ROS: Dedicado a aquellos atrapados en Gazebo ... Plataforma para un robot por 28,000 rublos
Instrucciones de montaje de una plataforma robótica para estudiar ROS con una capacidad de carga de más de 30 kg.
ROS es un sistema metaoperativo (código abierto) para robots. Se ha convertido en un estándar de la industria. Con una interfaz de mensajería lista para usar entre diferentes nodos de su sistema y una gran cantidad de soluciones listas para varios componentes, es muy fácil construir su robot.Para ROS hay un entorno de simulador Gazebo, es decir. Puede programar el robot sin siquiera tenerlo físicamente. El primer contacto con ROS es una delicia para la mayoría, publica y lee temas, trata de manejar las tortugas. Y luego puede haber un problema con la transición a robots totalmente funcionales que interactúan con el entorno. Alguna parte va más allá y crea el robot necesario en el simulador. Muchos se quedan atrapados en la glorieta, les dedico esta publicación.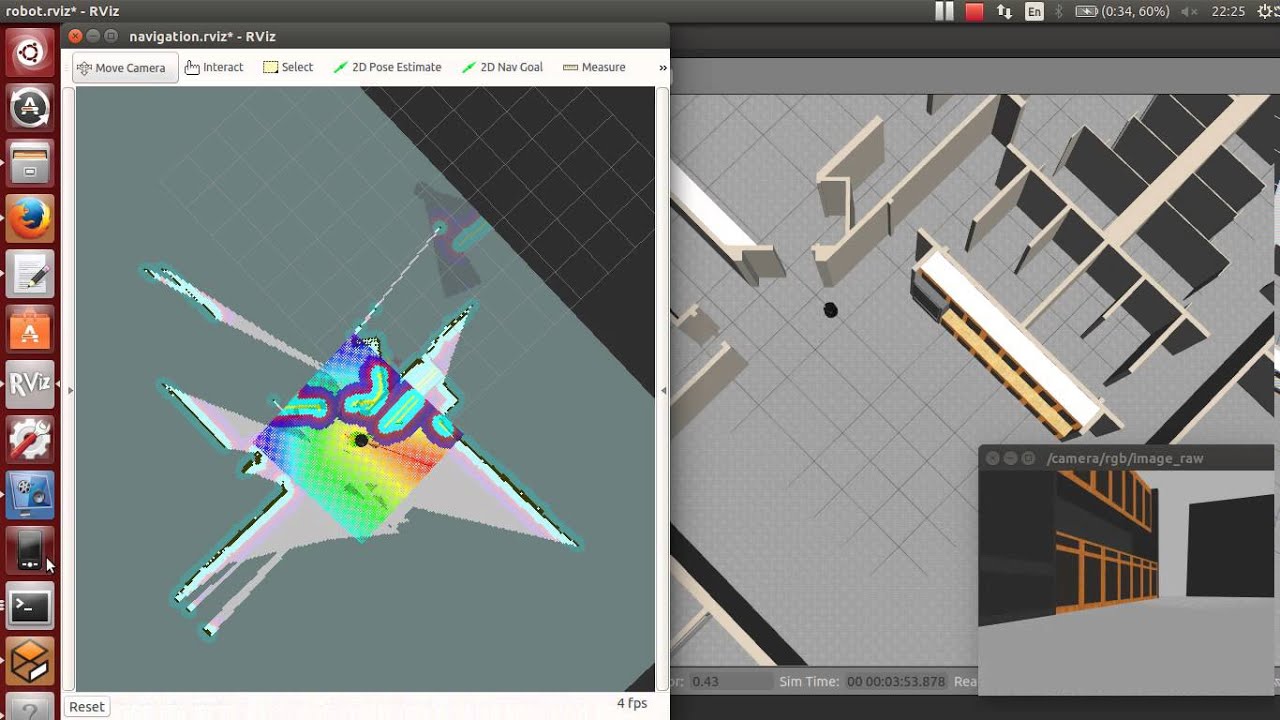 Después de publicar en habr.com sobre robots y robótica, los clientes me contactan con la necesidad de desarrollar soluciones robóticas. Una tarea interesante es organizar la navegación de los robots logísticos con la obtención de objetivos globales del sistema de gestión de almacenes (WMS) existente. El cliente mismo desarrolla la mecánica del camión, pero para trabajar en el software en paralelo, se requiere una plataforma que pueda simular el movimiento de mercancías. Además , probando los algoritmos de nuestro robot en las condiciones de un invierno duro y lluvioso, necesitábamos una plataforma interior. Compuesto los requisitos mínimos de equipo:
Después de publicar en habr.com sobre robots y robótica, los clientes me contactan con la necesidad de desarrollar soluciones robóticas. Una tarea interesante es organizar la navegación de los robots logísticos con la obtención de objetivos globales del sistema de gestión de almacenes (WMS) existente. El cliente mismo desarrolla la mecánica del camión, pero para trabajar en el software en paralelo, se requiere una plataforma que pueda simular el movimiento de mercancías. Además , probando los algoritmos de nuestro robot en las condiciones de un invierno duro y lluvioso, necesitábamos una plataforma interior. Compuesto los requisitos mínimos de equipo:- Plataforma con 2 ruedas.
- Capacidad de carga no inferior a 30 kg.
- Lidar RPlidar A1
- Computadora de placa única Raspberry Pi
- Mega Plataforma Arduino
- Sonar
El primer pensamiento fue utilizar una plataforma preparada. Apreciamos el mercado de soluciones ROS similares. TurtleBot3 Burger y el robot de Neato no nos convenían, porque Quería simular la entrega de cajas.Después de recopilar estos datos, se tomó una decisión decidida de construir una plataforma. Hemos reunido la plataforma de presupuesto máximo, publico instrucciones de ensamblaje, tal vez sea útil para alguien.Tamaño de la caja 320 * 620 * 195 mmEl cuerpo se fabricará mediante fresado CNC de un material compuesto. Quién necesita un archivo para cortar, escríbeme un correo electrónico al final de la publicación.Al cortar ranuras provistas para doblar lugares. Montaje en las esquinas.Las ruedas BLDC de 10 ', el controlador de la rueda, la batería y la carga se toman del giroscopio. Puede comprar uno nuevo para esto, en cualquier caso será más barato que las partes correspondientes por separado.Arreglamos las ruedas a la caja usando las piezas impresas https://www.thingiverse.com/thing:2990353La placa del giroscopio debe ser actualizada. Utilicé este firmwaregithub.com/NiklasFauth/hoverboard-firmware-hack , hay variaciones. Hay un compilador en línea en Internet.Como base para la navegación, utilizaremos la odometría de las ruedas y Rplidar A1.Como computadora, Raspberry Pi como una solución de presupuesto popular, estamos pensando en la versión con jetsoin nano.Como lidar requiere hasta 1A, Raspberry Pi hasta 2A, Arduino decidió suministrar un divisor USB con fuente de alimentación separada a través de un convertidor reductor de la batería principal.


 ROS Master se encuentra en una computadora separada, ya que planeamos agregar una cámara de sentido real.La mayoría de los nodos se ejecutan en la computadora maestra:
ROS Master se encuentra en una computadora separada, ya que planeamos agregar una cámara de sentido real.La mayoría de los nodos se ejecutan en la computadora maestra:- nodo para obtener las coordenadas del objetivo actual de la base
- alegría
- move_base
- amcl
- gmapping
Parte de los nodos en el móvil:- rosserial_arduino
- rplidar_ros
Este robot tiene todas las posibilidades de convertirse en un proyecto comercial separado.Todavía hay mucho trabajo:- necesita crear un modelo urdf
- desarrollar escenarios de uso de la plataforma
- considerar la compatibilidad con otros equipos
- configurar el trabajo de varios robots al mismo tiempo
Otras opciones de vivienda Si desea comprar este kit por el costo de los componentes o desea formar parte del proyecto y desarrollar este producto con nosotros, escríbame https://forms.yandex.ru/u/5e3d0be770f10402303acf87/Source: https://habr.com/ru/post/undefined/
All Articles