Ensamblar un magnetómetro portátil
Traducción de un artículo del sitio de materiales de capacitación de Instructables Un magnetómetro , a veces también llamado gaussómetro, mide la fuerza de un campo magnético [ en este caso, inducción magnética / aprox. perev. ] Este es un dispositivo necesario para medir la fuerza de imanes permanentes y electroimanes, así como para establecer la forma de campo de combinaciones no impositivas de imanes. Es lo suficientemente sensible como para detectar la magnetización de objetos metálicos. Si la sonda funciona lo suficientemente rápido, podrá detectar campos que varían en el tiempo de motores y transformadores.Los teléfonos móviles generalmente tienen un magnetómetro de tres ejes, pero está optimizado para un campo magnético débil de la Tierra con una fuerza de 1 Gauss = 0.1 mT [ mililitros] y está saturado en campos con inducción de varios mT. Por lo general, no está claro dónde se encuentra exactamente este sensor en el teléfono, y a menudo es imposible colocarlo dentro de un cuello de botella, como un corte de imán. Además, es mejor no llevar el teléfono inteligente a imanes potentes.En este artículo describiré cómo hacer el magnetómetro portátil más simple a partir de componentes comunes: necesitamos un sensor Hall lineal, Arduino, una pantalla y un botón. El costo total del dispositivo no supera los 5 €, y medirá la inducción de -100 a +100 mT con un error de 0.01 mT, mucho mejor de lo que cabría esperar. Para obtener indicadores absolutos precisos, deberá calibrarlo: describiré cómo se hace esto con la ayuda de un solenoide casero de larga duración.
magnetómetro , a veces también llamado gaussómetro, mide la fuerza de un campo magnético [ en este caso, inducción magnética / aprox. perev. ] Este es un dispositivo necesario para medir la fuerza de imanes permanentes y electroimanes, así como para establecer la forma de campo de combinaciones no impositivas de imanes. Es lo suficientemente sensible como para detectar la magnetización de objetos metálicos. Si la sonda funciona lo suficientemente rápido, podrá detectar campos que varían en el tiempo de motores y transformadores.Los teléfonos móviles generalmente tienen un magnetómetro de tres ejes, pero está optimizado para un campo magnético débil de la Tierra con una fuerza de 1 Gauss = 0.1 mT [ mililitros] y está saturado en campos con inducción de varios mT. Por lo general, no está claro dónde se encuentra exactamente este sensor en el teléfono, y a menudo es imposible colocarlo dentro de un cuello de botella, como un corte de imán. Además, es mejor no llevar el teléfono inteligente a imanes potentes.En este artículo describiré cómo hacer el magnetómetro portátil más simple a partir de componentes comunes: necesitamos un sensor Hall lineal, Arduino, una pantalla y un botón. El costo total del dispositivo no supera los 5 €, y medirá la inducción de -100 a +100 mT con un error de 0.01 mT, mucho mejor de lo que cabría esperar. Para obtener indicadores absolutos precisos, deberá calibrarlo: describiré cómo se hace esto con la ayuda de un solenoide casero de larga duración.Paso 1: Sensor Hall
El efecto Hall se usa a menudo para medir campos magnéticos. Cuando los electrones pasan a través de un conductor colocado en un campo magnético, se transportan hacia un lado, como resultado de lo cual aparece una diferencia de potencial transversal en el conductor. Al elegir el material y la geometría del semiconductor correctamente, puede obtener una señal medible, que luego puede amplificarse y producir una medición de un componente del campo magnético.Yo uso SS49E ya que es barato y asequible. Lo que vale la pena señalar de su documentación :- Potencia: 2.7 - 6.5 V, que es perfectamente compatible con 5 V para Arduino.
- Señal cero: 2.25-2.75 V, aproximadamente a mitad de camino entre 0 y 5 V.
- Sensibilidad: 1.0-1.75 mV / G, por lo que se requerirá calibración para obtener resultados precisos.
- Voltaje de salida: 1.0 - 4.0 V (para operación desde 5 V): el rango está cubierto por el ADC Arduino.
- Rango: mínimo ± 650 Gs, generalmente + / 1 1000 Gs.
- Tiempo de respuesta: 3 μs, es decir, es posible realizar mediciones con una frecuencia de decenas de kHz.
- Corriente de funcionamiento: 6-10 mA, suficiente para una batería.
- Error de temperatura: 0.1% por grado Celsius. Parece un poco, pero una desviación del 0.1% da un error de 3 mT.
El sensor es compacto, 4x3x3 mm, y mide el componente del campo magnético perpendicular a su lado frontal. Da un valor positivo para los campos que van de atrás hacia adelante, por ejemplo, cuando se enfrenta al polo sur de un imán. El sensor tiene tres contactos, +5 V, 0 V y la salida es de izquierda a derecha cuando se ve desde la cara.Paso 2: Materiales requeridos
- Sensor de efecto Hall lineal SS49E. 1 € por 10 piezas.
- Arduino Uno con placa de prototipos o Arduino Nano sin clavijas para la versión portátil.
- Pantalla OLED monocromática SSD1306 0.96 ”con interfaz I2C.
- Botón.
Para sonda:- Bolígrafo u otro tubo duradero.
- 3 alambres delgados un poco más largos que el tubo.
- 12 cm termorretráctil con un diámetro de 1,5 mm.
Para la versión portátil:- Una gran caja Tic-Tac (18x46x83) o algo similar.
- Contactos de batería de 9V
- Cambiar.
Paso 3: Primera versión: uso de la placa de creación de prototipos
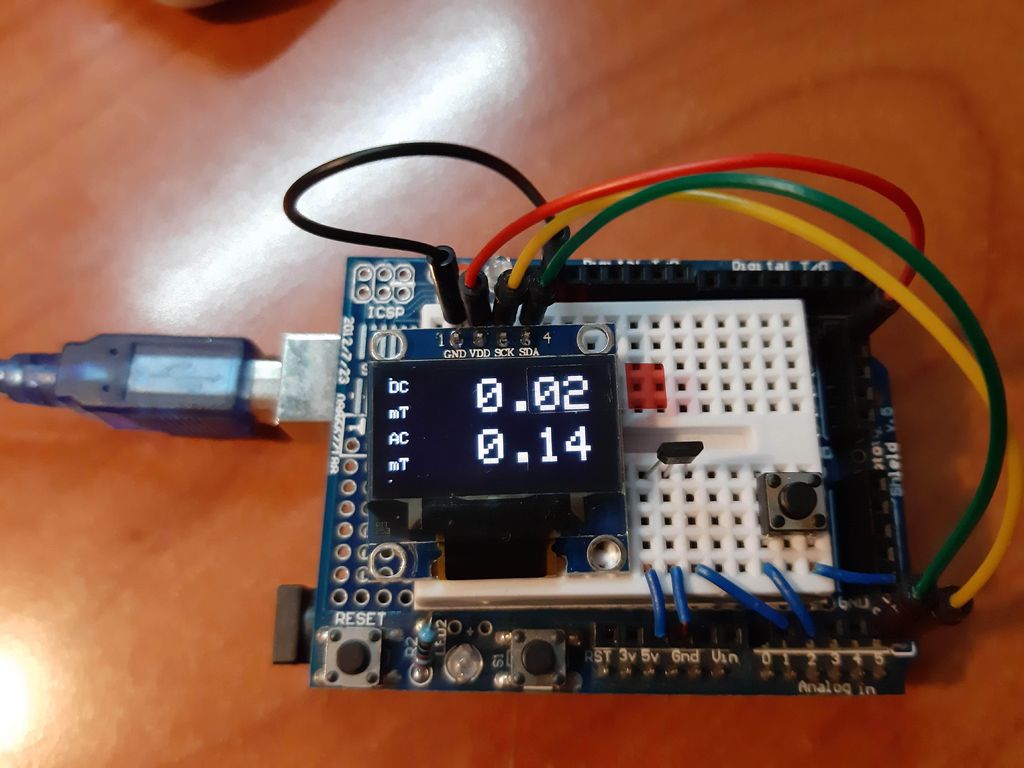
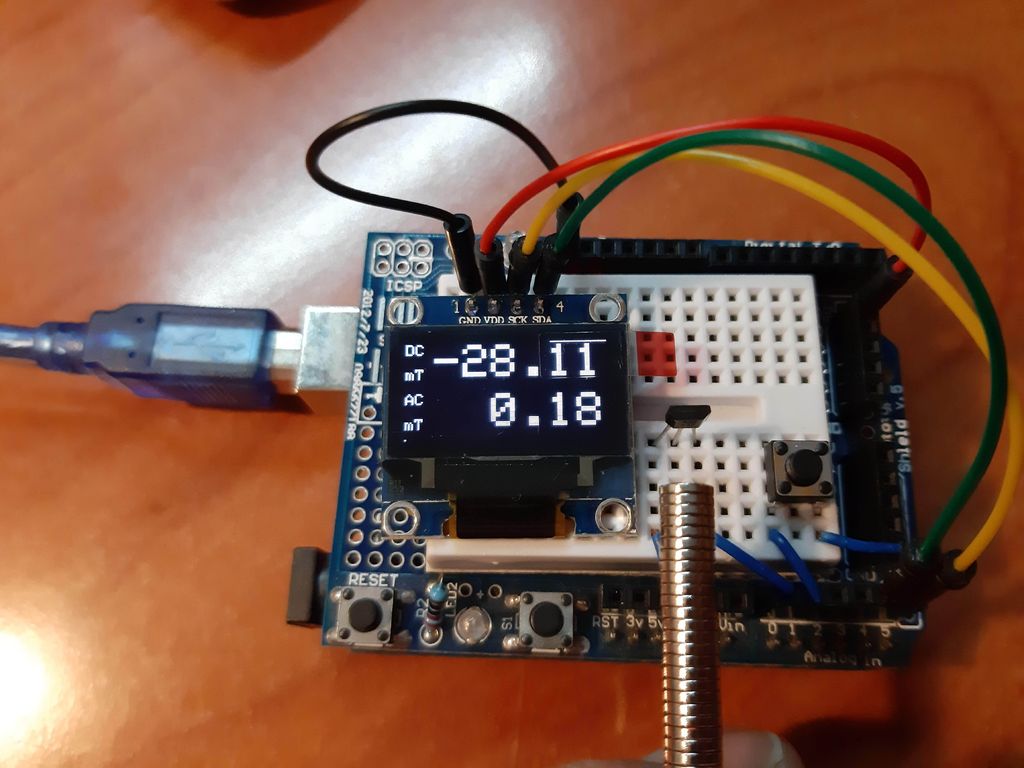 Primero, ¡siempre construya un prototipo para probar el funcionamiento de todos los componentes y software! La conexión es visible en la imagen: el sensor Hall está conectado a los contactos Arduino + 5V, GND, A1 (de izquierda a derecha). La pantalla se conecta a GND, + 5V, A5, A4 (de izquierda a derecha). El botón, cuando se presiona, debe cerrar el suelo y A0.Código escrito en Arduino IDE v. 1.8.10. Requiere la instalación de las bibliotecas Adafruit_SSD1306 y Adafruit_GFX.Si todo se hace correctamente, la pantalla debe mostrar los valores de CC y CA.
Primero, ¡siempre construya un prototipo para probar el funcionamiento de todos los componentes y software! La conexión es visible en la imagen: el sensor Hall está conectado a los contactos Arduino + 5V, GND, A1 (de izquierda a derecha). La pantalla se conecta a GND, + 5V, A5, A4 (de izquierda a derecha). El botón, cuando se presiona, debe cerrar el suelo y A0.Código escrito en Arduino IDE v. 1.8.10. Requiere la instalación de las bibliotecas Adafruit_SSD1306 y Adafruit_GFX.Si todo se hace correctamente, la pantalla debe mostrar los valores de CC y CA.Paso 4: un poco sobre el código
Si no está interesado en el código, puede omitir esta parte.Una característica clave del código es que el campo magnético se mide 2.000 veces seguidas. Tarda 0.2 - 0.3 segundos. Al rastrear la suma y el cuadrado de la suma de las mediciones, es posible calcular las desviaciones medias y estándar, que se dan como DC y AC. Promediando un gran número de mediciones, aumentamos la precisión, teóricamente en √2000 ≈ 45. ¡Resulta que usando un ADC de 10 bits, obtenemos la precisión de un ADC de 15 bits! Y es importante: 1 paso del ADC es de 4 mV, es decir, ~ 0.3 mT. Debido al promedio, reducimos el error de 0.3 mT a 0.01 mT.Como beneficio adicional, obtenemos la desviación estándar, lo que determina el campo cambiante. Un campo que oscila con una frecuencia de 50 Hz pasa por unos 10 ciclos durante la medición, por lo que puede medir el valor de CA.Después de la compilación, obtuve las siguientes estadísticas: Sketch utiliza 16852 bytes (54%) del espacio de almacenamiento del programa. El máximo es 30720 bytes. Las variables globales usan 352 bytes (17%) de memoria dinámica, dejando 1696 bytes para las variables locales. El máximo es 2048 bytes.La mayor parte del espacio está ocupado por las bibliotecas Adafruit, pero todavía hay mucho espacio para agregar funcionalidad.Paso 5: cocinar la sonda
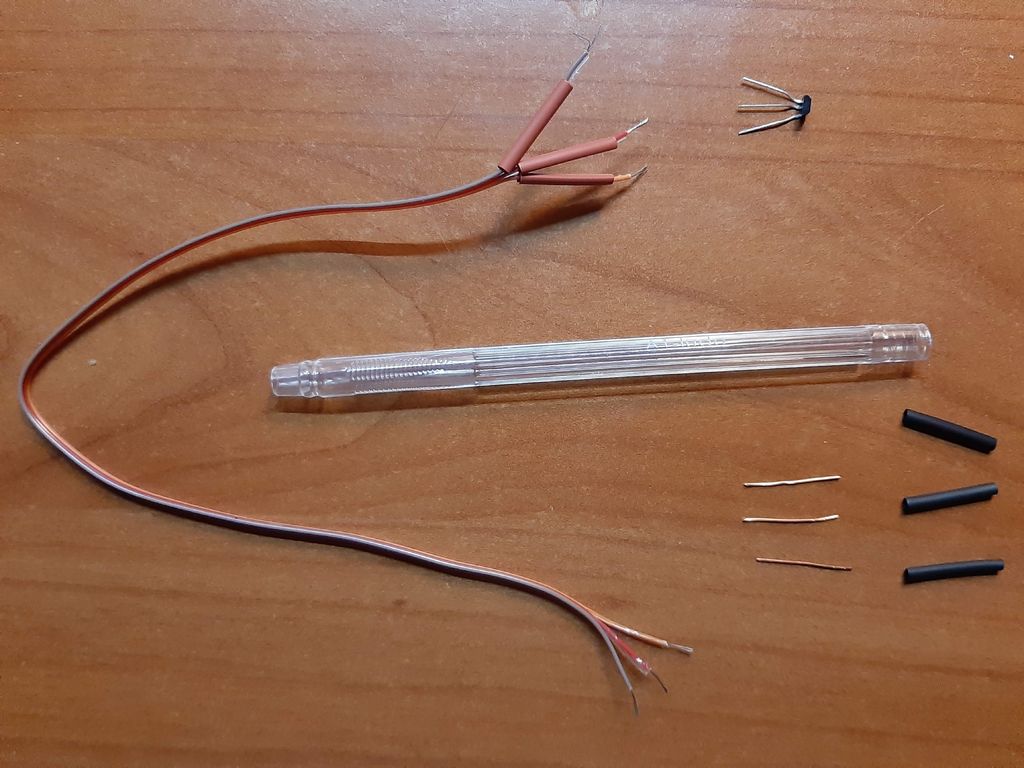
 La sonda se fija mejor al final de un tubo estrecho: simplemente se colocará y se mantendrá en lugares estrechos. Cualquier tubo hecho de material no magnético servirá. El viejo bolígrafo era perfecto para mí.Prepare tres alambres flexibles delgados un poco más largos que el tubo. En mi cable no hay lógica en los colores de los cables (naranja + 5 V, rojo 0 V, gris - señal), es más fácil para mí recordarlos.Para usar una sonda con un prototipo, suelde trozos de alambre al extremo del cable y aíslelos con termocontracción. Más tarde se pueden cortar y soldar directamente al Arduino.
La sonda se fija mejor al final de un tubo estrecho: simplemente se colocará y se mantendrá en lugares estrechos. Cualquier tubo hecho de material no magnético servirá. El viejo bolígrafo era perfecto para mí.Prepare tres alambres flexibles delgados un poco más largos que el tubo. En mi cable no hay lógica en los colores de los cables (naranja + 5 V, rojo 0 V, gris - señal), es más fácil para mí recordarlos.Para usar una sonda con un prototipo, suelde trozos de alambre al extremo del cable y aíslelos con termocontracción. Más tarde se pueden cortar y soldar directamente al Arduino.Paso 6: Montaje del instrumento portátil
 La batería de 9V, la pantalla OLED y el Arduino Nano caben cómodamente dentro de una gran caja Tic-Tac. Su ventaja es la transparencia: la pantalla es fácil de leer, incluso dentro. Todos los componentes fijos (sonda, interruptor y botón) se colocan en la cubierta para que todo se pueda quitar de la caja para reemplazar la batería o actualizar el código.Nunca me gustaron las baterías de 9V, tienen un alto precio y baja capacidad. Pero en mi supermercado, de repente comenzaron a vender su versión recargable de NiMH por 1 €, y descubrí que eran fáciles de cargar si se alimentaban 11 V a través de una resistencia de 100 Ohm y se dejaban durante la noche. Pedí conectores de batería baratos para mí, pero no me los enviaron, así que desarmé la batería vieja de 9 V para hacer un conector. Además de las baterías de 9V en su tamaño compacto, y en eso Arduino funciona bien cuando está conectado a Vin. A +5 V habrá un voltaje ajustable de 5 V, que será necesario para el OLED y el sensor Hall.El sensor Hall, la pantalla y el botón están conectados de la misma manera que en el prototipo. Solo se agrega el botón de encendido, entre la batería y el Arduino.
La batería de 9V, la pantalla OLED y el Arduino Nano caben cómodamente dentro de una gran caja Tic-Tac. Su ventaja es la transparencia: la pantalla es fácil de leer, incluso dentro. Todos los componentes fijos (sonda, interruptor y botón) se colocan en la cubierta para que todo se pueda quitar de la caja para reemplazar la batería o actualizar el código.Nunca me gustaron las baterías de 9V, tienen un alto precio y baja capacidad. Pero en mi supermercado, de repente comenzaron a vender su versión recargable de NiMH por 1 €, y descubrí que eran fáciles de cargar si se alimentaban 11 V a través de una resistencia de 100 Ohm y se dejaban durante la noche. Pedí conectores de batería baratos para mí, pero no me los enviaron, así que desarmé la batería vieja de 9 V para hacer un conector. Además de las baterías de 9V en su tamaño compacto, y en eso Arduino funciona bien cuando está conectado a Vin. A +5 V habrá un voltaje ajustable de 5 V, que será necesario para el OLED y el sensor Hall.El sensor Hall, la pantalla y el botón están conectados de la misma manera que en el prototipo. Solo se agrega el botón de encendido, entre la batería y el Arduino.Paso 7: Calibración
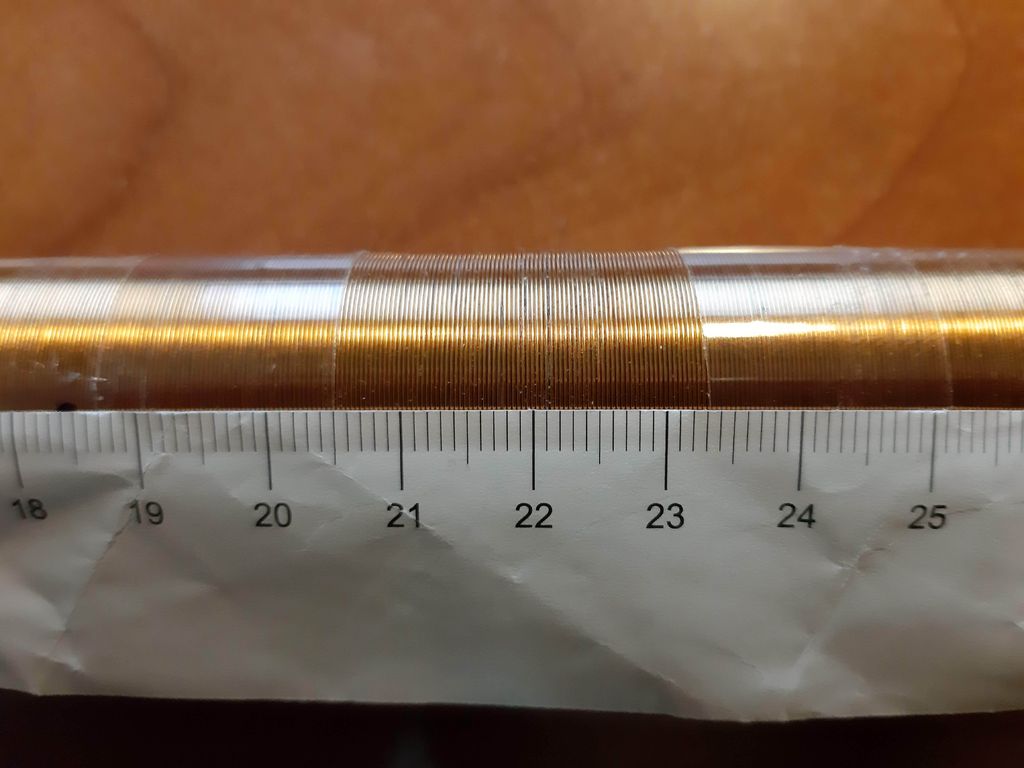

 La constante de calibración en el código corresponde al número prescrito en la documentación (1.4 mV / G), sin embargo, el rango de este valor (1.0-1.75 mV / G) está permitido en la documentación. Para obtener resultados precisos, debe calibrar la sonda.La forma más fácil de obtener un campo magnético bien definido es usar un solenoide. La inducción magnética del campo de solenoide es B = μ 0 * n * I. La constante magnética (o permeabilidad magnética del vacío) es una constante natural: μ 0 = 1.2566 x 10 -6T / m / A. El campo es uniforme y depende solo de la densidad del devanado ny la corriente I, que se puede medir con un error de aproximadamente 1%. La fórmula funciona para un solenoide de longitud infinita, pero sirve como una muy buena aproximación para el campo en su centro si la relación entre su longitud y su diámetro excede 10.Para ensamblar un solenoide adecuado, tome un tubo cilíndrico hueco 10 veces más largo que el diámetro y enrolle desde un aislamiento. cables Utilicé un tubo de PVC con un diámetro externo de 23 mm e hice 566 vueltas extendiéndose 20,2 cm, lo que nos da n = 28 / cm = 2800 / m. La longitud del cable es de 42 m, la resistencia es de 10 ohmios.Aplique energía a la bobina y mida la corriente con un multímetro. Use una fuente de corriente ajustable o una resistencia variable para controlar la corriente. Mida el campo magnético para diferentes valores de corriente y compare las lecturas.Antes de la calibración, recibí 6.04 mT / A, aunque en teoría debería haber sido 3.50 mT / A. Por lo tanto, multipliqué la constante de calibración en la línea 18 del código por 0.58. Hecho: ¡el magnetómetro está calibrado!
La constante de calibración en el código corresponde al número prescrito en la documentación (1.4 mV / G), sin embargo, el rango de este valor (1.0-1.75 mV / G) está permitido en la documentación. Para obtener resultados precisos, debe calibrar la sonda.La forma más fácil de obtener un campo magnético bien definido es usar un solenoide. La inducción magnética del campo de solenoide es B = μ 0 * n * I. La constante magnética (o permeabilidad magnética del vacío) es una constante natural: μ 0 = 1.2566 x 10 -6T / m / A. El campo es uniforme y depende solo de la densidad del devanado ny la corriente I, que se puede medir con un error de aproximadamente 1%. La fórmula funciona para un solenoide de longitud infinita, pero sirve como una muy buena aproximación para el campo en su centro si la relación entre su longitud y su diámetro excede 10.Para ensamblar un solenoide adecuado, tome un tubo cilíndrico hueco 10 veces más largo que el diámetro y enrolle desde un aislamiento. cables Utilicé un tubo de PVC con un diámetro externo de 23 mm e hice 566 vueltas extendiéndose 20,2 cm, lo que nos da n = 28 / cm = 2800 / m. La longitud del cable es de 42 m, la resistencia es de 10 ohmios.Aplique energía a la bobina y mida la corriente con un multímetro. Use una fuente de corriente ajustable o una resistencia variable para controlar la corriente. Mida el campo magnético para diferentes valores de corriente y compare las lecturas.Antes de la calibración, recibí 6.04 mT / A, aunque en teoría debería haber sido 3.50 mT / A. Por lo tanto, multipliqué la constante de calibración en la línea 18 del código por 0.58. Hecho: ¡el magnetómetro está calibrado! Source: https://habr.com/ru/post/undefined/
All Articles