ROS: Dédié à ceux qui sont coincés dans Gazebo ... Plate-forme pour un robot pour 28 000 roubles
Instructions de montage pour une plate-forme robotique pour l'étude des ROS avec une capacité de charge supérieure à 30 kg
ROS est un méta-système d'exploitation (open source) pour les robots. C'est devenu un standard de l'industrie. Disposant d'une interface de messagerie prête à l'emploi entre différents nœuds de votre système et d'un grand nombre de solutions toutes faites pour différents composants, il est très facile de construire votre robot.Pour ROS, il existe un environnement de simulateur Gazebo, c'est-à-dire Vous pouvez programmer le robot sans même l'avoir physiquement. La première connaissance de ROS est un plaisir pour la majorité, vous publiez et lisez des sujets, essayez de gérer turtlesim. Et puis il peut y avoir un problème avec la transition vers des robots pleinement opérationnels qui interagissent avec l'environnement. Une partie va plus loin et crée le robot nécessaire dans le simulateur. Beaucoup sont coincés dans un gazebo, je leur dédie ce post.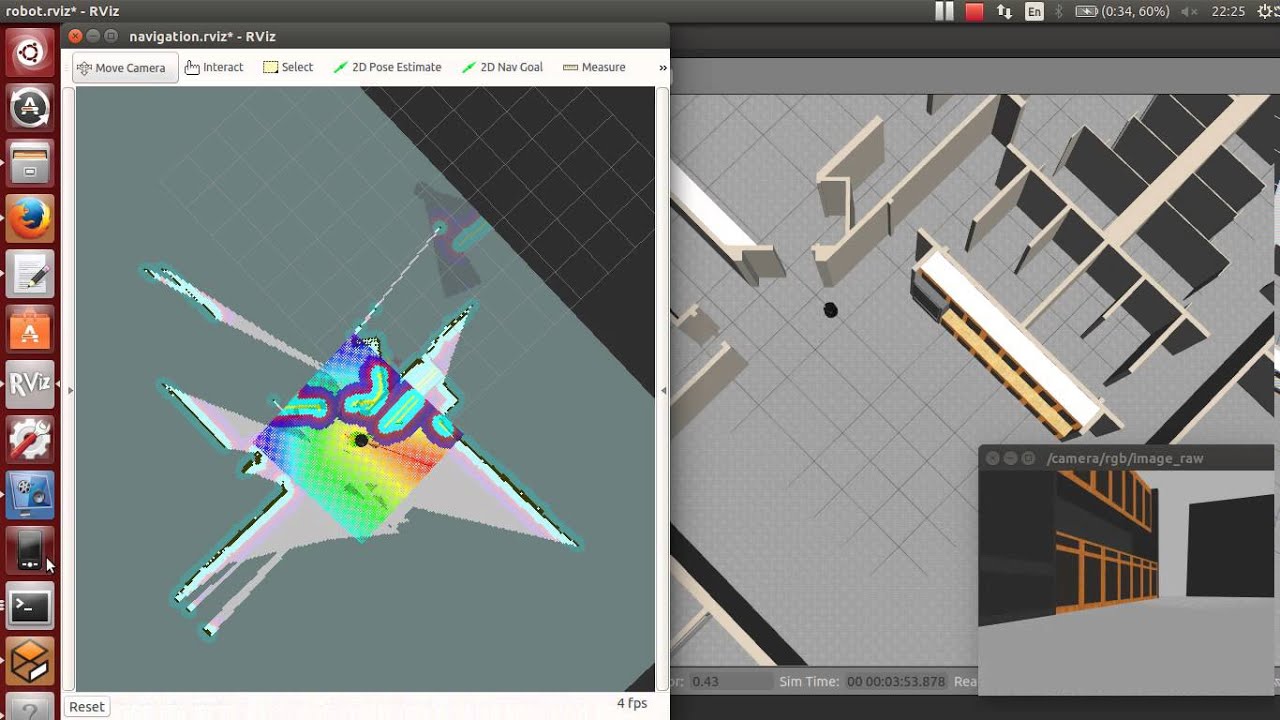 Après avoir publié habr.com sur les robots et la robotique, les clients me contactent avec la nécessité de développer des solutions robotiques. Une tâche intéressante est d'organiser la navigation des robots logistiques avec l'obtention d'objectifs globaux à partir du système de gestion d'entrepôt (WMS) existant. Le client développe lui-même la mécanique du chariot, mais pour travailler en parallèle sur le logiciel, il faut une plateforme capable de simuler le mouvement des marchandises. De plus , pour tester les algorithmes de notre robot dans les conditions d'un hiver rigoureux et pluvieux, nous avions besoin d'une plateforme intérieure. Composé des exigences minimales en matière d'équipement:
Après avoir publié habr.com sur les robots et la robotique, les clients me contactent avec la nécessité de développer des solutions robotiques. Une tâche intéressante est d'organiser la navigation des robots logistiques avec l'obtention d'objectifs globaux à partir du système de gestion d'entrepôt (WMS) existant. Le client développe lui-même la mécanique du chariot, mais pour travailler en parallèle sur le logiciel, il faut une plateforme capable de simuler le mouvement des marchandises. De plus , pour tester les algorithmes de notre robot dans les conditions d'un hiver rigoureux et pluvieux, nous avions besoin d'une plateforme intérieure. Composé des exigences minimales en matière d'équipement:- Plateforme à 2 roues
- Capacité de charge d'au moins 30 kg.
- Lidar RPlidar A1
- Ordinateur monocarte Raspberry Pi
- Arduino Mega Platform
- Sonar
La première pensée a été d'utiliser une plateforme prête à l'emploi. Nous avons apprécié le marché des solutions ROS similaires. TurtleBot3 Burger et le robot sur Neato ne nous convenaient pas, car voulait simuler la livraison de boîtes.Après avoir collecté ces données, une décision ferme a été prise de construire une plateforme. Nous avons mis en place la plate-forme de budget maximum, je publie des instructions de montage, peut-être que cela sera utile pour quelqu'un.Taille du boîtier 320 * 620 * 195 mmLe corps sera fabriqué par fraisage CNC d'un matériau composite. Qui a besoin d'un fichier à découper, écrivez-moi un e-mail, à la fin du post.Lors de la découpe des fentes prévues pour les endroits de pliage Assemblage aux coins.Les roues BLDC 10 ', le conducteur de roue, la batterie et la charge proviennent du gyroscope. Vous pouvez en acheter un nouveau, dans tous les cas, il sera moins cher que les pièces correspondantes séparément.Nous fixons les roues au boîtier à l'aide des pièces imprimées https://www.thingiverse.com/thing:2990353La carte du gyroscope doit être reflasher. J'ai utilisé ce firmwaregithub.com/NiklasFauth/hoverboard-firmware-hack , il existe des variantes. Il existe un compilateur en ligne sur Internet.Comme base de navigation, nous utiliserons l'odométrie des roues et du Rplidar A1.En tant qu'ordinateur, le Raspberry Pi comme solution budgétaire populaire, nous pensons à la version avec jetsoin nano.Étant donné que le lidar nécessite jusqu'à 1 A, le Raspberry Pi jusqu'à 2 A, Arduino a décidé de fournir un séparateur USB avec une alimentation séparée via un convertisseur abaisseur de la batterie principale.


 ROS Master est situé sur un ordinateur séparé, car nous prévoyons d'ajouter une caméra Realsense.La plupart des nœuds s'exécutent sur l'ordinateur maître:
ROS Master est situé sur un ordinateur séparé, car nous prévoyons d'ajouter une caméra Realsense.La plupart des nœuds s'exécutent sur l'ordinateur maître:- nœud pour obtenir les coordonnées de la cible actuelle à partir de la base
- joie
- move_base
- amcl
- gmapping
Une partie des nœuds du mobile:- rosserial_arduino
- rplidar_ros
Ce robot a toutes les chances de devenir un projet commercial distinct.Il y a encore beaucoup de travail:- besoin de créer un modèle urdf
- développer des scénarios d'utilisation de la plateforme
- envisager la compatibilité avec d'autres équipements
- configurer le travail de plusieurs robots en même temps
Autres options de logement Si vous souhaitez acheter ce kit pour le coût des composants ou si vous souhaitez faire partie du projet et développer ce produit avec nous, écrivez-moi https://forms.yandex.ru/u/5e3d0be770f10402303acf87/Source: https://habr.com/ru/post/undefined/
All Articles