मिलिए पेट्या से, जो छह टांगों वाले तीन नौकर हैं
मैं Arduino ब्रेन श्रृंखला से लेख प्रकाशित करना जारी रखता हूं। पेट्या एक बहुत सस्ता hexapods (दस रुपये के बारे में) है। यह एक बारिश के दिन के लिए एक अद्भुत परियोजना हो सकती है, जो वयस्कों और बच्चों दोनों का मनोरंजन करेगी। जब से हम मनोरंजन के बारे में बात कर रहे हैं, यहाँ पेटा के साथ एक वीडियो है जिसमें फंक संगीत है:
बेशक, मैंने कोई ध्वनि विश्लेषण नहीं किया, मैंने बस पेटिया को एक निश्चित लय में नृत्य करने के लिए प्रोग्राम किया। यहाँ एक और वीडियो है जिसमें पेट्या ने बाजीगरी गेंदों के लिए अपनी अवमानना को दिखाया है:
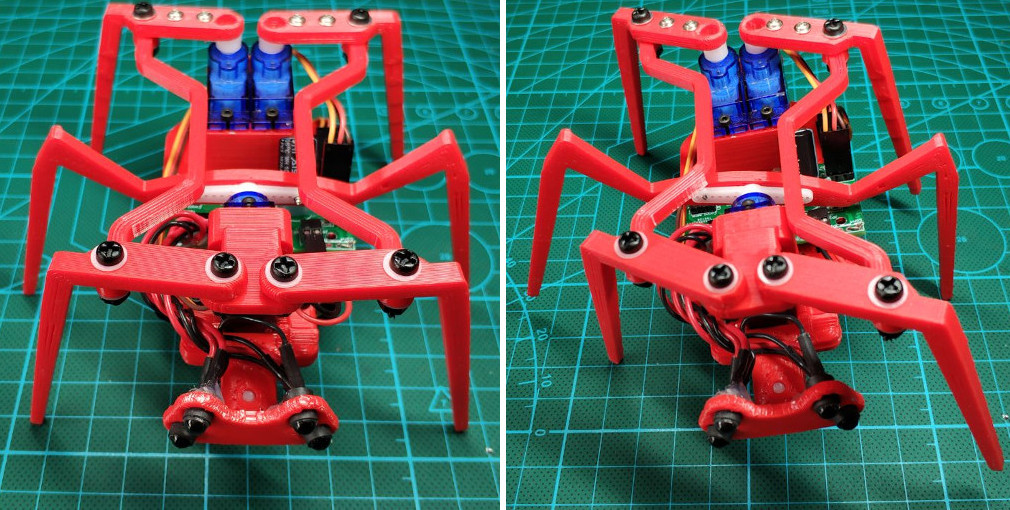
अपने वर्तमान रूप में, पेट्या केवल चल सकती है, लेकिन साथ ही वह आस-पास की बाधाओं को देख सकती है (दूरी को माप सकती है)। उनके दिमाग, हालांकि, उत्पादक हैं जो कई अन्य सेंसर से डेटा को पचाने में सक्षम हैं, अपने सुझाव भेजें!
पेट्या को कैसे क्लोन किया जाए
खरीदारी की सूची
3 , / . , :
- . , . - 10€ / 10 ( ), 2€ / 10 . , , . — , cheapduino - , .
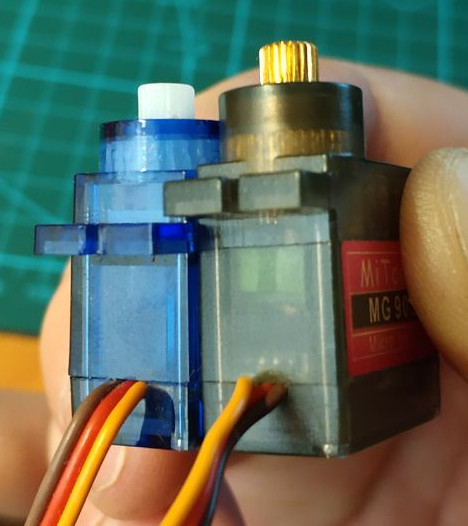
- SG90 9G , 3 * 1.47€ /
- 4x AAA , 1.34€ /
- ATMega8A-AU (QFP-32), 1€ /
- IR LED + IR , 0.20€ /
- 1000uF 16V, 0.17€ /
- 2n3904 , 3 * 0.01€ /
- , , , 0805 . : hardware/motherboard/BOM.html.
, , . (, ), . . — . , ;)
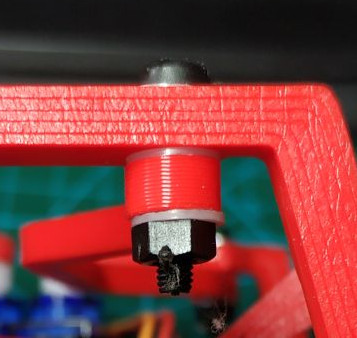
NB: 9g , . . , , , SketchUp . , , , .
, 3 , hardware/body/. - ::
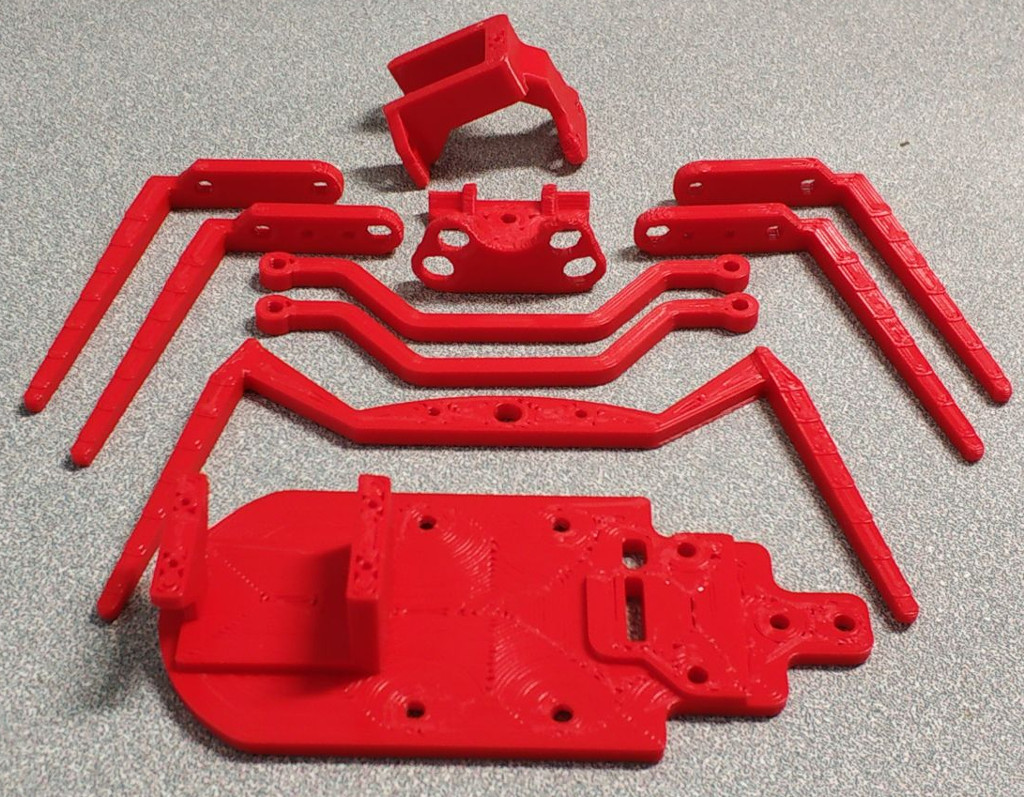
1, . - :

3 . , . :
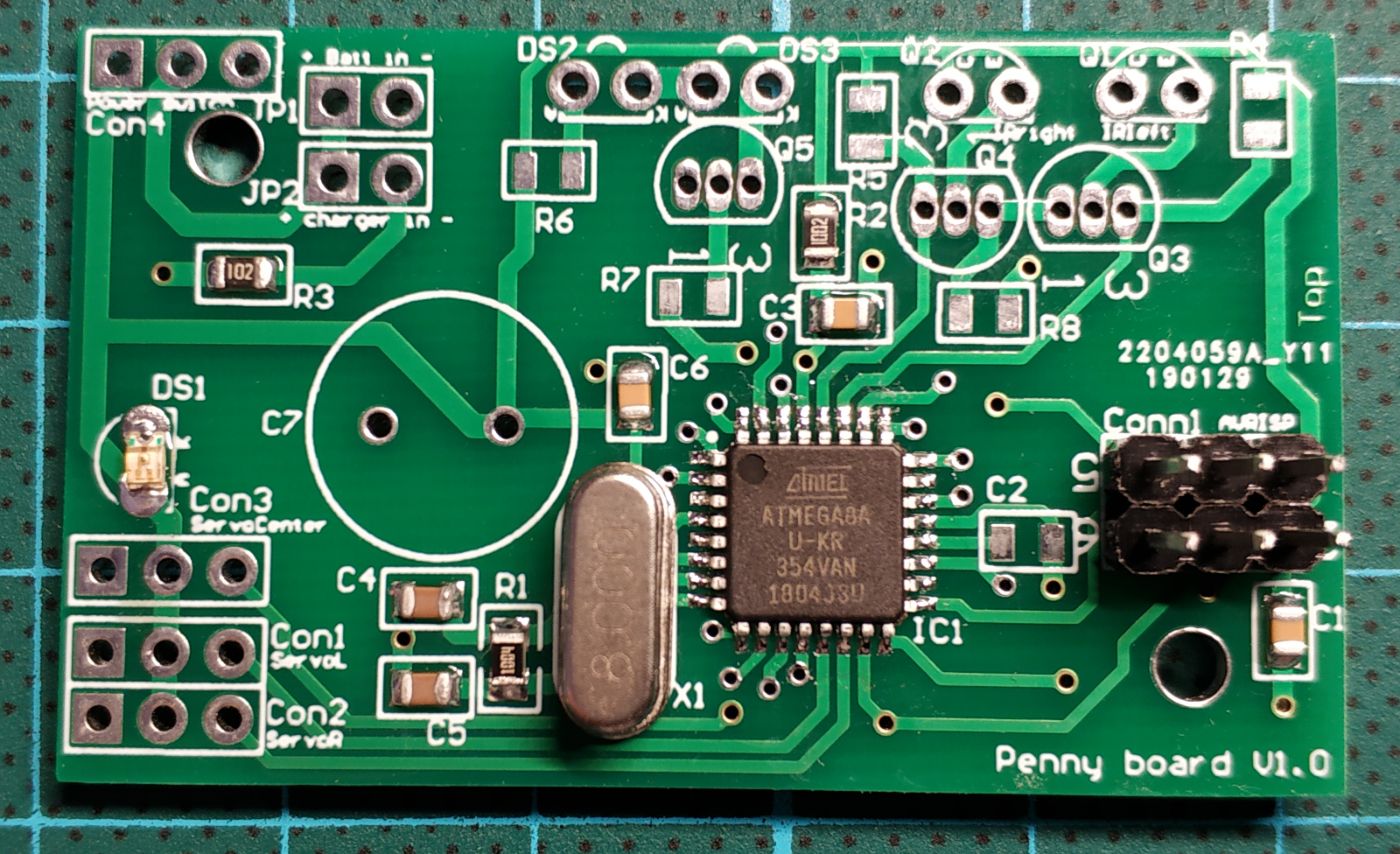
. hardware/motherboard/. :
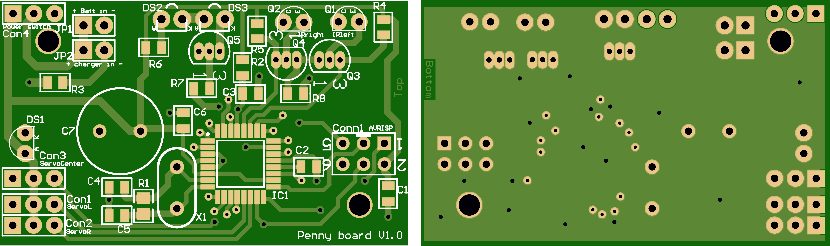
ATMega8 , . :
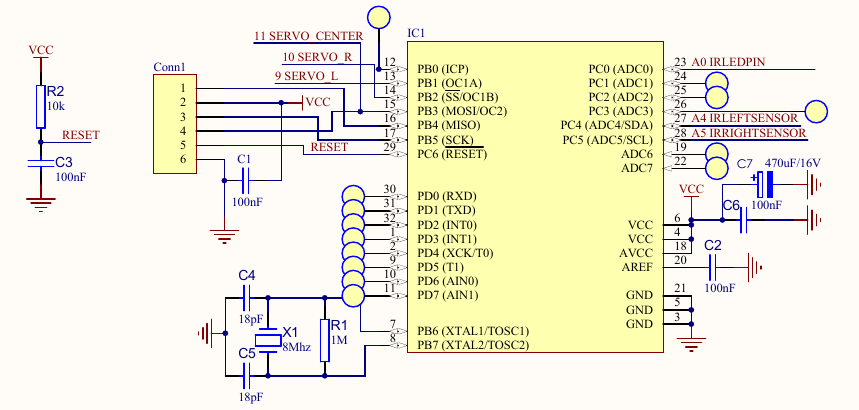
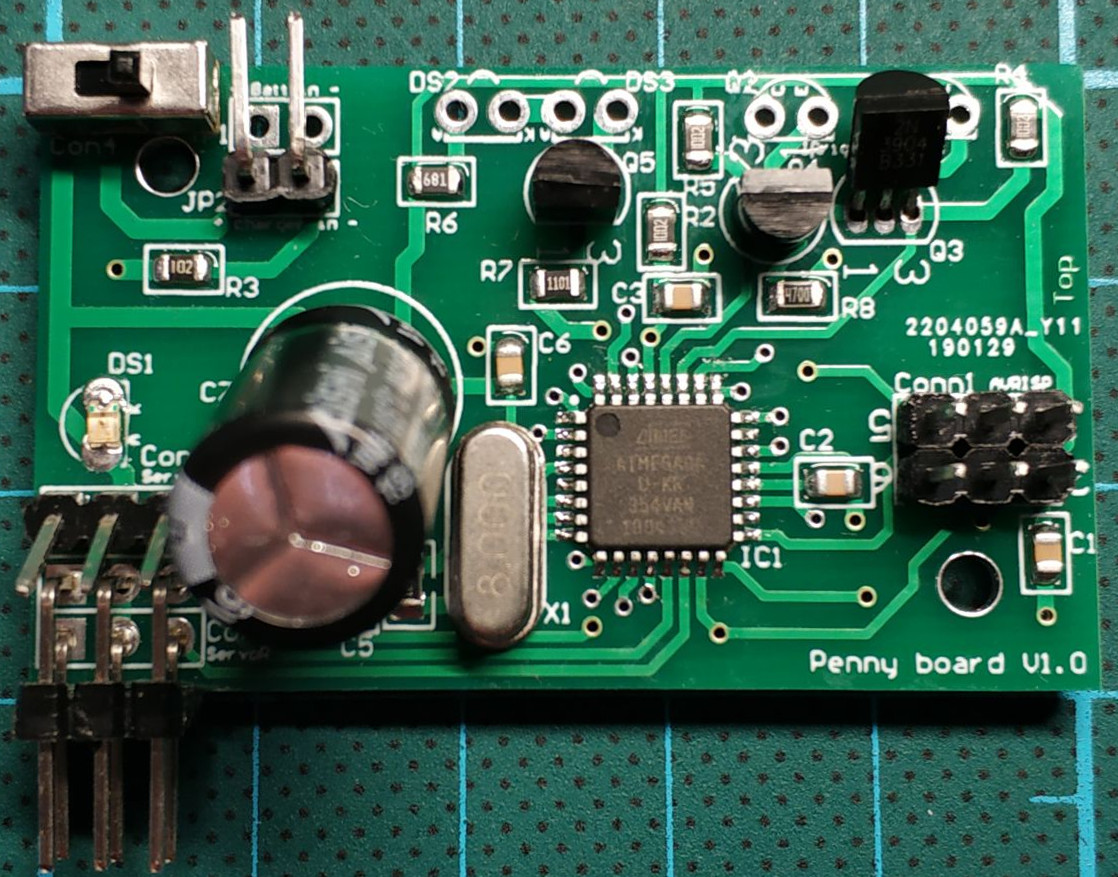
, , , . :
N.B. , ATMega8A 2.7-5.5, 6. — NiMH 1.2V . (6.4 ), , . , , !
( ):
, . ; . , , . , , , :
:
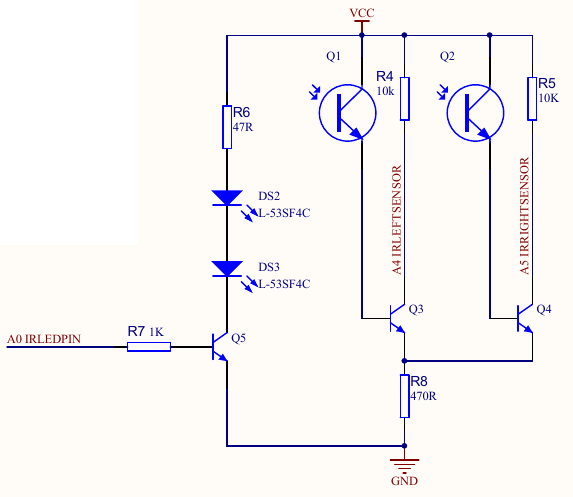
; , Q3 Q4 "" Vcc, , . :
, , , R6. 47 55 , ( ). , , (910 )!
( ). , CR2032, . ( , [] , , )
, , Q3 Q4 . , , , , , .
, . , . 2n3904, , , . , , .
, , , , :
.
, , :
- isf471 2n3904.
- Sharp GP2Y0A21YK0F:

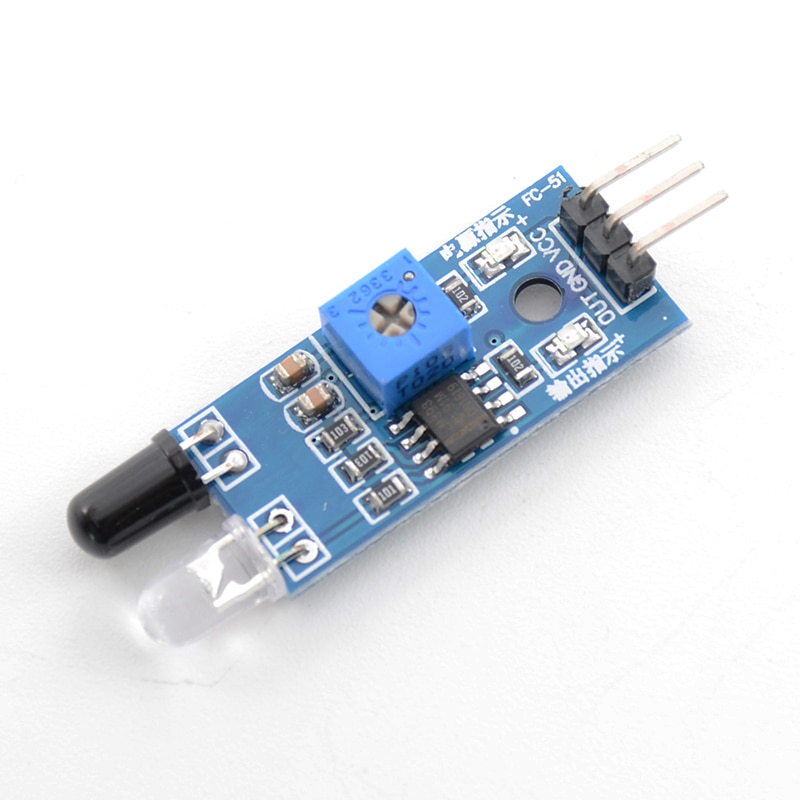
- LM393:
, , , ATMega8. :
-
50 ; 1 (0 ), 2 (90 ). , 16 (timer1), (timer2). , Servo.h , , fast PWM.
8 , timer1 1 ( 8).
ICR1 TOP (20000), , 20 , 50 . OCR1A OCR1B ( ) .
. timer2, , , ICR1, , . , 50 , , - :
- timer2 128, , 4.096 ms = 256 * 128/(8 * 10^6).
- timer2, , .
- capture interrupt timer1 timer2 ( ).
4 2 , , 20 . , (1.5 ), :
OCR1A = 1500;
OCR1B = 1500;
OCR2 = 1500/16;
-, :
const uint8_t zero[3] = {45, 50, 40};
const uint8_t range[3] = {25, 25, 20};
zero[3] , (. ). , 45° ( ), 45° , . , range[3] . , i zero[i]-range[i] zero[i]+range[i].
( , 0°-90°) uint8_t pos[3]. update_servo_timers() - . pos[i]=zero[i]+range[i] i=0,1,2.
. pos_beg[3], pos_end[3], time_start[3] duration[3]. , . :
pos[0] pos_beg[0], , ;pos_end[0] (- );time_start[0] (, );- , ,
duration[0] ( ). , (pos_end[0]-pos_beg[0])/duration[0] /.
movement_planner(), pos[] , update_servo_timers(), - pos[].
, , , ( ) . , . , . , :
- 1:
{zero[0]-range[0], zero[1]-range[1], zero[2]+range[2]} - 2:
{zero[0]-range[0], zero[1]-range[1], zero[2]-range[2]} - 3:
{zero[0]+range[0], zero[1]+range[1], zero[2]-range[2]} - 4:
{zero[0]+range[0], zero[1]+range[1], zero[2]+range[2]}
2 ( ):
const int8_t advance_sequence[4][3] = {{-1, -1, 1}, {-1, -1, -1}, { 1, 1, -1}, { 1, 1, 1}};
, i step zero[i] + range[i]*advance_sequence[step][i].
:
uint8_t step = steps_per_sequence-1;
while (1) {
if (is_movement_finished()) {
step = (step + 1) % 4;
plan_next_movement(step, advance_sequence);
}
movement_planner();
_delay_ms(1);
}
, , 4 5 . , ( , ), adc_left_eye adc_right_eye , :
adc_left_eye = adc_left_eye *.99 + adc_read(5)*.01;
adc_right_eye = adc_right_eye*.99 + adc_read(4)*.01;
_delay_ms() , .99 1-.99 .
:
uint8_t lobst = adc_left_eye < distance_threshold;
uint8_t robst = adc_right_eye < distance_threshold;
(, ) :
if (is_movement_finished()) {
if (!lobst && !robst) {
sequence = advance_sequence;
} else if (lobst && robst) {
sequence = retreat_sequence;
} else if (lobst && !robst) {
sequence = turn_right_sequence;
} else if (!lobst && robst) {
sequence = turn_left_sequence;
}
step = (step + 1) % steps_per_sequence;
plan_next_movement(step, sequence);
}
, !
! , , :
:
- "", . , , . , ?
- ( !) , , .
- , , avr-gcc . , - .
:
, V2 , ! , // :
- — , ;
- , RC- ;
- ;
- R6 ;
- ( ) ;
- — . — , ;
- इलेक्ट्रोलाइट को थोड़ा हिलाएं। मुझे इसे झुकाना पड़ा, क्योंकि अन्यथा, केंद्रीय बाएं पैर में दर्द होता है;
- एक आस्टसीलस्कप के साथ उन तक आसान पहुंच के साथ परीक्षण साइटें जोड़ें;
- एक आस्टसीलस्कप के बिना डिबगिंग के लिए डिबग एल ई डी की एक जोड़ी जोड़ें;
- डीबगिंग और रोबोट के आगे विस्तार के लिए सभी अप्रयुक्त माइक्रोप्रोसेसर पैरों के लिए सोल्डरिंग पैड जोड़ें।
निष्कर्ष
पेट्या भयानक मज़ा है!
