आज छवि में वस्तुओं का पता लगाने का कार्य मशीन दृष्टि के क्षेत्र में अग्रणी है। इसका सार न केवल चित्र में ऑब्जेक्ट को वर्गीकृत करना है, बल्कि इसके सटीक स्थान को इंगित करना भी है।ऑब्जेक्ट डिटेक्शन के परिणामों को इस ऑब्जेक्ट की जानकारी के साथ पूरक किया जा सकता है कि यह ऑब्जेक्ट कितनी दूर स्थित है। दूरी माप की समस्या को इंटेल RealSense D435 गहराई कैमरा का उपयोग करके हल किया जा सकता है , जो प्रत्येक बिंदु पर गहराई को मापता है।इस लेख में, हम OpenCV लाइब्रेरी और RealSense तकनीक का उपयोग करके वास्तविक समय में किसी वस्तु से दूरी को मापने की समस्या को हल करेंगे ।
आवश्यकताएँ
RealSense कैमरादूरी को मापने के लिए, हमें एक RealSense D435 गहराई कैमरा की आवश्यकता है । इस उदाहरण के लिए, RealSense SDK को स्थापित करने की कोई आवश्यकता नहीं है।Pyrealsense2 लाइब्रेरीसभी कोड, प्रदर्शन में आसानी के लिए, हम Python 3.7 में लिखेंगे , इसलिए हमें pyrealsense2 पैकेज की आवश्यकता है ।pip install pyrealsense2
OpenCV लाइब्रेरीइसके अलावा, हमें OpenCV लाइब्रेरी की आवश्यकता है (3.4 से शुरू होने वाला कोई भी संस्करण उपयुक्त है)। लाइब्रेरी इंस्टॉलेशन मैनुअल को आधिकारिक OpenCV वेबसाइट पर देखा जा सकता है । OpenCV केसाथ , एक और आवश्यक पुस्तकालय स्थापित किया जाएगा - सुन्न ।ऑब्जेक्ट डिटेक्शन
पहला कदम वीडियो में वस्तुओं का चयन करना है। वास्तविक समय में वस्तुओं का पता लगाने के लिए, तथाकथित एक-चरण मॉडल (उदाहरण के लिए, रेटिना नेट, एसएसडी, योलो ), जो ऑपरेशन की गति में जीतते हैं, एकदम सही हैं ।प्रयोग की सरलता के लिए, हम प्रशिक्षित मॉडल SSDLite Mobilenet v2 लेंगे । इसके बजाय, किसी अन्य मॉडल का उपयोग किया जा सकता है जो ऑब्जेक्ट के निर्देशांक को एक या दूसरे रूप में लौटाता है।आप आधिकारिक TensorFlow रिपॉजिटरी में मॉडल फ़ाइलों के साथ संग्रह डाउनलोड कर सकते हैं ।संग्रह में द्विआधारी .pb प्रारूप में एक जमे हुए गणना ग्राफ शामिल है, साथ ही साथ विभिन्न विन्यास। लेकिन OpenCV में मॉडल का उपयोग करने के लिए, आप भी पाठ स्वरूप में गणना की एक ग्राफ होना आवश्यक है .pbtxt । यह संग्रह में नहीं है, इसलिए इसे मैन्युअल रूप से उत्पन्न किया जाना चाहिए। OpenCVरिपॉजिटरी से दो स्क्रिप्ट कॉपी करें :- github.com/opencv/opencv/blob/master/samples/dnn/tf_text_graph_ssd.py
- github.com/opencv/opencv/blob/master/samples/dnn/tf_text_graph_common.py
फिर, निम्नलिखित कमांड निष्पादित करें, आवश्यक पथ निर्दिष्ट करें:python tf_text_graph_ssd.py --input /path/to/model.pb --config /path/to/example.config --output /path/to/graph.pbtxt
आउटपुट एक graph.pbtxt फ़ाइल है ।हमने प्रोजेक्ट फ़ोल्डर में मौजूदा मॉडल फ़ाइलों को रखा। मेरे मामले में, यह मॉडल / फ़ोल्डर है ।विकास
अब सब कुछ विकास के लिए तैयार है। कोड लिखना शुरू करते हैं।हम आवश्यक पुस्तकालयों को आयात करते हैं और draw_predictions () विधि पर एक स्टब बनाते हैं , जिसकी हमें बाद में आवश्यकता होगी:import pyrealsense2 as rs
import numpy as np
import cv2 as cv
def draw_predictions(pred_img, color_img, depth_image):
pass
मुख्य वस्तुएं बनाएं:pipeline = rs.pipeline()
config = rs.config()
colorizer = rs.colorizer()
spatial = rs.spatial_filter()
spatial.set_option(rs.option.holes_fill, 3)
हम ssd मॉडल को इनिशियलाइज़ करते हैं । यहाँ, .pbtxt फ़ाइल जो हमने ऊपर उत्पन्न की है वह हमारे लिए उपयोगी है :
model = cv.dnn.readNetFromTensorflow(
"models/ssdlite_mobilenet_v2_coco_2018_05_09/frozen_inference_graph.pb",
"models/ssdlite_mobilenet_v2_coco_2018_05_09/graph.pbtxt"
)
हम कैमरा स्ट्रीम शुरू करते हैं:
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
profile = pipeline.start(config)
ध्यान दें कि हम BGR प्रारूप में रंग धारा को कैप्चर करते हैं , क्योंकि यह वह प्रारूप है जो डिफ़ॉल्ट रूप से OpenCV का उपयोग करता है ।हम एक चक्र शुरू करते हैं जिसमें हम क्रमिक रूप से कब्जा करेंगे और फ्रेम को संसाधित करेंगे:cv.namedWindow("RealSense object detection", cv.WINDOW_AUTOSIZE)
try:
while True:
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
if not depth_frame or not color_frame:
continue
फ्रेम के आगे के प्रसंस्करण के लिए, हम उन्हें अफीम सरणियों के रूप में दर्शाते हैं:
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
हम पता लगाने के लिए ssd मॉडल का उपयोग करते हैं :
model.setInput(cv.dnn.blobFromImage(color_image, size=(300, 300), swapRB=True, crop=False))
pred = model.forward()
draw_predictions(pred, color_image, depth_image)
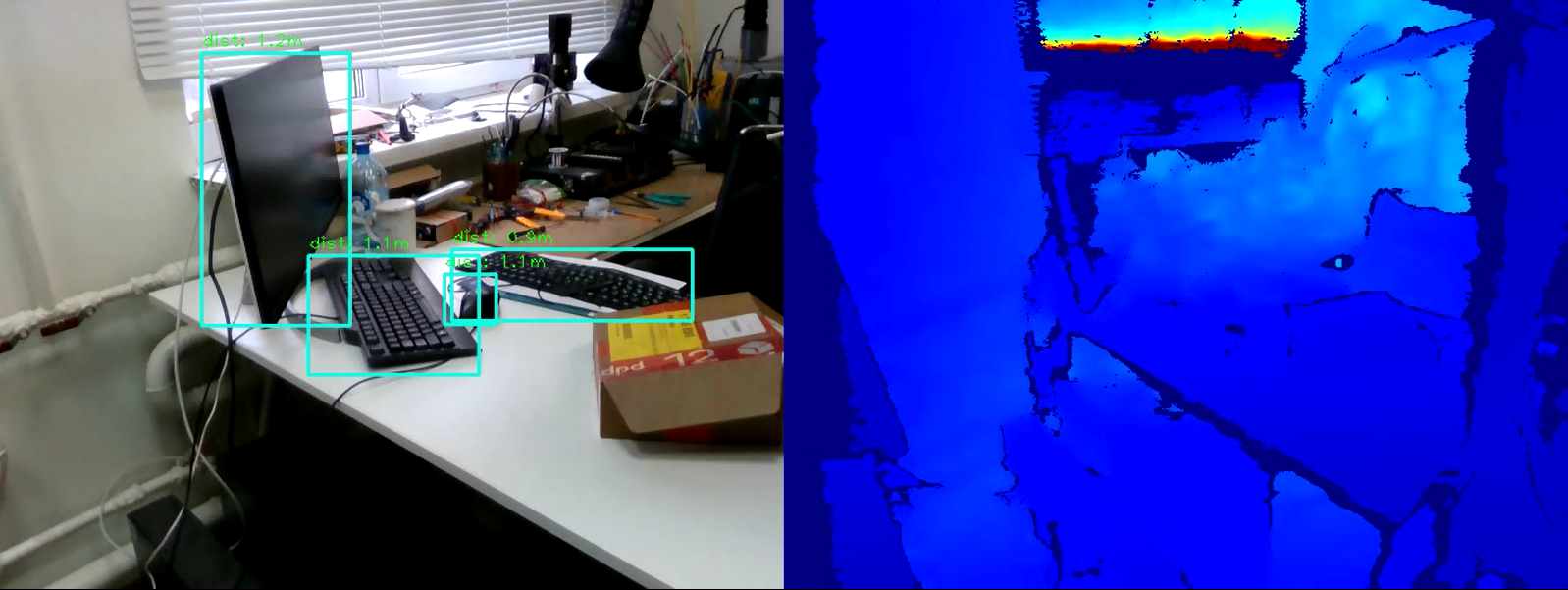
हम खिड़की में परिणाम आकर्षित करते हैं:
colorized_depth = cv.applyColorMap(cv.convertScaleAbs(depth_image, alpha=0.03), cv.COLORMAP_JET)
images = np.hstack((color_image, colorized_depth))
cv.imshow("RealSense object detection", images)
हम लूप से बाहर निकलने की स्थिति लिखते हैं:
key = cv.waitKey(1) & 0xFF
if (key == 27) or (key == ord('q')):
cv.destroyWindow("RealSense object detection")
break
स्ट्रीम बंद करें:finally:
pipeline.stop()
और आखिर का। हम draw_predictions () रेंडरिंग विधि को भरते हैं जो हमने बहुत शुरुआत में बनाया था। इसमें, हम वस्तुओं के लिए दूरी पर विचार करेंगे। मैंने दूरी की गणना इस प्रकार करने का निर्णय लिया: पाया वस्तु के फ्रेम में सभी दूरी बिंदुओं का औसत लें:def draw_predictions(pred_img, color_img, depth_image):
for detection in pred_img[0,0,:,:]:
score = float(detection[2])
if score > 0.5:
left = detection[3] * color_img.shape[1]
top = detection[4] * color_img.shape[0]
right = detection[5] * color_img.shape[1]
bottom = detection[6] * color_img.shape[0]
cv.rectangle(color_img, (int(left), int(top)), (int(right), int(bottom)), (210, 230, 23), 2)
depth = depth_image[int(left):int(right), int(top):int(bottom)].astype(float)
depth_scale = profile.get_device().first_depth_sensor().get_depth_scale()
depth = depth * depth_scale
dist,_,_,_ = cv.mean(depth)
dist = round(dist, 1)
cv.putText(color_img, "dist: "+str(dist)+"m", (int(left), int(top)-5), cv.FONT_HERSHEY_PLAIN, 1, (0, 255, 0), 1)
पूर्ण कोडimport pyrealsense2 as rs
import numpy as np
import cv2 as cv
def draw_predictions(pred_img, color_img, depth_image):
for detection in pred_img[0,0,:,:]:
score = float(detection[2])
if score > 0.5:
left = detection[3] * color_img.shape[1]
top = detection[4] * color_img.shape[0]
right = detection[5] * color_img.shape[1]
bottom = detection[6] * color_img.shape[0]
cv.rectangle(color_img, (int(left), int(top)), (int(right), int(bottom)), (210, 230, 23), 2)
depth = depth_image[int(left):int(right), int(top):int(bottom)].astype(float)
depth_scale = profile.get_device().first_depth_sensor().get_depth_scale()
depth = depth * depth_scale
dist,_,_,_ = cv.mean(depth)
dist = round(dist, 1)
cv.putText(color_img, "dist: "+str(dist)+"m", (int(left), int(top)-5), cv.FONT_HERSHEY_PLAIN, 1, (0, 255, 0), 1)
pipeline = rs.pipeline()
config = rs.config()
colorizer = rs.colorizer()
model = cv.dnn.readNetFromTensorflow(
"models/ssdlite_mobilenet_v2_coco_2018_05_09/frozen_inference_graph.pb",
"models/ssdlite_mobilenet_v2_coco_2018_05_09/graph.pbtxt"
)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
profile = pipeline.start(config)
cv.namedWindow("RealSense object detection", cv.WINDOW_AUTOSIZE)
try:
while True:
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
if not depth_frame or not color_frame:
continue
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
model.setInput(cv.dnn.blobFromImage(color_image, size=(300, 300), swapRB=True, crop=False))
pred = model.forward()
draw_predictions(pred, color_image, depth_image)
colorized_depth = cv.applyColorMap(cv.convertScaleAbs(depth_image, alpha=0.03), cv.COLORMAP_JET)
images = np.hstack((color_image, colorized_depth))
cv.imshow("RealSense object detection", images)
key = cv.waitKey(1) & 0xFF
if (key == 27) or (key == ord('q')):
cv.destroyWindow("RealSense object detection")
break
finally:
pipeline.stop()
निष्कर्ष
इस प्रकार, हमारे पास चयनित ऑब्जेक्ट से दूरी का अनुमान लगाने के लिए एक सरल स्क्रिप्ट है। एल्गोरिथ्म लगभग 50 सेमी की गलती कर सकता है, लेकिन कुल मिलाकर चार मीटर के भीतर अच्छी तरह से काम करता है। माप की सटीकता बढ़ाने के लिए, आप pyrealsense2 में एम्बेडेड अतिरिक्त फ़िल्टर को छवि की गुणवत्ता बढ़ाने के लिए गहराई के नक्शे पर लागू कर सकते हैं , या स्वयं गहराई गणना एल्गोरिदम को संशोधित कर सकते हैं (उदाहरण के लिए, एक भारित औसत की गणना करें या एक केंद्रीय क्षेत्र में दूरी को मापें)। जैसा कि आप देख सकते हैं, कार्य मुश्किल नहीं है, लेकिन दिलचस्प है।