ROS: Dedicated to those stuck in Gazebo ... Platform for a robot for 28,000 rubles
Assembly instructions for a robotic platform for studying ROS with a carrying capacity of more than 30 kg
ROS is a meta-operating system (open source) for robots. It has become an industry standard. Having a ready-made messaging interface between different nodes of your system and a huge number of ready-made solutions for various components it is very easy to build your robot.For ROS there is a Gazebo simulator environment, i.e. You can program the robot without even having it physically. The first acquaintance with ROS is a delight for the majority, you publish and read topics, try to manage turtlesim. And then there may be a problem with the transition to fully functioning robots that interact with the environment. Some part goes further and creates the necessary robot in the simulator. Many get stuck in gazebo, I dedicate this post to them.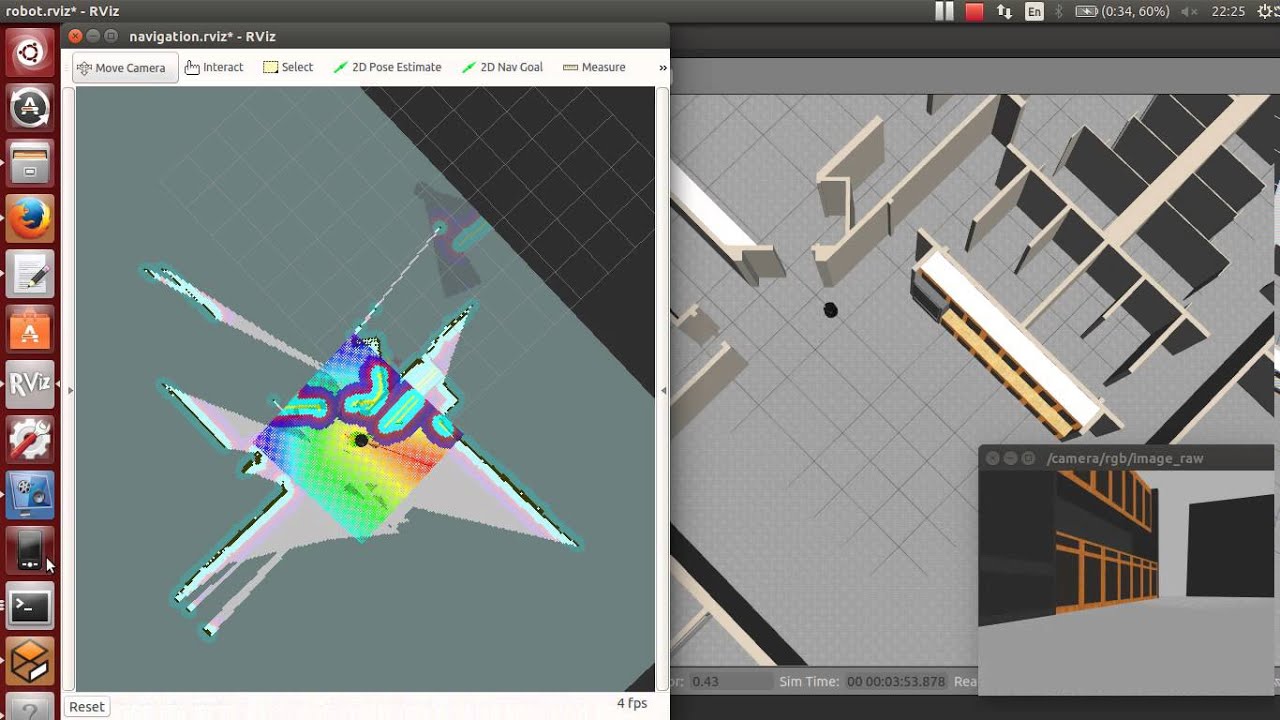 After publishing habr.com about robots and robotics, customers contact me with the need to develop robotic solutions. An interesting task is to organize the navigation of logistics robots with obtaining global goals from the existing warehouse management system (WMS). The customer himself develops the mechanics of the cart, but in order to work on the software in parallel, a platform is required that can simulate the movement of goods. In addition , testing the algorithms of our robot in the conditions of a harsh and rainy winter, we needed an indoor platform. Made up the minimum equipment requirements:
After publishing habr.com about robots and robotics, customers contact me with the need to develop robotic solutions. An interesting task is to organize the navigation of logistics robots with obtaining global goals from the existing warehouse management system (WMS). The customer himself develops the mechanics of the cart, but in order to work on the software in parallel, a platform is required that can simulate the movement of goods. In addition , testing the algorithms of our robot in the conditions of a harsh and rainy winter, we needed an indoor platform. Made up the minimum equipment requirements:- Platform with 2 wheels
- Carrying capacity not less than 30 kg.
- Lidar RPlidar A1
- Raspberry Pi Single Board Computer
- Arduino Mega Platform
- Sonar
The first thought was to use a ready-made platform. We appreciated the market for similar ROS solutions. TurtleBot3 Burger and the robot on Neato did not suit us, because wanted to simulate the delivery of boxes.After collecting this data, a strong-willed decision was made to build a platform. We have put together the maximum budget platform, I post assembly instructions, maybe it will come in handy for someone.Case size 320 * 620 * 195mmThe body will be manufactured by CNC milling of a composite material. Who needs a file for cutting, write me an e-mail at the end of the post.When cutting provided slots for bending places. Assembly on the corners.BLDC 10 'wheels, wheel driver, battery and charging take from the gyroscope. You can buy a new one for this, in any case it will be cheaper than the corresponding parts separately.We fix the wheels to the case using the printed parts https://www.thingiverse.com/thing:2990353The gyroscope board needs to be reflashed. I used this firmwaregithub.com/NiklasFauth/hoverboard-firmware-hack , there are variations. There is an online compiler on the Internet.As a basis for navigation, we will use odometry from the wheels and Rplidar A1.As a computer, Raspberry Pi as a popular budget solution, we are thinking about the version with jetsoin nano.Since lidar requires up to 1A, Raspberry Pi up to 2A, Arduino decided to supply a USB splitter with separate power supply through a step-down converter from the main battery.


 ROS Master is located on a separate computer, as we plan to add a realsense camera.Most nodes are running on the master computer:
ROS Master is located on a separate computer, as we plan to add a realsense camera.Most nodes are running on the master computer:- node to obtain the coordinates of the current target from the base
- joy
- move_base
- amcl
- gmapping
Part of the nodes on the rover:- rosserial_arduino
- rplidar_ros
This robot has every chance of becoming a separate commercial project.There is still a lot of work:- need to create a urdf model
- develop platform usage scenarios
- consider compatibility with other equipment
- configure the work of several robots at the same time
If you want to purchase this kit for the cost of components or want to become part of the project and develop this product with us write me https://forms.yandex.ru/u/5e3d0be770f10402303acf87/Source: https://habr.com/ru/post/undefined/
All Articles