Cómo funcionan los sensores de estacionamiento y cómo engañarlo
 Un buen día ... ¿Por qué estoy mintiendo? No fue tan hermoso el día en que mis sensores de estacionamiento domésticos y chinos instalados por el propietario anterior murieron. Hay que hacer algo, pero ¿qué? ¿Comprar otro producto terminado en cualquier plataforma en línea? No interesado. En la red y en el concentrador, hay una cantidad suficiente de materiales en el reverso del protocolo de comunicación de la unidad con el indicador o al crear sus propios sensores de estacionamiento en Arduino . Y puedes seguir uno de estos caminos. Pero esto no es lo que el alma deseaba. Y ella quería algo más a tiempo completo, cercano en ejecución a la electrónica automotriz.No es ningún secreto para nadie que el rendimiento y la circuitería de la electrónica automotriz es algo diferente de la electrónica doméstica, al igual que sus componentes electrónicos. Quería algo como esto, "real". En este día, surgió la idea de introducir sensores de estacionamiento condicionalmente nativos. Al menos sensores de estacionamiento, que se colocaron en automóviles en la fábrica o al menos en el camino desde la fábrica hasta el usuario final. Y dado que ahora tengo Toyota, y un Toyota de mediana edad suele ser electrónica Denso, se decidió recopilar sensores de estacionamiento en lo que los oficiales y no tan distribuidores configuraron para crear automóviles Toyota "nuevos". Una vez que se trataba de un conjunto de equipos adicionales de fábrica, cuya instalación y operación está bastante bien documentada por el fabricante.La elección recayó en el bloque Denso 188100-2410, como el más común. Ya sabía que el bloque requiere seis sensores (4 angulares y 2 traseros), pero no iba a poner 2 frontales angulares y me di cuenta de que el bloque resistiría violentamente la ausencia del par frontal (los errores correspondientes se describieron en la documentación). ¿Pero qué parecía más fácil? ¿Cómo puede detectar la falta de sensores? Sí, excepto por la resistencia a la carga, pensé, está bien: tírenle las resistencias para la emulación. Y comenzó la búsqueda del kit.Pasó un tiempo y el conjunto de la unidad, el cableado y los sensores se colocaron de manera uniforme en el piso del taller, se hicieron todas las conexiones, aquí está, un momento alegre de la primera inclusión. Y, como era de esperar, jura por la falta de sensores. En lugar de faltar sensores, agrego resistencias con el pensamiento: "Bueno, qué puede hacer allí, excepto para medir el consumo de corriente". Pero diferentes valores razonables de resistencias no afectan a la unidad, y continúa votando sobre la ausencia de sensores. Nezhdanchik. Google rápido no dio una respuesta a mis preguntas, que fue la razón para escribir este artículo.
Un buen día ... ¿Por qué estoy mintiendo? No fue tan hermoso el día en que mis sensores de estacionamiento domésticos y chinos instalados por el propietario anterior murieron. Hay que hacer algo, pero ¿qué? ¿Comprar otro producto terminado en cualquier plataforma en línea? No interesado. En la red y en el concentrador, hay una cantidad suficiente de materiales en el reverso del protocolo de comunicación de la unidad con el indicador o al crear sus propios sensores de estacionamiento en Arduino . Y puedes seguir uno de estos caminos. Pero esto no es lo que el alma deseaba. Y ella quería algo más a tiempo completo, cercano en ejecución a la electrónica automotriz.No es ningún secreto para nadie que el rendimiento y la circuitería de la electrónica automotriz es algo diferente de la electrónica doméstica, al igual que sus componentes electrónicos. Quería algo como esto, "real". En este día, surgió la idea de introducir sensores de estacionamiento condicionalmente nativos. Al menos sensores de estacionamiento, que se colocaron en automóviles en la fábrica o al menos en el camino desde la fábrica hasta el usuario final. Y dado que ahora tengo Toyota, y un Toyota de mediana edad suele ser electrónica Denso, se decidió recopilar sensores de estacionamiento en lo que los oficiales y no tan distribuidores configuraron para crear automóviles Toyota "nuevos". Una vez que se trataba de un conjunto de equipos adicionales de fábrica, cuya instalación y operación está bastante bien documentada por el fabricante.La elección recayó en el bloque Denso 188100-2410, como el más común. Ya sabía que el bloque requiere seis sensores (4 angulares y 2 traseros), pero no iba a poner 2 frontales angulares y me di cuenta de que el bloque resistiría violentamente la ausencia del par frontal (los errores correspondientes se describieron en la documentación). ¿Pero qué parecía más fácil? ¿Cómo puede detectar la falta de sensores? Sí, excepto por la resistencia a la carga, pensé, está bien: tírenle las resistencias para la emulación. Y comenzó la búsqueda del kit.Pasó un tiempo y el conjunto de la unidad, el cableado y los sensores se colocaron de manera uniforme en el piso del taller, se hicieron todas las conexiones, aquí está, un momento alegre de la primera inclusión. Y, como era de esperar, jura por la falta de sensores. En lugar de faltar sensores, agrego resistencias con el pensamiento: "Bueno, qué puede hacer allí, excepto para medir el consumo de corriente". Pero diferentes valores razonables de resistencias no afectan a la unidad, y continúa votando sobre la ausencia de sensores. Nezhdanchik. Google rápido no dio una respuesta a mis preguntas, que fue la razón para escribir este artículo.Cómo funcionan los sensores de estacionamiento
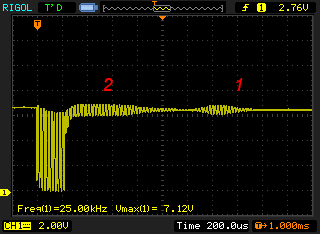
Creo que la idea general es completamente obvia para cualquier persona con antecedentes técnicos. La unidad genera un paquete de pulsos cuya frecuencia está en el rango ultrasónico. Bueno, para no impactar con los sonidos de la gente, y los desarrolladores, por regla general, no piensen en murciélagos, delfines y otros organismos más avanzados. Como hay varios sensores y la distancia para cada uno de ellos se estima por separado para no captar los reflejos de las señales emitidas por los sensores vecinos, los paquetes de impulsos para ellos están espaciados en el tiempo. Solo se muestran dos señales de esquina delantera.
Como hay varios sensores y la distancia para cada uno de ellos se estima por separado para no captar los reflejos de las señales emitidas por los sensores vecinos, los paquetes de impulsos para ellos están espaciados en el tiempo. Solo se muestran dos señales de esquina delantera.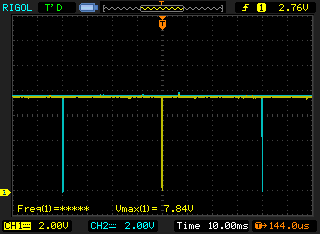 Después de enviar el paquete, la unidad espera la reflexión y, guiada por el tiempo de propagación, estima la distancia al obstáculo.El oscilograma muestra una explosión reflejada de pulsos 1 después de aproximadamente 1.3 ms, que a una velocidad de propagación del sonido de 330 m / s da aproximadamente 430 mm, es decir, con una precisión aceptable corresponde al doble de la distancia al objeto en condiciones experimentales (aproximadamente 20 cm por ojo). ¿Pero qué más es visible en esta forma de onda? Si un sensor está conectado, inmediatamente después del tren de pulsos generado por la unidad, hay un eco 2. Y si el sensor no está conectado, entonces la primera forma de onda en el texto muestra que este eco local está ausente. Como resultado, es a partir de este eco que la unidad determina la presencia y la salud condicional del sensor.
Después de enviar el paquete, la unidad espera la reflexión y, guiada por el tiempo de propagación, estima la distancia al obstáculo.El oscilograma muestra una explosión reflejada de pulsos 1 después de aproximadamente 1.3 ms, que a una velocidad de propagación del sonido de 330 m / s da aproximadamente 430 mm, es decir, con una precisión aceptable corresponde al doble de la distancia al objeto en condiciones experimentales (aproximadamente 20 cm por ojo). ¿Pero qué más es visible en esta forma de onda? Si un sensor está conectado, inmediatamente después del tren de pulsos generado por la unidad, hay un eco 2. Y si el sensor no está conectado, entonces la primera forma de onda en el texto muestra que este eco local está ausente. Como resultado, es a partir de este eco que la unidad determina la presencia y la salud condicional del sensor.Cómo engañarlo
Bueno, ahora todo está claro y obvio, comencemos. Necesitamos formar un eco de amplitud aproximadamente conocida y duración aproximadamente conocida. Esto debe hacerse de la manera más simple posible, más barata, de modo que inmediatamente a través de dos canales, y para que no haya necesidad de energía adicional (para que la conexión repita completamente los sensores nativos).Aquí me vino a la mente tal esquema (imagen en la que se puede hacer clic) en un par de canales en uno de los microcontroladores más baratos. En el diagrama, me parece, todo es bastante obvio y comprensible, si alguien tiene preguntas o sugerencias, puede comentar.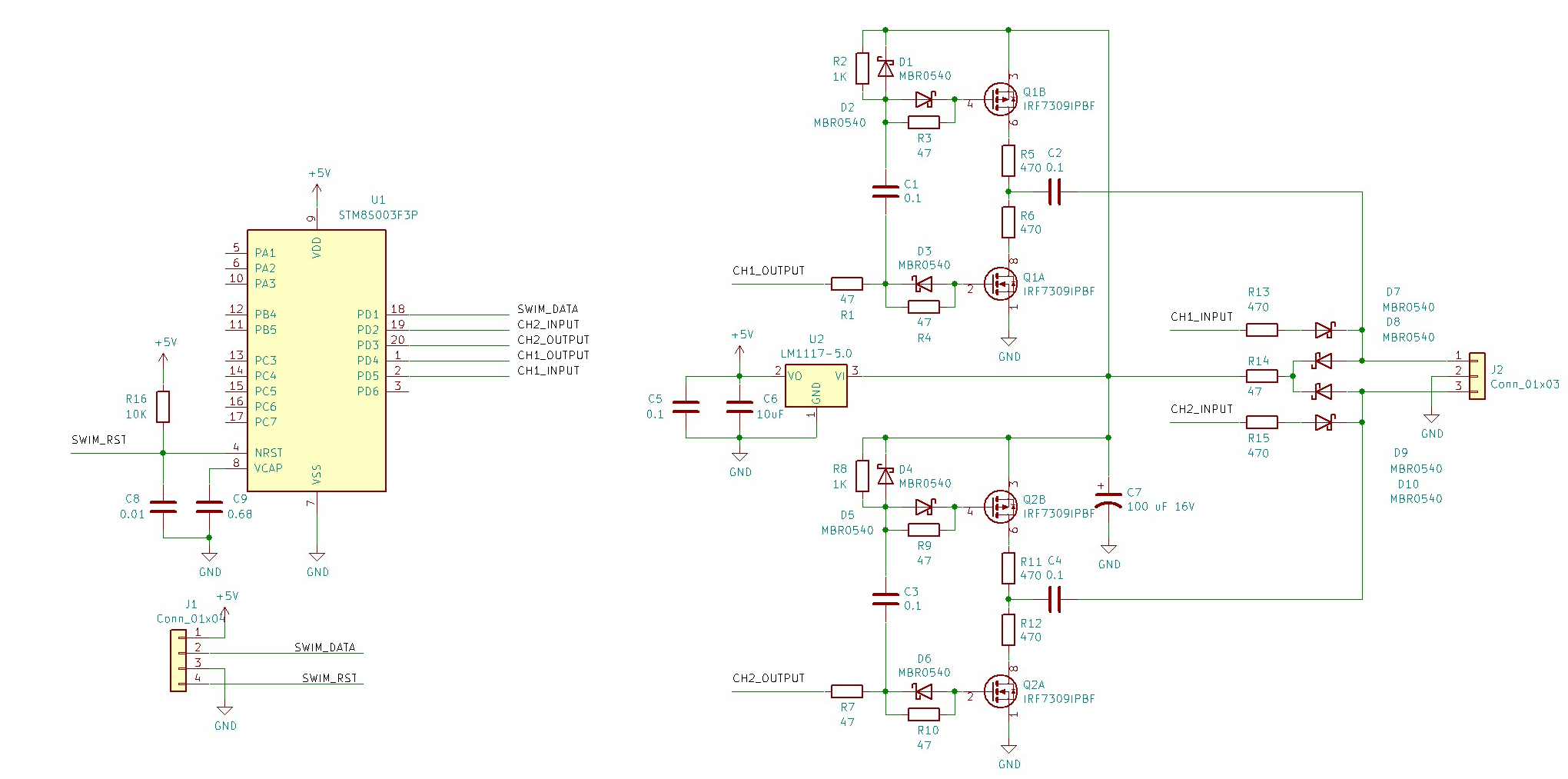 Debido a que no es fácil poner algo en paneles y cables en un automóvil, y nuestros amigos chinos (que Dios les conceda salud y fuerza en la lucha contra el virus) hacen tableros de manera tan fácil, rápida, conveniente y económica, fue diseñado y ordenado, en uno de los sitios famosos, el tablero.
Debido a que no es fácil poner algo en paneles y cables en un automóvil, y nuestros amigos chinos (que Dios les conceda salud y fuerza en la lucha contra el virus) hacen tableros de manera tan fácil, rápida, conveniente y económica, fue diseñado y ordenado, en uno de los sitios famosos, el tablero.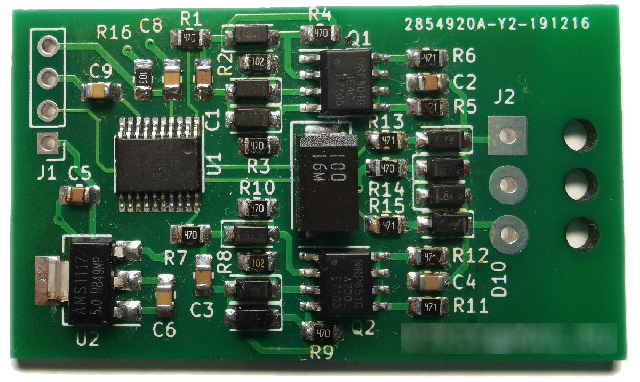 Ensamblado rápidamente a partir de materiales improvisados y por la noche se escribió un firmware simple que implementa la generación de eco a través de dos canales. En este punto, un lector atento preguntará: "¿Pero qué pasa con los requisitos para los componentes y el rendimiento de la electrónica automotriz?"Sí, no se respetan, aproveché al máximo lo que era posible en casa. ¿O no el máximo? ¿Su opinión? ¿Qué se podría hacer mejor?Aquí está el resultado del trabajo de este "simulador":
Ensamblado rápidamente a partir de materiales improvisados y por la noche se escribió un firmware simple que implementa la generación de eco a través de dos canales. En este punto, un lector atento preguntará: "¿Pero qué pasa con los requisitos para los componentes y el rendimiento de la electrónica automotriz?"Sí, no se respetan, aproveché al máximo lo que era posible en casa. ¿O no el máximo? ¿Su opinión? ¿Qué se podría hacer mejor?Aquí está el resultado del trabajo de este "simulador":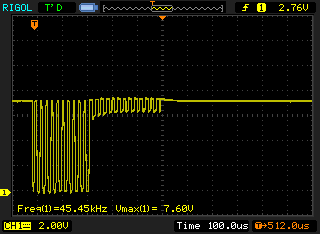 PD La unidad se calmó y ya no requiere que se conecten los sensores faltantes, y todo el conjunto está esperando los días cálidos para la instalación.
PD La unidad se calmó y ya no requiere que se conecten los sensores faltantes, y todo el conjunto está esperando los días cálidos para la instalación.Source: https://habr.com/ru/post/undefined/
All Articles