
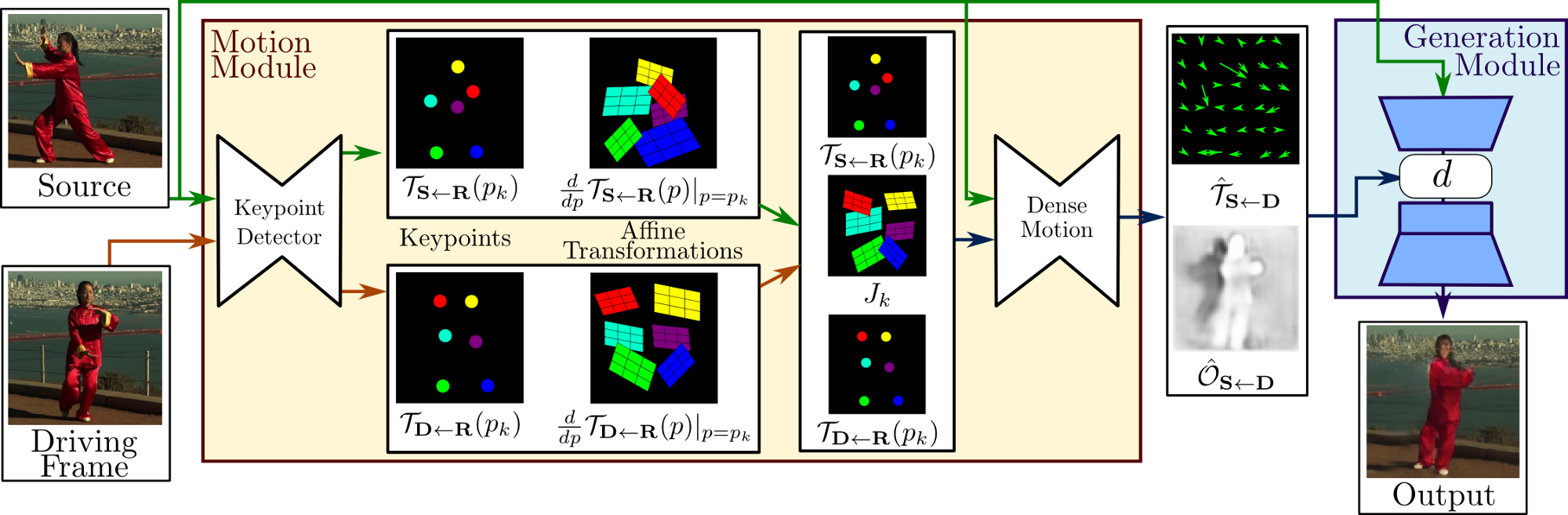
Exemple de travail du modèle de mouvement du premier ordre
Est-il possible de réaliser un film entier à partir d'une seule photo? Et après avoir enregistré les mouvements d'une personne, la remplacer par une autre dans la vidéo? Bien sûr, la réponse à ces questions est extrêmement importante pour des domaines tels que le cinéma, la photographie et le développement de jeux informatiques. La solution pourrait être un traitement photo numérique utilisant un logiciel spécialisé. Le problème en question chez les spécialistes de ce domaine est appelé la tâche de synthèse automatique de l'animation vidéo ou image.
Pour obtenir le résultat escompté, les approches existantes combinent des objets extraits de l'image d'origine et des mouvements qui peuvent être livrés sous forme de vidéo distincte - «donneur».
Maintenant, dans la plupart des domaines, l'animation d'image se fait à l'aide d'outils graphiques informatiques. Cette approche nécessite des connaissances supplémentaires sur l'objet que nous voulons animer - son modèle 3D est généralement nécessaire (comment il fonctionne maintenant dans l'industrie cinématographique peut être trouvé ici ). La plupart des dernières solutions à ce problème sont basées sur une formation approfondie des modèles, qui sont basés sur des réseaux neuronaux compétitifs génératifs (GAN) et des autoencodeurs variationnels (VAE). Ces modèles utilisent généralement des modules pré-formés pour rechercher des points clés d'objets dans l'image. Le principal problème de cette approche est que ces modules ne peuvent reconnaître que les objets sur lesquels ils ont été formés.
, ? «First Order Motion Model for Image Animation». — First Order Motion Model, . , (, , ), , .
…
, .
, , (occlusion map). . , , .
: .
. .
. , ( ) . . .
.
. . , ( ), . , , . , .
:

, , .
:
. U-Net, , .
softmax , .
( ), . , , , , . , (), . U-Net.
:

— ( — ) :

, . , . down-sampling . c . , . — , , , . :
, — ( ).
, . , .
, . reconstruction loss, . - VGG-19. reconstruction loss :
— , — , — i- , VGG-19, — .
- . . , . , . , , , .
, , , thin plane spline. . ,
. C :
( — ):

. , reconstruction loss 2 .
, . . , :

, — .
!
4 :
- VoxCeleb — 22496 , YouTube;
- UvA-Nemo — , 1240 ;
- BAIR robot pushing — , , , . 42880 128 .
- 280 TaiChi YouTube.
X2Face Monkey-Net, .

Comme le montre le tableau, le modèle de mouvement du premier ordre est supérieur aux autres approches à tous égards.
Les exemples tant attendus

Mgif

Mode
Essayez-le maintenant! C'est très simple, tout est préparé ici .