 polargraph.co.ukDicen que los rusos aprovechan durante mucho tiempo, pero van rápido. La idea de recopilar medio párrafo surgió hace 5 años después de leer un artículo sobre un reproductor en unidades de disquete . Primero encontré un drawbot en disquete, y luego medio párrafo. No preguntes cuál es la relación entre esto, no lo es. En su mayoría utiliza el manual con instructables .
polargraph.co.ukDicen que los rusos aprovechan durante mucho tiempo, pero van rápido. La idea de recopilar medio párrafo surgió hace 5 años después de leer un artículo sobre un reproductor en unidades de disquete . Primero encontré un drawbot en disquete, y luego medio párrafo. No preguntes cuál es la relación entre esto, no lo es. En su mayoría utiliza el manual con instructables .Accesorios
- Arduino uno
- Controlador de motor Motorshield de AdaFruit. Tenía un Motor Drive Shield L293D para Arduino / Wze.
- 2 motores paso a paso NEMA-17. Usé el Hybrid Stepping Motor 42BYGH202 / Wze.

- Fuente de alimentación AC / DC
- Góndola. Lo hice desde un soporte de disco, necesito hacer dos agujeros para conectar los cables y el tercero para la carga.

instructables.com - Chasis de bobinas de la máquina de coser (hay un espacio entre la bobina y el eje del motor, puse un pedazo de goma). Es mejor usar hilo de pescar, en lugar de hilo.
- La superficie sobre la cual se montan los motores. Cuanto más grande, mejor. El autor con instructables utilizó soportes de motor (soportes), simplemente los pegué al cartón que pegué a la tableta A2.
Arduino
Instale la última versión de Arduino IDE (la anterior no puede cargar el código). Establezca la ruta a la carpeta con los bocetos (/ bocetos /): Archivo -> Configuración -> Ubicación de la carpeta de bocetos.Descargue el código del euphy github .Descomprima el archivo. Copie las bibliotecas Adafruit y AccelStepper en la carpeta / sketches / collections /, la carpeta polargraph_server_a1 en la carpeta / sketches /.Inicie el IDE Arduino. Archivo -> Carpeta con bocetos -> polargraph_server_a1. Compilamos, subimos al tablero.Motores paso a paso
Sobre los motores paso a paso hay un maravilloso artículo sobre Habr. Por prueba y error, los conecté a la placa: el motor izquierdo - a los terminales M1, M2, el derecho - M3, M4.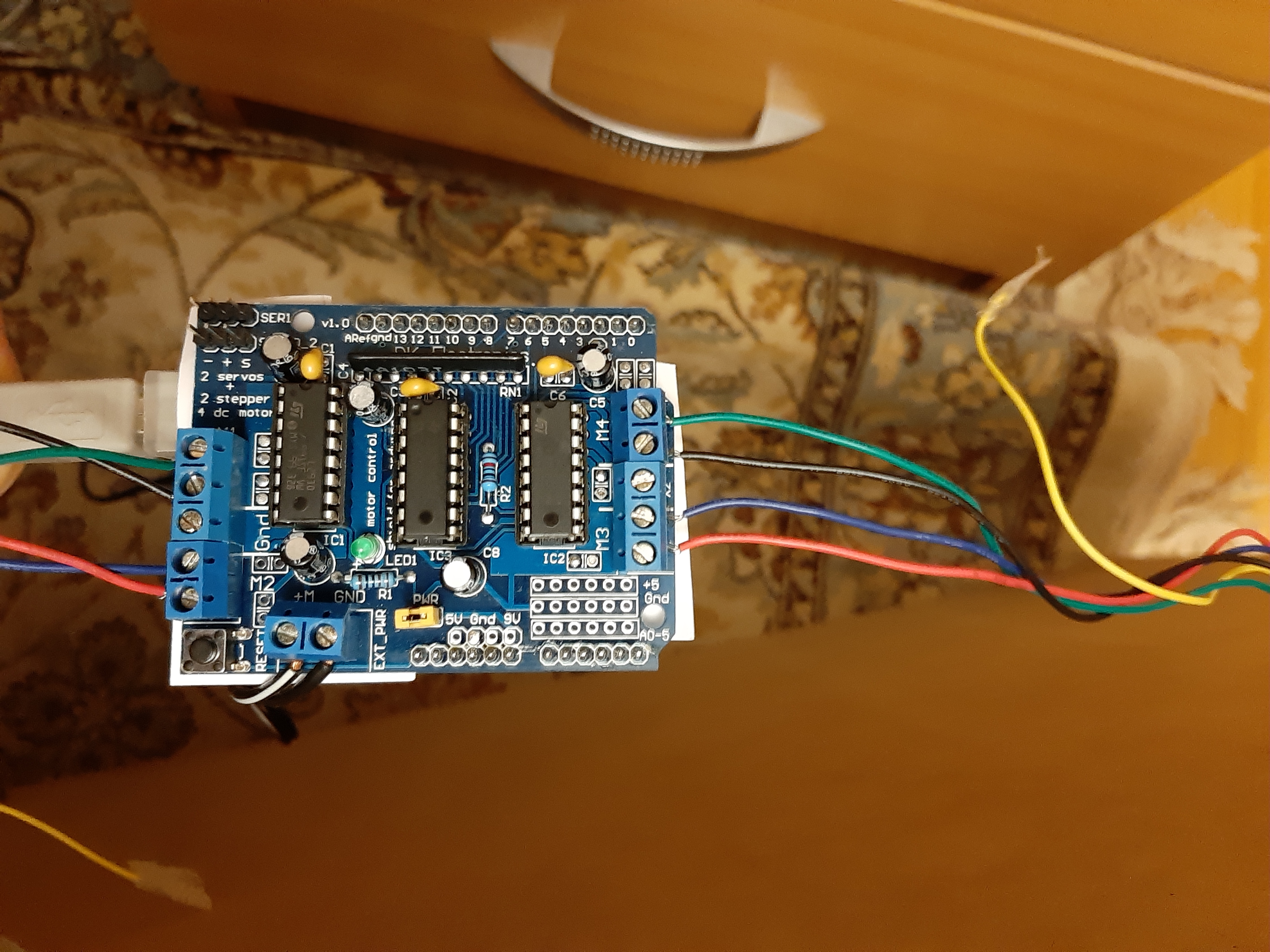
Instalación de software
Desde el archivo euphy descargado previamente, desempaquete la carpeta / controller /.En el archivo default.properties.txt , especifique las dimensiones necesarias: ancho y largo de la máquina, ancho y largo de la hoja, punto de inicio. Deben medirse con bastante precisión, al milímetro, de lo contrario habrá distorsiones en la imagen. Mostraré un ejemplo a continuación, resultó de esa manera.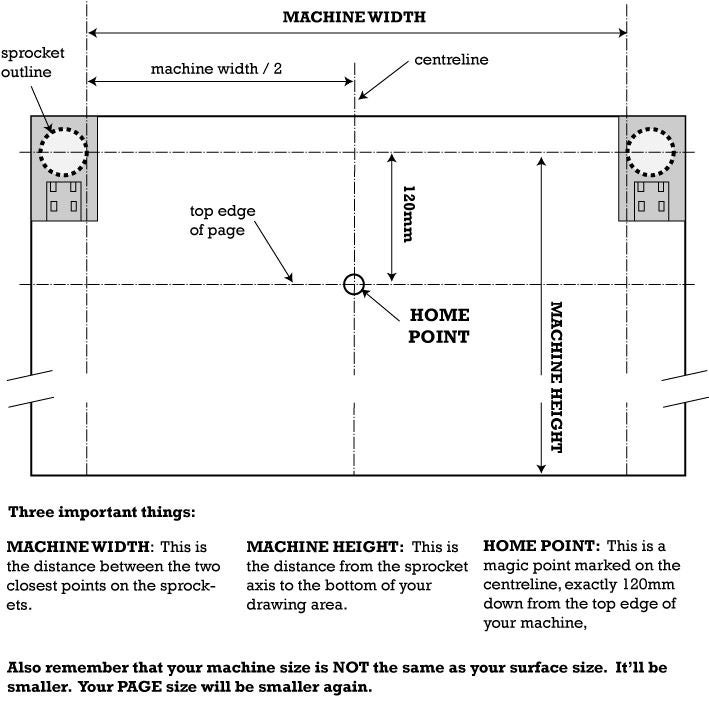 instructables.comInicie la aplicación:
instructables.comInicie la aplicación:sudo chmod +x polargraphcontroller
./polargraphcontroller
 En la pestaña CONFIGURACIÓN, seleccione el puerto deseado (PUERTO SERIAL). Una inscripción verde debe aparecer en la parte superior de que el poshraf está listo. Coloque la góndola en el punto de PUNTO DE INICIO.En la pestaña ENTRADA, seleccione CARGAR IMAGEN. Cargue la imagen, cambie el tamaño si es necesario (REDIMENSIONAR IMAGEN). Mueva la imagen (MOVER IMAGEN) al área de la hoja, seleccione el fragmento deseado (SELECCIONAR ÁREA), reduzca el TAMAÑO DE REJILLA si es necesario y presione RENDER PIXELS. En la ventana emergente, debe elegir dónde comienzan el dibujo (SUPERIOR-DERECHA) y el estilo (ONDA CUADRADA DE TAMAÑO VARIABLE).
En la pestaña CONFIGURACIÓN, seleccione el puerto deseado (PUERTO SERIAL). Una inscripción verde debe aparecer en la parte superior de que el poshraf está listo. Coloque la góndola en el punto de PUNTO DE INICIO.En la pestaña ENTRADA, seleccione CARGAR IMAGEN. Cargue la imagen, cambie el tamaño si es necesario (REDIMENSIONAR IMAGEN). Mueva la imagen (MOVER IMAGEN) al área de la hoja, seleccione el fragmento deseado (SELECCIONAR ÁREA), reduzca el TAMAÑO DE REJILLA si es necesario y presione RENDER PIXELS. En la ventana emergente, debe elegir dónde comienzan el dibujo (SUPERIOR-DERECHA) y el estilo (ONDA CUADRADA DE TAMAÑO VARIABLE). A la derecha, para iniciar la cola de comandos, haga clic en la inscripción roja (se vuelve verde): ommandQueue: QUEUE RUNNING.Me llevó alrededor de una hora dibujar la inscripción. Doodle en la parte superior derecha, porque primero elegí el estilo SCRIBBLE. La compresión del eje Y es visible debido a mediciones inexactas.
A la derecha, para iniciar la cola de comandos, haga clic en la inscripción roja (se vuelve verde): ommandQueue: QUEUE RUNNING.Me llevó alrededor de una hora dibujar la inscripción. Doodle en la parte superior derecha, porque primero elegí el estilo SCRIBBLE. La compresión del eje Y es visible debido a mediciones inexactas. La velocidad del polarógrafo.
La velocidad del polarógrafo.