Hola Habr!Este artículo describe el sufrimiento de un principiante en el proceso de fabricación de una plataforma de plataforma autopropulsada basada en esp8266 MK con micropython , administrada a través de un servidor web integrado.KDPV: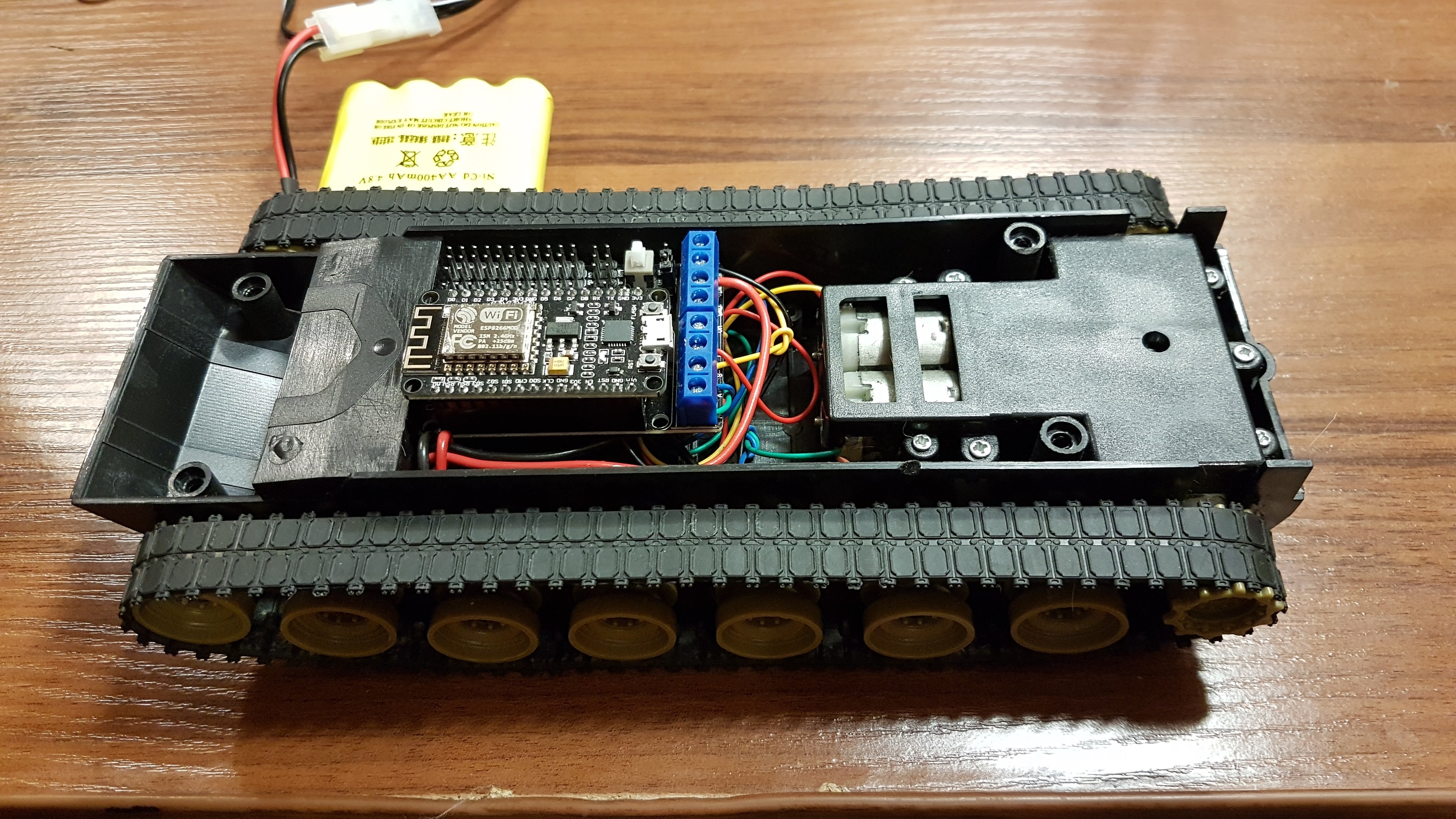 Como mencioné en el primer artículo , el proyecto es educativo, por lo tanto, no juzgue estrictamente.Entonces, la tarea de la primera etapa es hacer una plataforma de oruga que se pueda controlar a través de wi-fi.Con qué propósito en los contenedores se encontró un viejo tanque de juguete, y también se compraron MK esp8266 (ESP-12E) y un controlador de motor.Además, todo lo anterior se recopiló de acuerdo con el esquema:
Como mencioné en el primer artículo , el proyecto es educativo, por lo tanto, no juzgue estrictamente.Entonces, la tarea de la primera etapa es hacer una plataforma de oruga que se pueda controlar a través de wi-fi.Con qué propósito en los contenedores se encontró un viejo tanque de juguete, y también se compraron MK esp8266 (ESP-12E) y un controlador de motor.Además, todo lo anterior se recopiló de acuerdo con el esquema: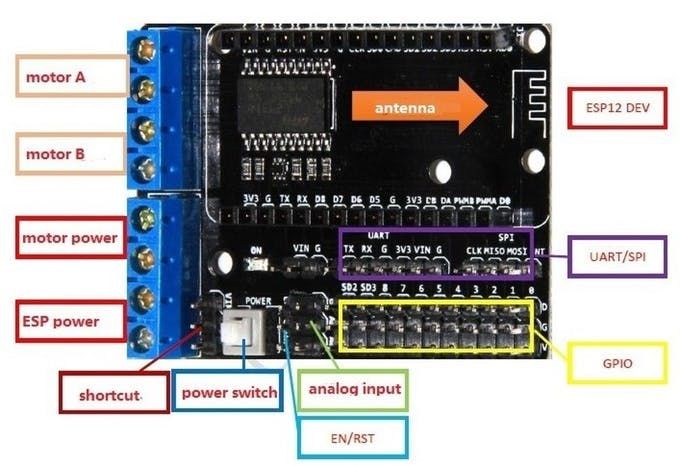 y después de un
y después de un par de días de un breve estudio de la documentación , quedó claro cómo controlar los motores:from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
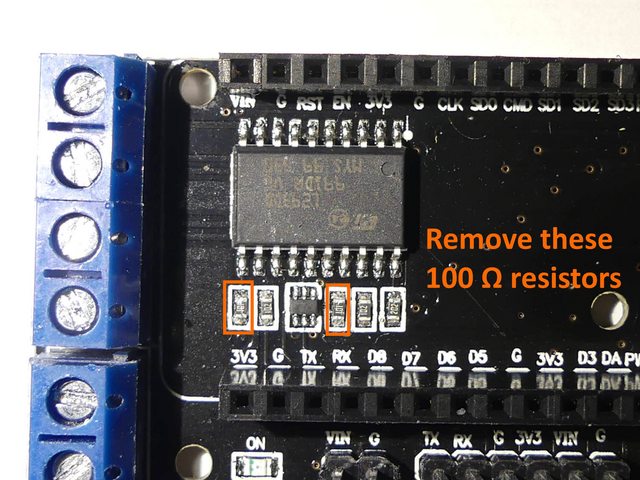
Por lo tanto, pin5 y pin4 - le permiten configurar la velocidad de rotación de los motores a través del PWM, y pin0 y pin2 - controlan el reverso de las salidas "A" y "B", respectivamente. Además, dado que el LED también está conectado al pin2 en mi placa, observamos efectos de luz en paralelo con el movimiento :)Sin embargo, no despegó de inmediato ...Google sobre un tema dado condujo a un foro donde había una recomendación para eliminar dos resistencias "adicionales", Lo cual fue hecho. Cita a partir de ahí:Medí estas resistencias, en la entrada al L293DD, la resistencia es de 1K, pero tienen una resistencia de solo 100 ohmios a tierra. Esto significa que la señal de entrada del controlador NodeMCU no puede alcanzar el L293DD. Realmente no sé por qué están allí: L293DD puede procesar hasta 7 V en su entrada, y NodeMCU proporciona una salida de 3,3 V. Quité
estas dos resistencias de 100 ohmios (el primero y el tercero a la izquierda cuando la antena está a la derecha), y ahora El escudo funciona.
 Después de eso, las cosas salieron bien y
Después de eso, las cosas salieron bien yversión final del código
import network
import socket
from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT)
servo_2 = Pin(4, Pin.OUT)
revrs_L = Pin(0, Pin.OUT, value=0)
revrs_R = Pin(2, Pin.OUT, value=0)
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
""" function for connecting to your local WiFi network """
def do_connect():
essid = 'home_wifi'
password = '12345678'
sta_if = network.WLAN(network.STA_IF)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect(essid, password)
while not sta_if.isconnected():
pass
print('network config:', sta_if.ifconfig())
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
def web_page(request):
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
forward()
if request.find('GET /?left') > 0:
motor_state="Rotate Left"
left()
if request.find('GET /?right') > 0:
motor_state="Rotate Right"
right()
if request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
left_turn()
if request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
right_turn()
if request.find('GET /?backward') > 0:
motor_state="Going Backward"
backward()
if request.find('GET /?stop') > 0:
motor_state="Stopped"
stop_all()
html = """<html><head><title>RoboTank WEB</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="data:,"> <style>
html{font-family: Helvetica; display:inline-block; margin: 0px auto; text-align: center;}
h1{color: #0F3376; padding: 2vh;}p{font-size: 1.5rem;}
.button{display: inline-block; background-color: #33c080; border: none;
border-radius: 4px; color: white; text-decoration: none; font-size: 30px; width:100%}
.button2{background-color: #4286f4; width:30%}
.button3{background-color: #eb2b10; width:35%}
.button4{background-color: #8386f4; width:44%}
</style></head>
<body> <h1>RoboTank WEB</h1>
<p>Status : <strong>""" + motor_state + """</strong></p>
<p><a href='/?forward'><button class="button">Forward</button></a></p>
<p><a href='/?left_turn'><button class="button button2">LEFT</button></a>
<a href='/?stop'><button class="button button3">STOP</button></a>
<a href='/?right_turn'><button class="button button2">RIGHT</button></a>
<p><a href='/?backward'><button class="button">Backward</button></a></p>
<p><a href='/?left'><button class="button button4">L-rotate</button></a>
<a href='/?right'><button class="button button4">R-rotate</button></a></p>
</body></html>"""
return html
stop_all()
do_connect()
addr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]
s = socket.socket()
try:
s.bind(addr)
s.listen(1)
except:
s.close()
s.bind(addr)
s.listen(1)
while True:
conn, addr = s.accept()
print('Got a connection from %s' % str(addr))
request = conn.recv(1024)
request = str(request)
print('The Content = %s' % request)
response = web_page(request)
conn.send('HTTP/1.1 200 OK\n')
conn.send('Content-Type: text/html\n')
conn.send('Connection: close\n\n')
conn.sendall(response)
conn.close()
Resultó ser bastante eficiente y resolvió con éxito la tarea establecida en la primera etapa.El primer pokatushki:Primera parte (Instalar micropython en ESP8266 y trabajar con él en Linux)Siguiente parte (Robot simple en MK esp8266 con micropython)Fuentes de inspiración:funprojects.blog/2019/02/12/micropython-air-boatwww.instructables.com/id / más simple-Wifi-Car-Utilizando-ESP8266-Motorshieldforum.micropython.org/viewtopic.php?t=3977randomnerdtutorials.com/esp32-esp8266-micropython-web-serverdocs.micropython.org/en/latest/esp8266/ tutorial / index.html