 polargraph.co.ukIls disent que les Russes exploitent depuis longtemps, mais vont vite. L'idée de rassembler un demi-paragraphe m'est venue il y a 5 ans après avoir lu un article sur un lecteur sur des lecteurs de disquette . J'ai d'abord trouvé un drawbot sur disquette, puis un demi-paragraphe. Ne demandez pas quelle est la relation entre cela, ce n'est pas le cas. Surtout utilisé le manuel avec des instructables .
polargraph.co.ukIls disent que les Russes exploitent depuis longtemps, mais vont vite. L'idée de rassembler un demi-paragraphe m'est venue il y a 5 ans après avoir lu un article sur un lecteur sur des lecteurs de disquette . J'ai d'abord trouvé un drawbot sur disquette, puis un demi-paragraphe. Ne demandez pas quelle est la relation entre cela, ce n'est pas le cas. Surtout utilisé le manuel avec des instructables .Accessoires
- Arduino uno
- Pilote de moteur Motorshield d'AdaFruit. J'avais un Motor Drive Shield L293D pour Arduino / Wze.
- 2 moteurs pas à pas NEMA-17. J'ai utilisé le moteur pas à pas hybride 42BYGH202 / Wze.

- Alimentation AC / DC
- Gondole. Je l'ai fait à partir d'un support de disque, j'ai besoin de faire deux trous pour fixer les cordons et le troisième pour la charge.

instructables.com - Châssis de canettes de la machine à coudre (il y a un espace entre la canette et l'axe du moteur, j'ai mis un morceau de caoutchouc). Mieux vaut utiliser une ligne de pêche plutôt qu'un fil.
- La surface sur laquelle les moteurs sont montés. Le plus gros le meilleur. L'auteur avec des supports de moteur utilisables (supports), je viens de les attacher au carton que j'ai collé sur la tablette A2.
Arduino
Installez la dernière version de l' IDE Arduino (l'ancienne ne peut pas charger le code). Définissez le chemin d'accès au dossier avec les esquisses (/ sketches /): Fichier -> Paramètres -> Emplacement du dossier d'esquisse.Téléchargez le code depuis le github euphy .Décompressez l'archive. Copiez les bibliothèques Adafruit et AccelStepper dans le dossier / sketches / bibliothèques /, le dossier polargraph_server_a1 dans le dossier / sketches /.Lancez l'IDE Arduino. Fichier -> Dossier avec croquis -> polargraph_server_a1. Nous compilons, téléchargeons sur le forum.Moteurs pas à pas
À propos des moteurs pas à pas, il y a un merveilleux article sur Habr. Par essais et erreurs, je les ai connectés à la carte: le moteur gauche - aux bornes M1, M2, la droite - M3, M4.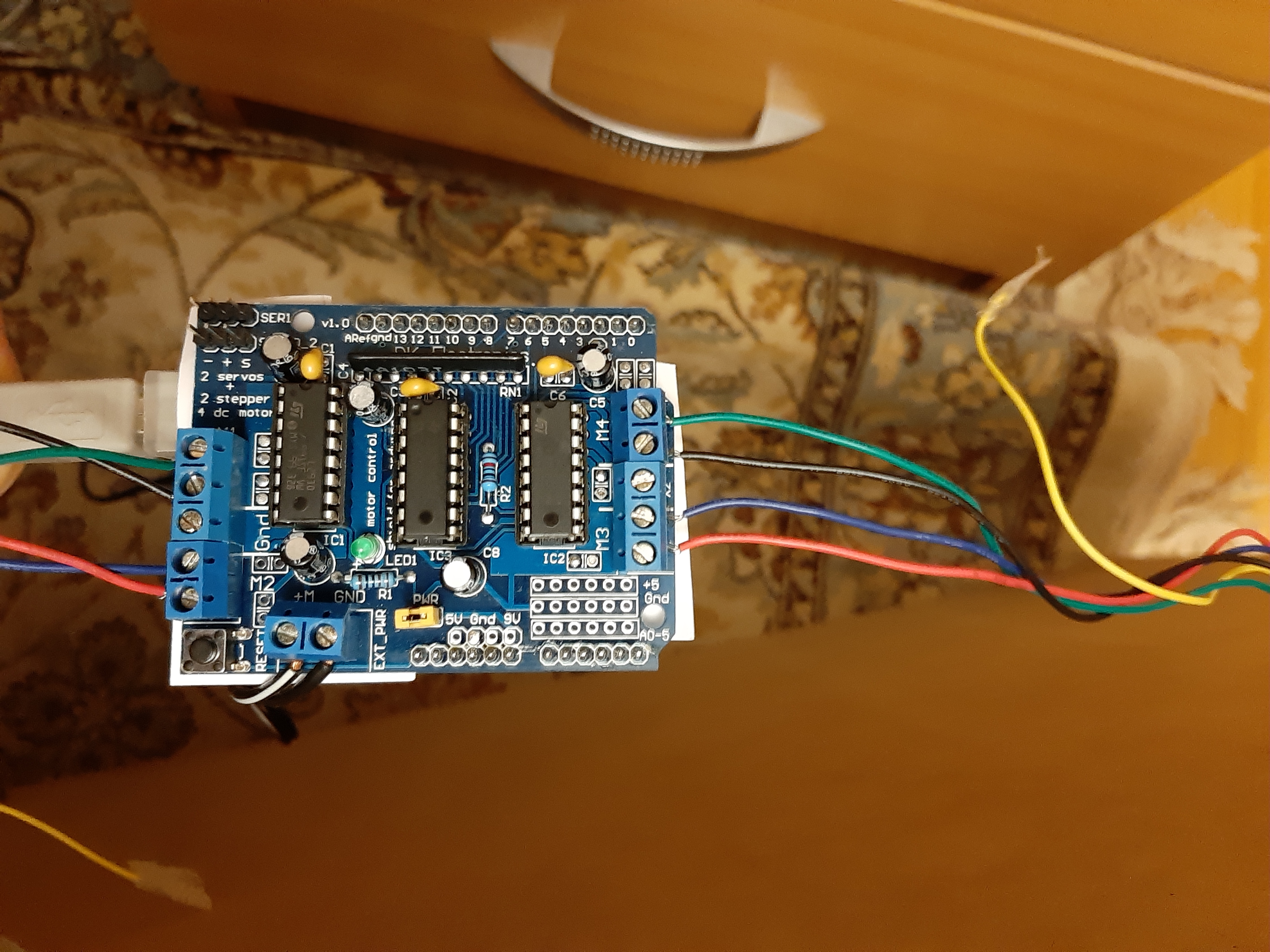
Installation du logiciel
Dans l'archive euphy précédemment téléchargée, décompressez le dossier / controller /.Dans le fichier default.properties.txt , spécifiez les dimensions nécessaires: largeur et longueur de la machine, largeur et longueur de la feuille, point d'origine. Ils doivent être mesurés assez précisément, au millimètre près, sinon il y aura des distorsions dans l'image. Je vais montrer un exemple ci-dessous, cela s'est avéré comme ça.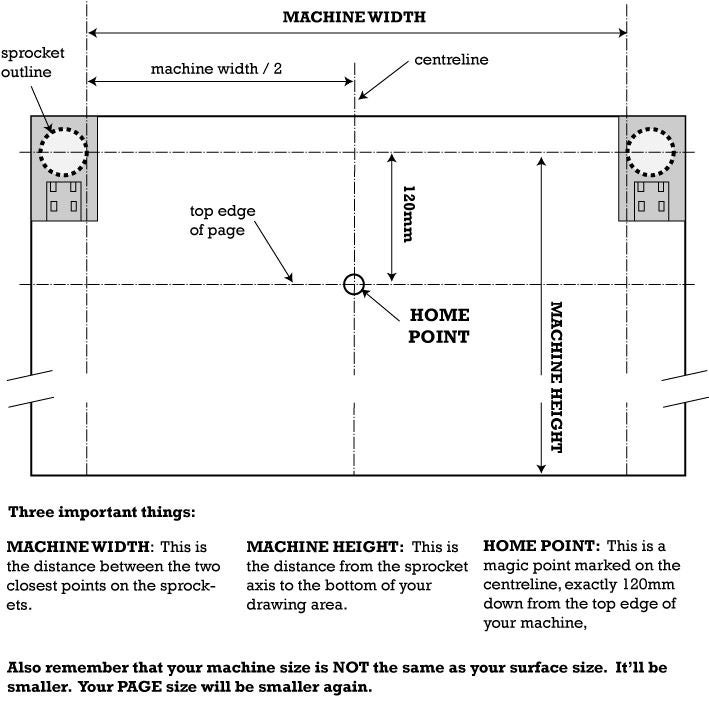 instructables.comLancez l'application:
instructables.comLancez l'application:sudo chmod +x polargraphcontroller
./polargraphcontroller
 Dans l'onglet SETUP, sélectionnez le port souhaité (SERIAL PORT). Une inscription verte devrait apparaître en haut que le poshraf est prêt. Réglez la télécabine sur le point HOME POINT.Dans l'onglet ENTRÉE, sélectionnez CHARGER L'IMAGE. Téléchargez l'image, redimensionnez si nécessaire (REDIMENSIONNER L'IMAGE). Déplacez l'image (MOVE IMAGE) dans la zone de feuille, sélectionnez le fragment souhaité (SELECT AREA), réduisez la GRID SIZE si nécessaire et appuyez sur RENDER PIXELS. Dans la fenêtre contextuelle, vous devez choisir le début du dessin (EN HAUT À DROITE) et du style (ONDE CARRÉE DE TAILLE VARIABLE).
Dans l'onglet SETUP, sélectionnez le port souhaité (SERIAL PORT). Une inscription verte devrait apparaître en haut que le poshraf est prêt. Réglez la télécabine sur le point HOME POINT.Dans l'onglet ENTRÉE, sélectionnez CHARGER L'IMAGE. Téléchargez l'image, redimensionnez si nécessaire (REDIMENSIONNER L'IMAGE). Déplacez l'image (MOVE IMAGE) dans la zone de feuille, sélectionnez le fragment souhaité (SELECT AREA), réduisez la GRID SIZE si nécessaire et appuyez sur RENDER PIXELS. Dans la fenêtre contextuelle, vous devez choisir le début du dessin (EN HAUT À DROITE) et du style (ONDE CARRÉE DE TAILLE VARIABLE). Sur la droite, pour démarrer la file d'attente de commandes, cliquez sur l'inscription rouge (devient verte): ommandQueue: QUEUE RUNNING.Il m'a fallu environ une heure pour dessiner l'inscription. Doodle en haut à droite, car j'ai d'abord choisi le style SCRIBBLE. La compression de l'axe Y est visible en raison de mesures inexactes.
Sur la droite, pour démarrer la file d'attente de commandes, cliquez sur l'inscription rouge (devient verte): ommandQueue: QUEUE RUNNING.Il m'a fallu environ une heure pour dessiner l'inscription. Doodle en haut à droite, car j'ai d'abord choisi le style SCRIBBLE. La compression de l'axe Y est visible en raison de mesures inexactes. La vitesse du demi-paragraphe.
La vitesse du demi-paragraphe.