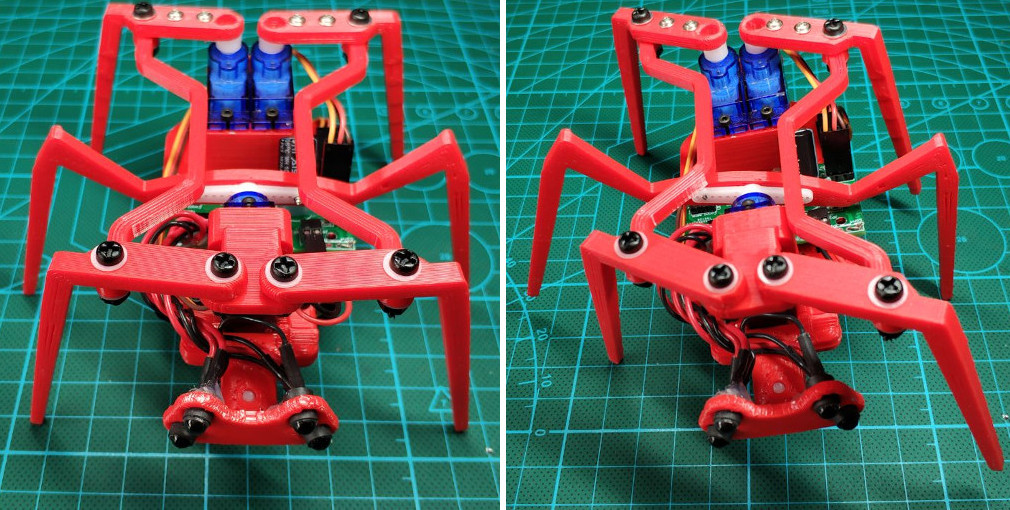
Rencontrez Petya, le servo à trois pattes à six pattes
Je continue de publier des articles de la série Arduino Brain. Petya est un hexapode très bon marché (une dizaine de dollars). Ce peut être un merveilleux projet pour un jour de congé pluvieux, qui divertira les adultes et les enfants. Puisque nous parlons de divertissement, voici une vidéo avec Petya dansant sur de la musique funk:
Bien sûr, je n'ai fait aucune analyse sonore, j'ai simplement programmé Petya pour danser à un certain rythme. Voici une autre vidéo dans laquelle Petya montre son mépris pour jongler avec des balles:
Dans sa forme actuelle, Petya ne peut que marcher, mais en même temps, il peut voir (mesurer la distance) des obstacles à proximité. Son cerveau, cependant, est suffisamment productif pour pouvoir digérer les données de nombreux autres capteurs, envoyez vos suggestions!
Comment cloner Petya
Liste de courses
3 , / . , :
- . , . - 10€ / 10 ( ), 2€ / 10 . , , . — , cheapduino - , .
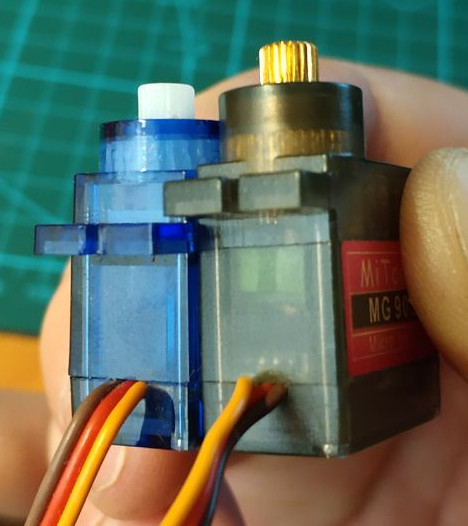
- SG90 9G , 3 * 1.47€ /
- 4x AAA , 1.34€ /
- ATMega8A-AU (QFP-32), 1€ /
- IR LED + IR , 0.20€ /
- 1000uF 16V, 0.17€ /
- 2n3904 , 3 * 0.01€ /
- , , , 0805 . : hardware/motherboard/BOM.html.
, , . (, ), . . — . , ;)
NB: 9g , . . , , , SketchUp . , , , .
, 3 , hardware/body/. - ::
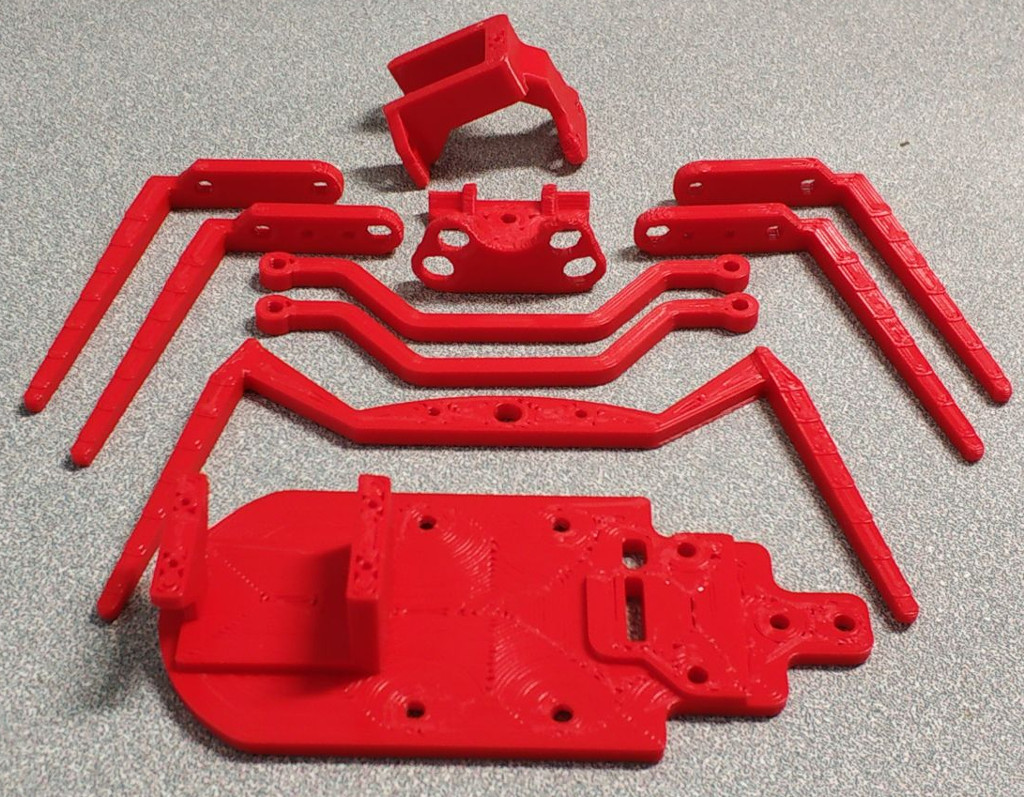
1, . - :

3 . , . :
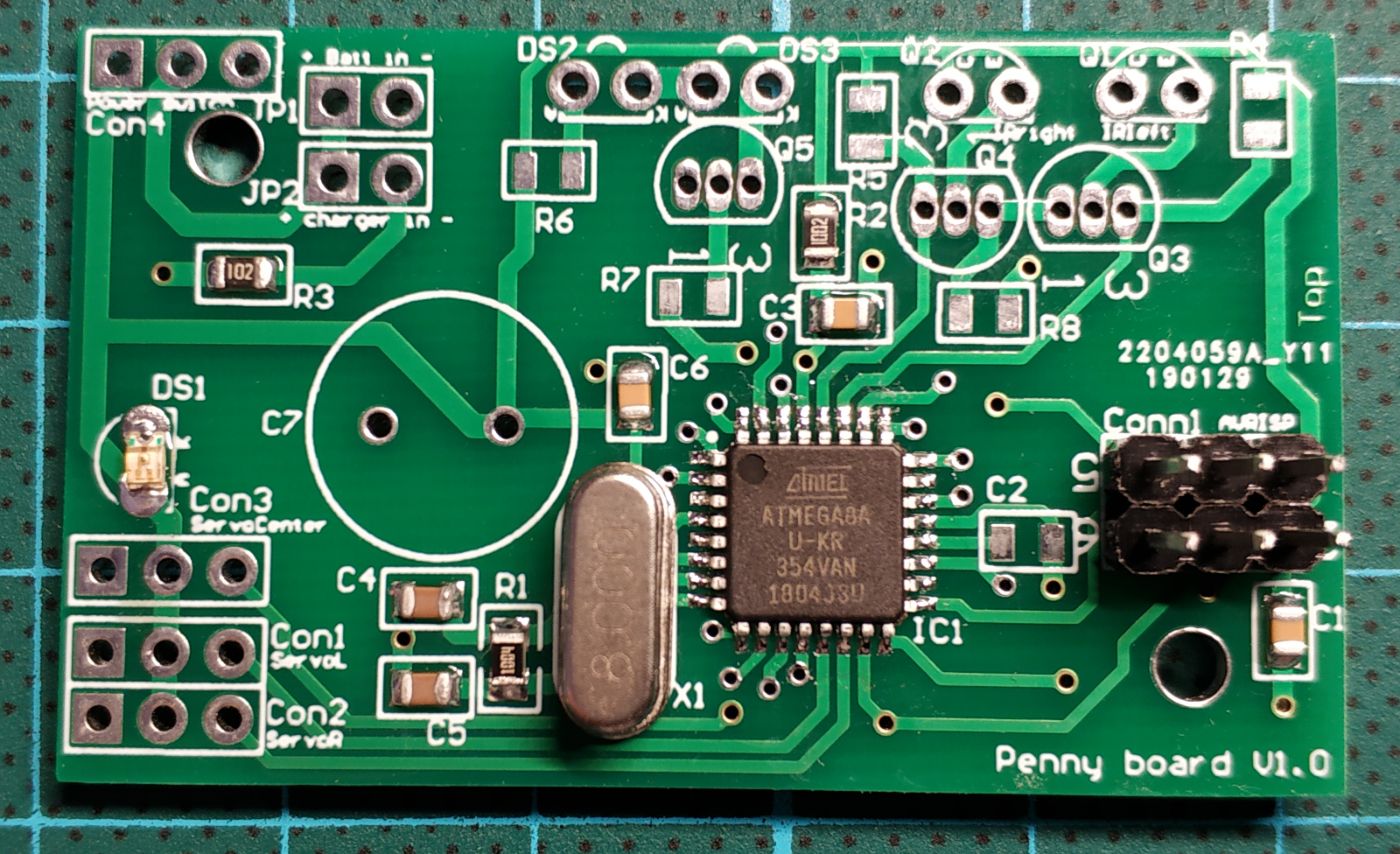
. hardware/motherboard/. :
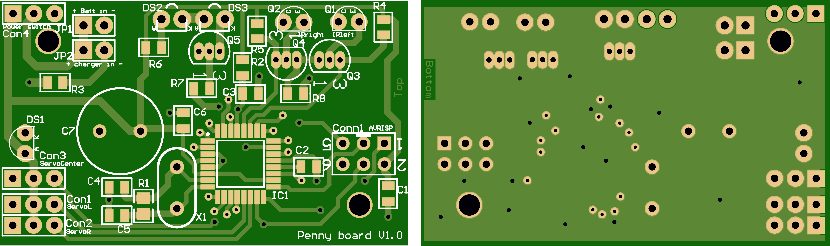
ATMega8 , . :
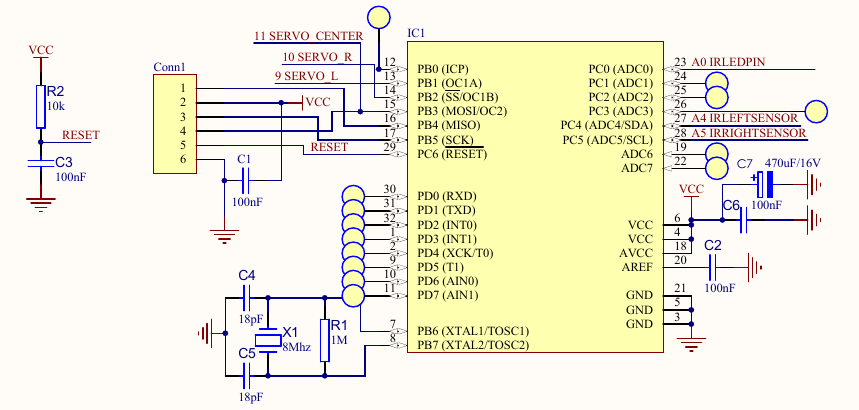
, , , . :
N.B. , ATMega8A 2.7-5.5, 6. — NiMH 1.2V . (6.4 ), , . , , !
( ):
, . ; . , , . , , , :
:
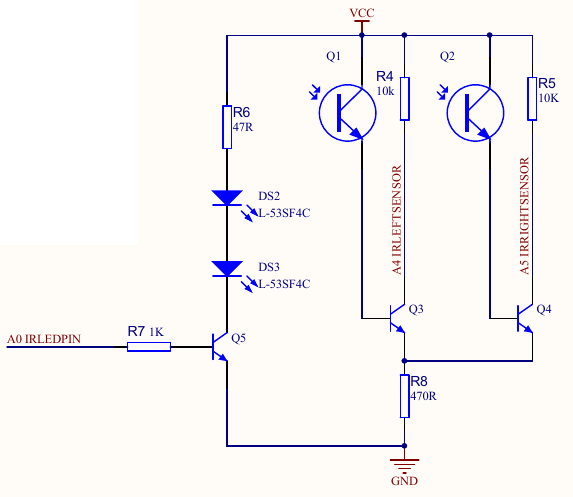
; , Q3 Q4 "" Vcc, , . :
, , , R6. 47 55 , ( ). , , (910 )!
( ). , CR2032, . ( , [] , , )
, , Q3 Q4 . , , , , , .
, . , . 2n3904, , , . , , .
, , , , :
.
, , :
- isf471 2n3904.
- Sharp GP2Y0A21YK0F:

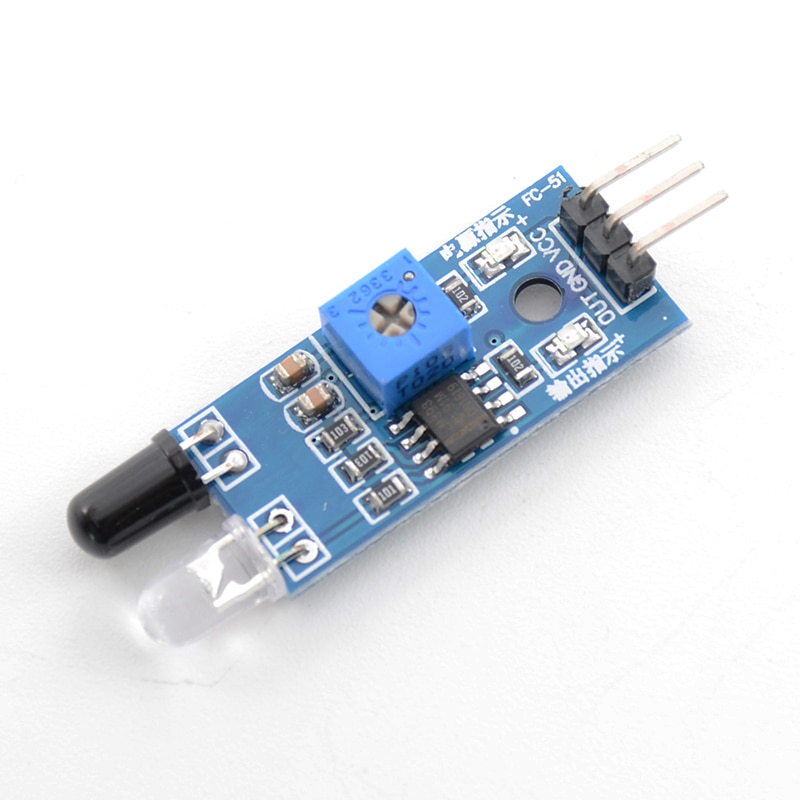
- LM393:
, , , ATMega8. :
-
50 ; 1 (0 ), 2 (90 ). , 16 (timer1), (timer2). , Servo.h , , fast PWM.
8 , timer1 1 ( 8).
ICR1 TOP (20000), , 20 , 50 . OCR1A OCR1B ( ) .
. timer2, , , ICR1, , . , 50 , , - :
- timer2 128, , 4.096 ms = 256 * 128/(8 * 10^6).
- timer2, , .
- capture interrupt timer1 timer2 ( ).
4 2 , , 20 . , (1.5 ), :
OCR1A = 1500;
OCR1B = 1500;
OCR2 = 1500/16;
-, :
const uint8_t zero[3] = {45, 50, 40};
const uint8_t range[3] = {25, 25, 20};
zero[3] , (. ). , 45° ( ), 45° , . , range[3] . , i zero[i]-range[i] zero[i]+range[i].
( , 0°-90°) uint8_t pos[3]. update_servo_timers() - . pos[i]=zero[i]+range[i] i=0,1,2.
. pos_beg[3], pos_end[3], time_start[3] duration[3]. , . :
pos[0] pos_beg[0], , ;pos_end[0] (- );time_start[0] (, );- , ,
duration[0] ( ). , (pos_end[0]-pos_beg[0])/duration[0] /.
movement_planner(), pos[] , update_servo_timers(), - pos[].
, , , ( ) . , . , . , :
- 1:
{zero[0]-range[0], zero[1]-range[1], zero[2]+range[2]} - 2:
{zero[0]-range[0], zero[1]-range[1], zero[2]-range[2]} - 3:
{zero[0]+range[0], zero[1]+range[1], zero[2]-range[2]} - 4:
{zero[0]+range[0], zero[1]+range[1], zero[2]+range[2]}
2 ( ):
const int8_t advance_sequence[4][3] = {{-1, -1, 1}, {-1, -1, -1}, { 1, 1, -1}, { 1, 1, 1}};
, i step zero[i] + range[i]*advance_sequence[step][i].
:
uint8_t step = steps_per_sequence-1;
while (1) {
if (is_movement_finished()) {
step = (step + 1) % 4;
plan_next_movement(step, advance_sequence);
}
movement_planner();
_delay_ms(1);
}
, , 4 5 . , ( , ), adc_left_eye adc_right_eye , :
adc_left_eye = adc_left_eye *.99 + adc_read(5)*.01;
adc_right_eye = adc_right_eye*.99 + adc_read(4)*.01;
_delay_ms() , .99 1-.99 .
:
uint8_t lobst = adc_left_eye < distance_threshold;
uint8_t robst = adc_right_eye < distance_threshold;
(, ) :
if (is_movement_finished()) {
if (!lobst && !robst) {
sequence = advance_sequence;
} else if (lobst && robst) {
sequence = retreat_sequence;
} else if (lobst && !robst) {
sequence = turn_right_sequence;
} else if (!lobst && robst) {
sequence = turn_left_sequence;
}
step = (step + 1) % steps_per_sequence;
plan_next_movement(step, sequence);
}
, !
! , , :
:
- "", . , , . , ?
- ( !) , , .
- , , avr-gcc . , - .
:
, V2 , ! , // :
- — , ;
- , RC- ;
- ;
- R6 ;
- ( ) ;
- — . — , ;
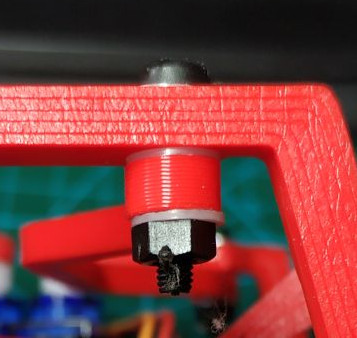
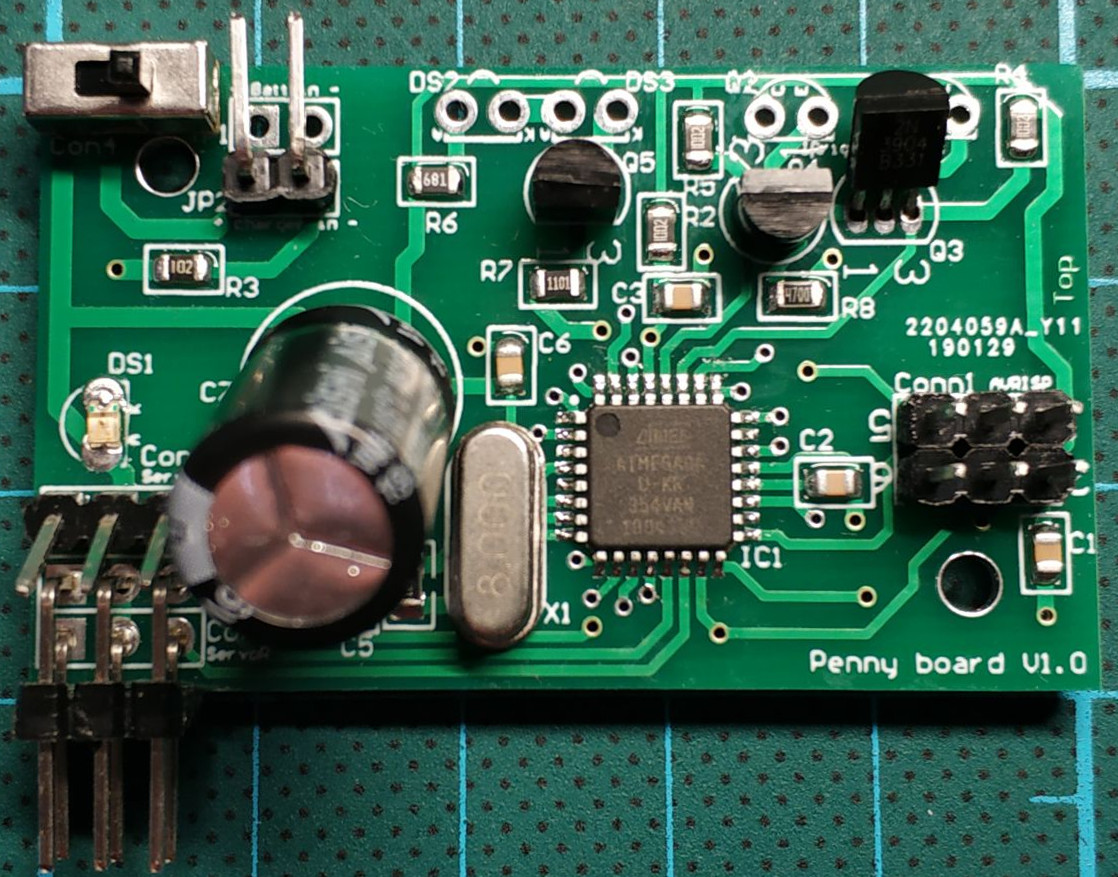
- Déplacez légèrement l'électrolyte. J'ai dû l'incliner, car sinon, la jambe centrale gauche lui fait mal;
- Ajoutez des sites de test avec un accès facile à eux avec un oscilloscope;
- Ajoutez une paire de LED de débogage pour le débogage sans oscilloscope;
- Ajoutez des plots de soudure pour toutes les jambes de microprocesseur inutilisées pour le débogage et l'expansion du robot.
Conclusion
Petya est terriblement amusant!
