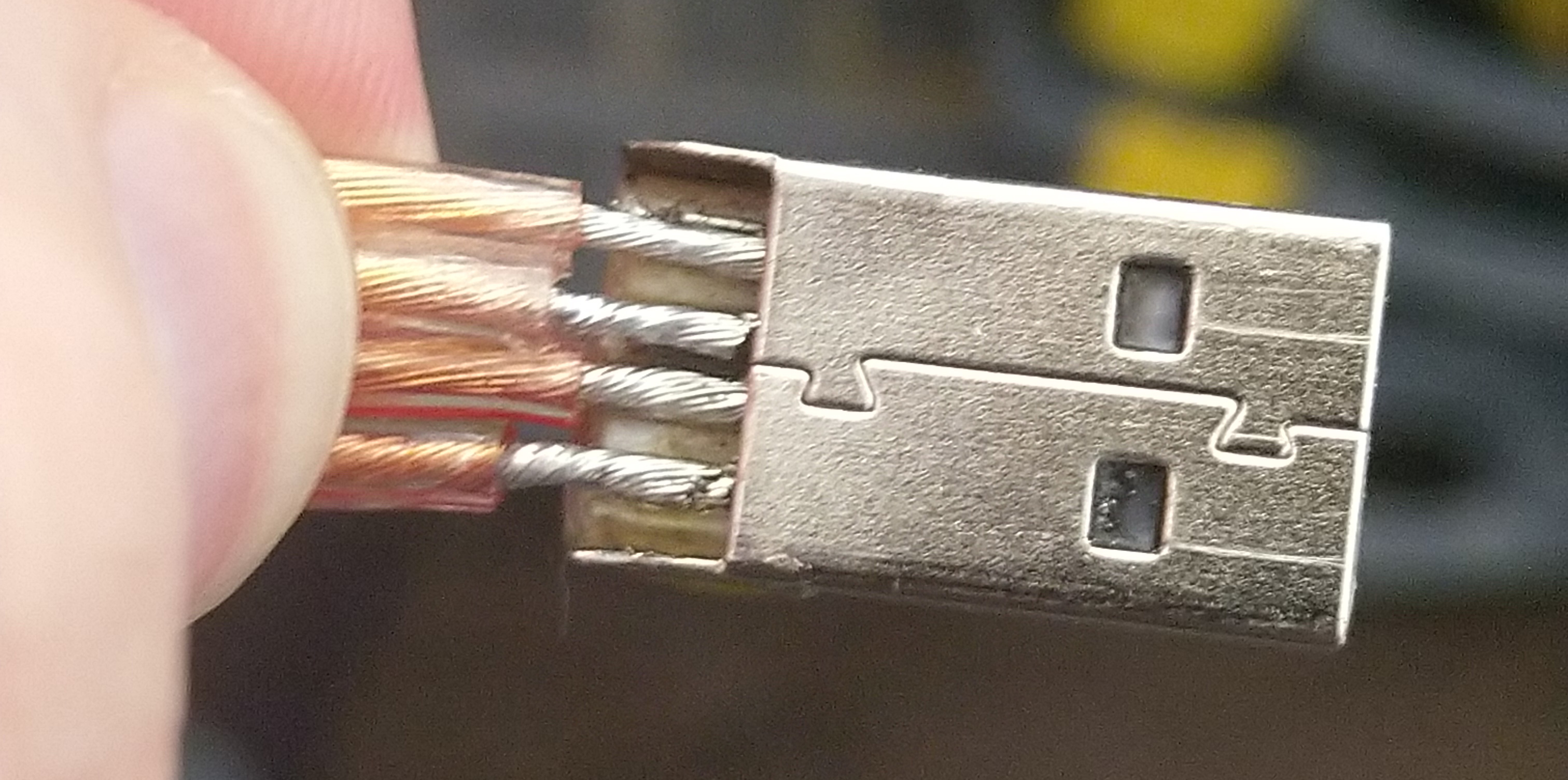
 आगे की मुश्किलें एंटीना के साथ ही पैदा हुईं।
आगे की मुश्किलें एंटीना के साथ ही पैदा हुईं।एंटीना
एक एंटीना के रूप में, मैंने वाई-फाई के माध्यम से एक स्मार्टफोन के माध्यम से esp8266 का उपयोग करने और पनडुब्बी को नियंत्रित करने का फैसला किया। ESP8266 के आधार पर केवल चीनी के पास विविध प्रकार के मॉड्यूल हैं, मैंने तीन अलग-अलग खरीदे, लेकिन मैं उनमें से केवल एक को जोड़ने और फ्लैश करने में सक्षम था - ESP-01 ।सिद्धांत रूप में, यदि आप अभी ऑर्डर करते हैं, तो वे पहले से ही आवश्यक फर्मवेयर के साथ होंगे। प्रबंधन RemoteXY के माध्यम से है, और उसे एटी कमांड्स के लिए एक विशिष्ट फर्मवेयर संस्करण की आवश्यकता है। AT कमांड के माध्यम से नियंत्रित करने के लिए सही फर्मवेयर खोजने की समस्या को केवल RemoteXY गाइड की मदद से हल किया गया था। वैसे, विज्ञापन नहीं, मुझे केवल इंटरफ़ेस पसंद आया, और उसके बाद ही मुझे सभी प्रकार के IoT के लिए अधिक सुविधाजनक और अच्छी तरह से विकसित इंटरफ़ेस डिजाइनर मिले।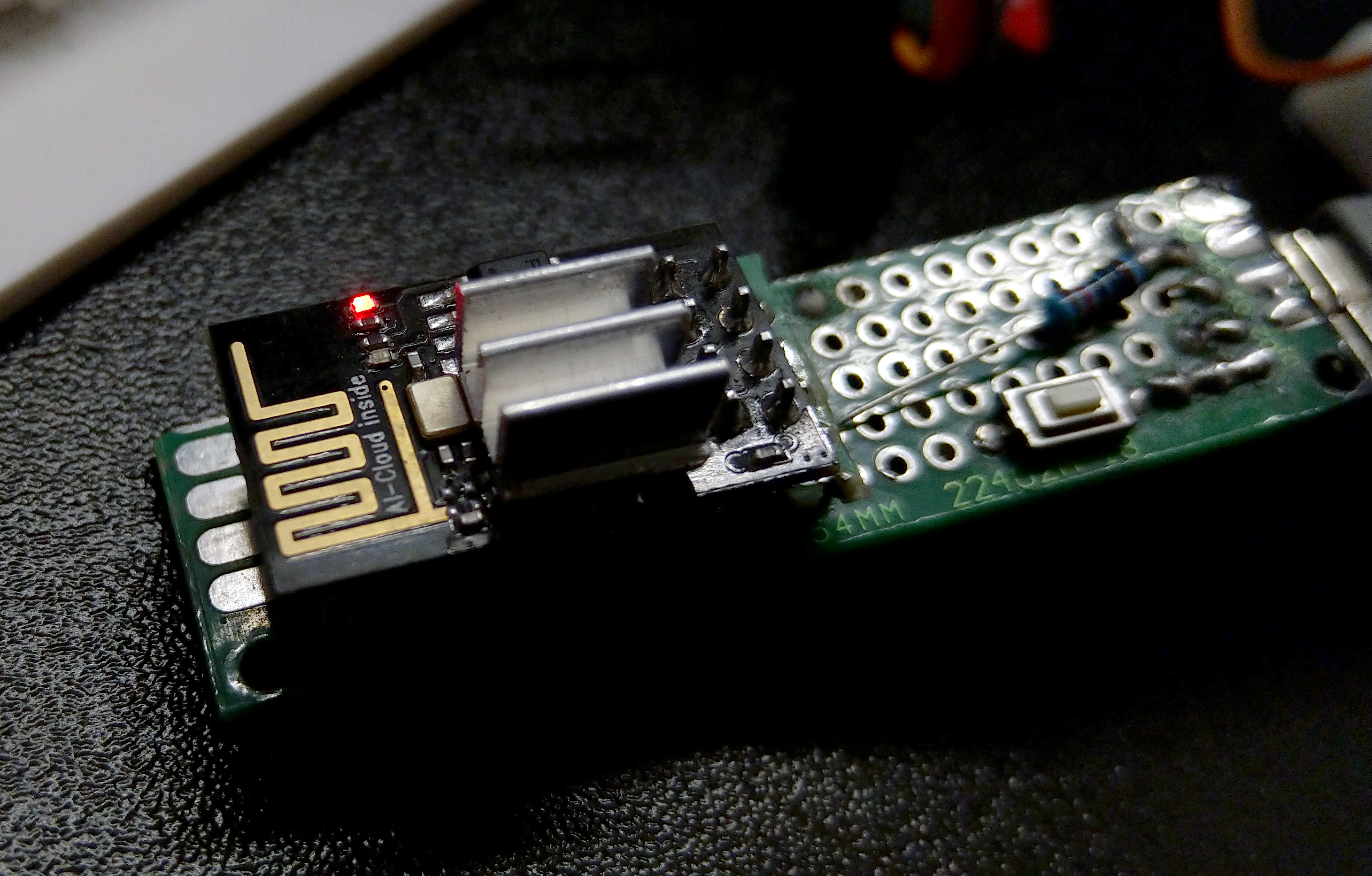 सफल फर्मवेयर के बाद, मैंने काम के लिए आवश्यक घटकों के साथ मॉड्यूल लटका दिया और सुविधाजनक कनेक्शन के लिए एक यूएसबी कनेक्टर को मिला दिया। एक नियमित बोतल के नीचे से कॉर्क में यूएसबी मेट को एकीकृत किया और हमें केस (बॉटल रिप्लेसमेंट) को बदलने की क्षमता वाला एक साधारण वायर्ड एंटीना मिला।
सफल फर्मवेयर के बाद, मैंने काम के लिए आवश्यक घटकों के साथ मॉड्यूल लटका दिया और सुविधाजनक कनेक्शन के लिए एक यूएसबी कनेक्टर को मिला दिया। एक नियमित बोतल के नीचे से कॉर्क में यूएसबी मेट को एकीकृत किया और हमें केस (बॉटल रिप्लेसमेंट) को बदलने की क्षमता वाला एक साधारण वायर्ड एंटीना मिला। फर्मवेयर के अलावा और भी समस्याएं थीं।ESP-01 बोर्ड को 3.3 V से काम करना चाहिए, न कि 5 V से। इसके अलावा, तर्क और बिजली की आपूर्ति दोनों। यदि मैंने एक स्तर कनवर्टर के माध्यम से तर्क को कॉन्फ़िगर किया, तो मैं भी शक्ति के साथ गड़बड़ करने के लिए बहुत आलसी था और मैंने बस चिप पर एक छोटा रेडिएटर बच्चा चिपका दिया। पांच वोल्ट से यह ठीक काम करता है, लेकिन यह बहुत गर्म होता है। अंत में रेडिएटर चिप को न जलाने में मदद करता है।
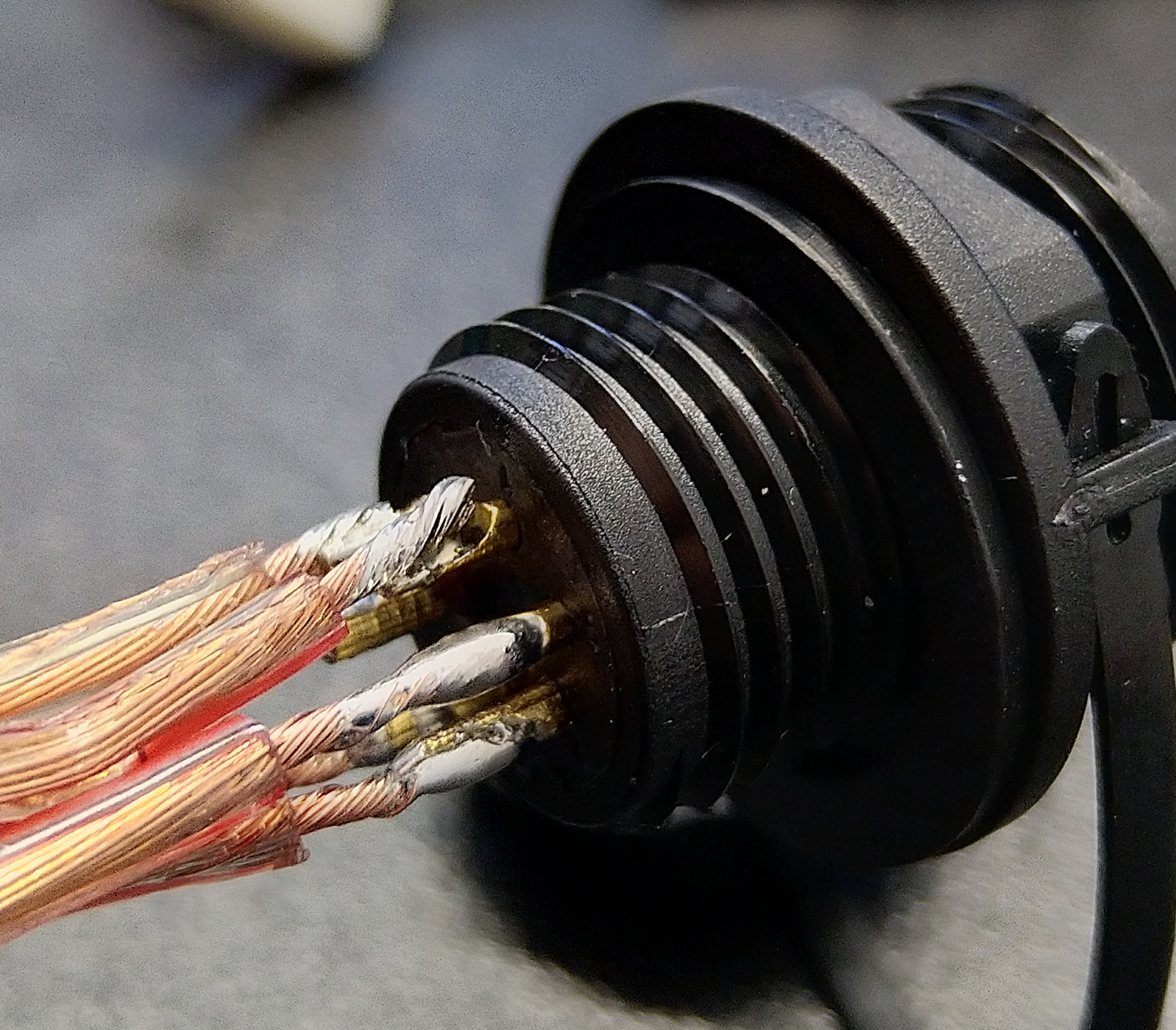
फर्मवेयर के अलावा और भी समस्याएं थीं।ESP-01 बोर्ड को 3.3 V से काम करना चाहिए, न कि 5 V से। इसके अलावा, तर्क और बिजली की आपूर्ति दोनों। यदि मैंने एक स्तर कनवर्टर के माध्यम से तर्क को कॉन्फ़िगर किया, तो मैं भी शक्ति के साथ गड़बड़ करने के लिए बहुत आलसी था और मैंने बस चिप पर एक छोटा रेडिएटर बच्चा चिपका दिया। पांच वोल्ट से यह ठीक काम करता है, लेकिन यह बहुत गर्म होता है। अंत में रेडिएटर चिप को न जलाने में मदद करता है।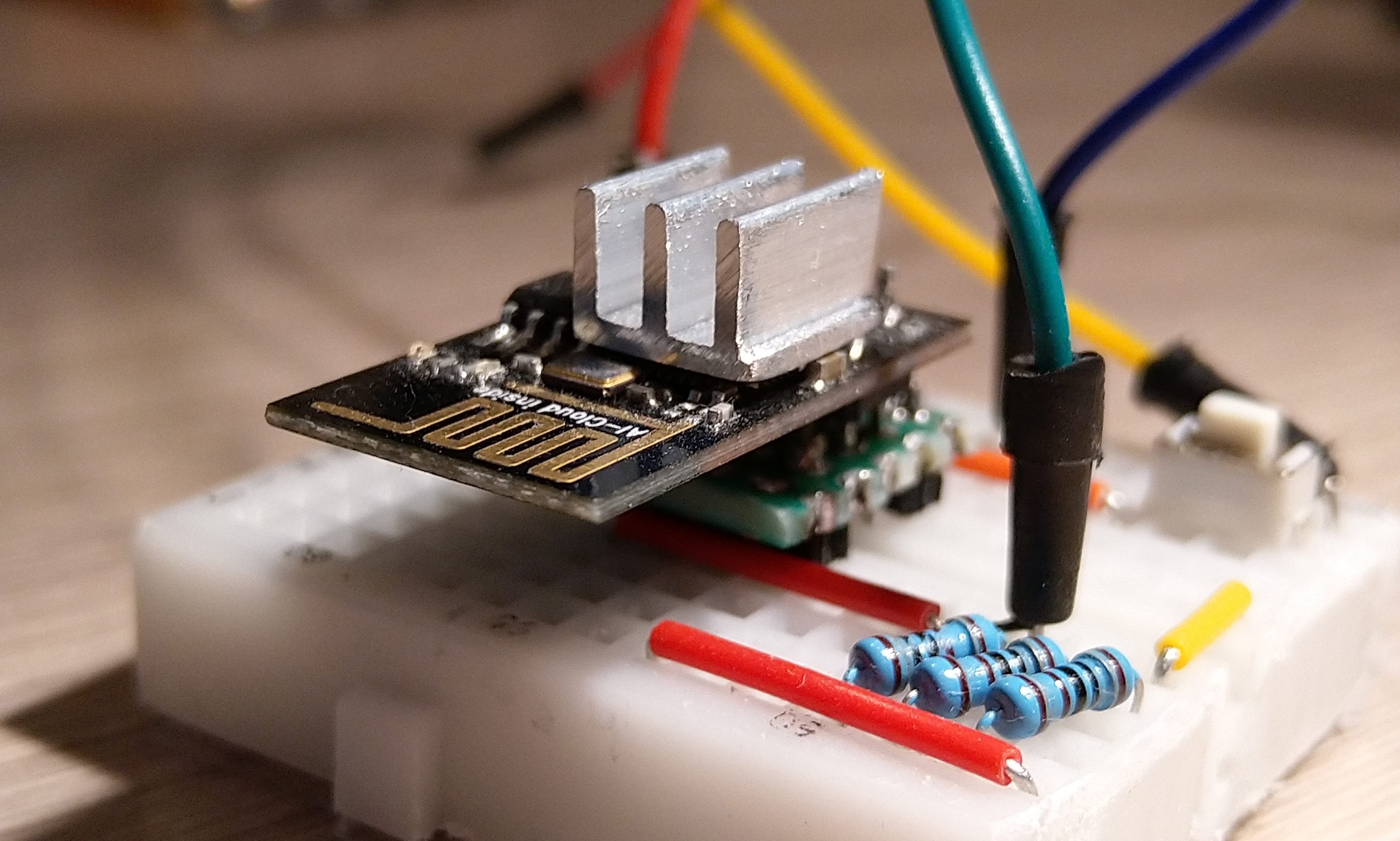 एक अन्य समस्या - मैंने सील कनेक्टर के लिए आदर्श केबल उठाया, लेकिन यह परिरक्षण के साथ केवल 2 पिन है, जबकि एंटीना के लिए आपको एंटीना पर 4 और पावर और एंटीना (बोर्ड पर एंटीना और अरुडिनो के बीच संचार के लिए) की आवश्यकता होती है।यह पता चला कि हमारे एंटीना को अलग से बिजली देना संभव नहीं होगा, क्योंकि ESP + Arduino के काम करने के लिए, एक सामान्य जमीन होना आवश्यक था। मुझे केबल के पास जमीन के रूप में परिरक्षण का उपयोग करना था, और एंटीना के लिए एक अलग बैटरी जोड़ना था। असुविधाजनक, लेकिन यह काम करता है। बेशक, यह आसान 4 कोर के लिए एक केबल खोजने और पनडुब्बी से बैटरी के साथ एंटीना को खिलाने के लिए है।
एक अन्य समस्या - मैंने सील कनेक्टर के लिए आदर्श केबल उठाया, लेकिन यह परिरक्षण के साथ केवल 2 पिन है, जबकि एंटीना के लिए आपको एंटीना पर 4 और पावर और एंटीना (बोर्ड पर एंटीना और अरुडिनो के बीच संचार के लिए) की आवश्यकता होती है।यह पता चला कि हमारे एंटीना को अलग से बिजली देना संभव नहीं होगा, क्योंकि ESP + Arduino के काम करने के लिए, एक सामान्य जमीन होना आवश्यक था। मुझे केबल के पास जमीन के रूप में परिरक्षण का उपयोग करना था, और एंटीना के लिए एक अलग बैटरी जोड़ना था। असुविधाजनक, लेकिन यह काम करता है। बेशक, यह आसान 4 कोर के लिए एक केबल खोजने और पनडुब्बी से बैटरी के साथ एंटीना को खिलाने के लिए है। फोटो में सील कनेक्टर पर केबल, सिलिकॉन ट्यूब और समेटना छेद के व्यास का एक अच्छा संयोग है।
फोटो में सील कनेक्टर पर केबल, सिलिकॉन ट्यूब और समेटना छेद के व्यास का एक अच्छा संयोग है।प्रबंधन और फर्मवेयर
प्रबंधन स्मार्टफोन से इंटरफेस के माध्यम से किया जाता है। इंटरफ़ेस साइट पर सीधे तैयार मॉड्यूल से बना था, इंटरफ़ेस का स्रोत कोड प्राप्त किया, और फिर यह फर्मवेयर के अंदर के कार्यों के लिए इंटरफ़ेस के विभिन्न तत्वों को बांधने के लिए बना रहा।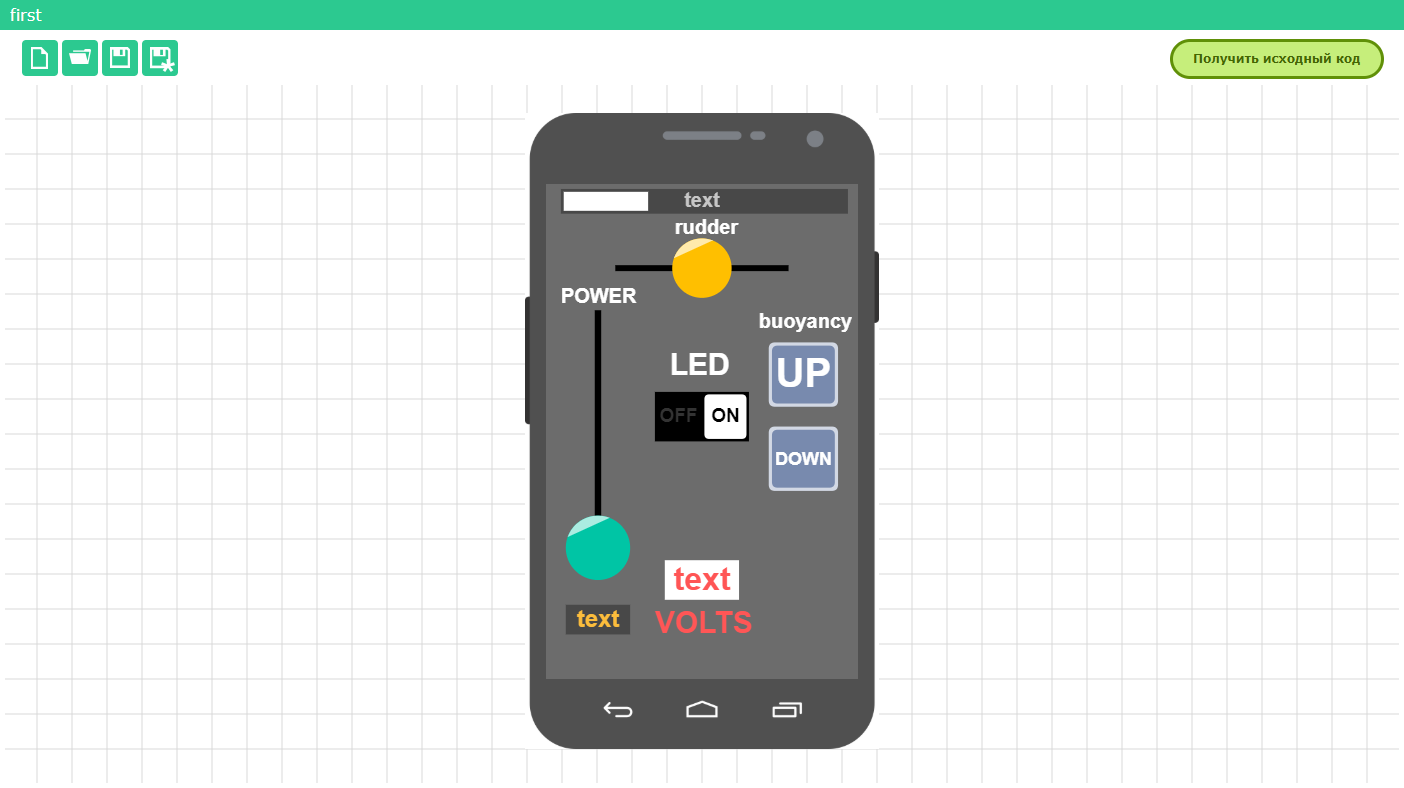 इंटरफ़ेस का स्रोत कोड प्राप्त करने से पहले, आपको सेटिंग्स में वायरलेस मॉड्यूल के प्रकार को निर्दिष्ट करना होगा जिसके साथ Arduino इंटरैक्ट करेगा। हम केवल Arduino को फ्लैश करते हैं - वाई-फाई मॉड्यूल के साथ, संचार एटी कमांड के माध्यम से स्वचालित रूप से होता है। एक पहुंच बिंदु बनाया गया है, इसे स्मार्टफोन से कनेक्ट करें और इसे पहले से इंस्टॉल किए गए एप्लिकेशन के माध्यम से नियंत्रित करें। इंटरफ़ेस Arduino से आता है, इसे फर्मवेयर में वायर्ड किया जाता है और इसे स्मार्टफोन में ही एप्लिकेशन द्वारा पहचाना जाता है।यह मेरा पहला पहला कोड था, मैंने इसे यहीं नहीं छोड़ा, क्योंकि यह केवल बुनियादी प्रोग्रामिंग कौशल और बुनियादी गणित का उपयोग करता है। मेरे लिए कुछ मुश्किल क्षण थे - मैं पहली बार सामान्य तार्किक ऑपरेशन नहीं कर सका - ताकि कुछ निश्चित मूल्यों पर सिरिंज की सर्वो-ड्राइव एकतरफा आंदोलन के लिए अवरुद्ध हो जाए।उदाहरण के लिए, जब पानी की अधिकतम मात्रा की बात आती है, तो पिस्टन को पीछे की ओर रोकना चाहिए, लेकिन आगे को अवरुद्ध नहीं करना चाहिए। और इसके विपरीत, जब सभी पानी बाहर निचोड़ा जाता है, तो पिस्टन को आगे नहीं जाना चाहिए, लेकिन बिना किसी समस्या के रिटर्न कमांड निष्पादित करें।
इंटरफ़ेस का स्रोत कोड प्राप्त करने से पहले, आपको सेटिंग्स में वायरलेस मॉड्यूल के प्रकार को निर्दिष्ट करना होगा जिसके साथ Arduino इंटरैक्ट करेगा। हम केवल Arduino को फ्लैश करते हैं - वाई-फाई मॉड्यूल के साथ, संचार एटी कमांड के माध्यम से स्वचालित रूप से होता है। एक पहुंच बिंदु बनाया गया है, इसे स्मार्टफोन से कनेक्ट करें और इसे पहले से इंस्टॉल किए गए एप्लिकेशन के माध्यम से नियंत्रित करें। इंटरफ़ेस Arduino से आता है, इसे फर्मवेयर में वायर्ड किया जाता है और इसे स्मार्टफोन में ही एप्लिकेशन द्वारा पहचाना जाता है।यह मेरा पहला पहला कोड था, मैंने इसे यहीं नहीं छोड़ा, क्योंकि यह केवल बुनियादी प्रोग्रामिंग कौशल और बुनियादी गणित का उपयोग करता है। मेरे लिए कुछ मुश्किल क्षण थे - मैं पहली बार सामान्य तार्किक ऑपरेशन नहीं कर सका - ताकि कुछ निश्चित मूल्यों पर सिरिंज की सर्वो-ड्राइव एकतरफा आंदोलन के लिए अवरुद्ध हो जाए।उदाहरण के लिए, जब पानी की अधिकतम मात्रा की बात आती है, तो पिस्टन को पीछे की ओर रोकना चाहिए, लेकिन आगे को अवरुद्ध नहीं करना चाहिए। और इसके विपरीत, जब सभी पानी बाहर निचोड़ा जाता है, तो पिस्टन को आगे नहीं जाना चाहिए, लेकिन बिना किसी समस्या के रिटर्न कमांड निष्पादित करें। if ((RemoteXY.button_1 == 1) && (RemoteXY.button_2 == 0) && (val_f < 100)) {
pwm_UP = 1;
pwm_DOWN = 0;
}
else if ((RemoteXY.button_1 == 0) && (RemoteXY.button_2 == 1) && (val_f > 25)) {
pwm_UP = 0;
pwm_DOWN = 1;
}
else {
pwm_UP = 0;
pwm_DOWN = 0;
}
यह अंत में तार्किक निर्माण है, जहां RemoteXY.button_ # डाइविंग या सरफेसिंग के लिए इंटरफ़ेस में बटन हैं।इसके अलावा, कोड में मेरे लिए कठिन भाग से, यह एक रेंज फाइंडर फिल्टर है (मैंने नेटवर्क में सबसे सरल में से एक लिया), अच्छी तरह से, वाल्टमीटर के लिए मान सेट करना। रेंजफाइंडर पर पूर्वोक्त FAST मोड के कारण फ़िल्टर की आवश्यकता थी, इनपुट मान बहुत अधिक उछले और फ़िल्टर ने इसके साथ सामना करने में मदद की। लेकिन बैटरी के निर्वहन का संकेत देने के लिए वोल्टमीटर उपयोगी था। Arduino में एक संदर्भ पिन है, और यदि 1.1 वोल्ट से अधिक इसे लागू नहीं किया जाता है, तो Arduino इस पिन को आपूर्ति किए गए वोल्टेज को सटीक रूप से निर्धारित करने में सक्षम होगा। हम वोल्टेज V के बाद 1.1 V को 1.1 V में परिवर्तित करते हैं। और यह रूपांतरण गलत निकला, मुझे फर्मवेयर में एक चर जोड़कर वोल्टेज मान को प्रयोगात्मक रूप से सही करना था।परिक्षण
अपेक्षाकृत साफ पानी के साथ एक परित्यक्त खदान पर परीक्षण किया गया था। परीक्षणों के लिए, कैमरे को ठीक करना और पनडुब्बी ट्रिम (मूल तटस्थ उछाल के साथ) को समायोजित करना आवश्यक था।पहला कार्य कैमरा माउंट के लिए सही पेंच स्थापित करके हल किया गया था। कैमरे के घुमाव से बचने के लिए, थोड़ी मिट्टी को जोड़ा गया था। ट्रिमर को एक बैग द्वारा शासित किया गया था, जो क्लैंप पर हुक करने के लिए सुविधाजनक था, और पहले से ही क्लैम्प को आसानी से पनडुब्बी के साथ स्थानांतरित किया जा सकता है। बैग में नटों की संख्या से, हम तटस्थ उछाल स्थापित करते हैं, और फिर हमने जल्दी से क्लैंप की स्थिति को उठाया ताकि पनडुब्बी अपनी नाक न काटे। इस विकल्प पर निर्णय खदान की यात्रा से ठीक पहले किया गया था, बस एक स्वचालित ट्रिम सिस्टम बनाने में कुछ समय नहीं बचा था। यह, सिद्धांत में, थ्रेडेड रॉड के साथ लोड को स्थानांतरित करके बनाना बहुत आसान है। अगली पनडुब्बी में मैं बिल्कुल यही विकल्प चुनूंगा। यहाँ, शायद, पूरी पनडुब्बी है।मैंने दो वीडियो रिकॉर्ड किए जहां मैं विधानसभा के बारे में अधिक विस्तार से बात करता हूं और उन शॉट्स को दिखाता हूं जिन्हें मैं पानी के नीचे शूट करने में कामयाब रहा। अच्छा होदेखने का:उम्मीद है कि सामग्री दिलचस्प थी। अगला दबाव चैंबर (उपकरण की जकड़न की जांच करने के लिए) और पानी के नीचे की परिधि के परीक्षणों पर प्रयोग होगा। उन पर मैं एक लेख के रूप में सामग्री भी तैयार करूंगा, लेकिन पहले से ही विभिन्न निर्णयों के ग्राफ और तुलना के साथ।
ट्रिमर को एक बैग द्वारा शासित किया गया था, जो क्लैंप पर हुक करने के लिए सुविधाजनक था, और पहले से ही क्लैम्प को आसानी से पनडुब्बी के साथ स्थानांतरित किया जा सकता है। बैग में नटों की संख्या से, हम तटस्थ उछाल स्थापित करते हैं, और फिर हमने जल्दी से क्लैंप की स्थिति को उठाया ताकि पनडुब्बी अपनी नाक न काटे। इस विकल्प पर निर्णय खदान की यात्रा से ठीक पहले किया गया था, बस एक स्वचालित ट्रिम सिस्टम बनाने में कुछ समय नहीं बचा था। यह, सिद्धांत में, थ्रेडेड रॉड के साथ लोड को स्थानांतरित करके बनाना बहुत आसान है। अगली पनडुब्बी में मैं बिल्कुल यही विकल्प चुनूंगा। यहाँ, शायद, पूरी पनडुब्बी है।मैंने दो वीडियो रिकॉर्ड किए जहां मैं विधानसभा के बारे में अधिक विस्तार से बात करता हूं और उन शॉट्स को दिखाता हूं जिन्हें मैं पानी के नीचे शूट करने में कामयाब रहा। अच्छा होदेखने का:उम्मीद है कि सामग्री दिलचस्प थी। अगला दबाव चैंबर (उपकरण की जकड़न की जांच करने के लिए) और पानी के नीचे की परिधि के परीक्षणों पर प्रयोग होगा। उन पर मैं एक लेख के रूप में सामग्री भी तैयार करूंगा, लेकिन पहले से ही विभिन्न निर्णयों के ग्राफ और तुलना के साथ।