 polargraph.co.ukSie sagen, dass Russen lange Zeit nutzen, aber schnell gehen. Die Idee, einen halben Absatz zu sammeln, kam mir vor 5 Jahren, nachdem ich einen Artikel über einen Player auf Diskettenlaufwerken gelesen hatte. Zuerst fand ich einen Drawbot auf Diskette und dann einen halben Absatz. Fragen Sie nicht, wie die Beziehung dazu ist, es ist nicht. Meistens wurde das Handbuch mit Anweisungen verwendet .
polargraph.co.ukSie sagen, dass Russen lange Zeit nutzen, aber schnell gehen. Die Idee, einen halben Absatz zu sammeln, kam mir vor 5 Jahren, nachdem ich einen Artikel über einen Player auf Diskettenlaufwerken gelesen hatte. Zuerst fand ich einen Drawbot auf Diskette und dann einen halben Absatz. Fragen Sie nicht, wie die Beziehung dazu ist, es ist nicht. Meistens wurde das Handbuch mit Anweisungen verwendet .Zubehör
- Arduino uno
- Motorsaield-Motortreiber von AdaFruit. Ich hatte einen Motor Drive Shield L293D für Arduino / Wze.
- 2 Schrittmotoren NEMA-17. Ich habe den Hybrid-Schrittmotor 42BYGH202 / Wze verwendet.

- AC / DC-Stromversorgung
- Gondel. Ich habe es von einem Plattenständer gemacht, ich muss zwei Löcher für die Befestigung der Kabel machen und das dritte für die Last.

instruables.com - Fahrgestell von Spulen aus der Nähmaschine (es gibt eine Lücke zwischen der Spule und der Achse des Motors, ich habe ein Stück Gummi gelegt). Verwenden Sie lieber eine Angelschnur als einen Faden.
- Die Oberfläche, auf der die Motoren montiert sind. Je mehr desto besser. Der Autor mit den Lehrmitteln verwendete Motorhalterungen (Klammern), ich habe sie gerade an dem Karton befestigt, den ich auf das A2-Tablet geklebt habe.
Arduino
Installieren Sie die neueste Version der Arduino IDE (die alte kann den Code nicht laden). Legen Sie den Pfad zum Ordner mit den Skizzen (/ sketches /) fest: Datei -> Einstellungen -> Speicherort des Skizzenordners.Laden Sie den Code vom Euphy Github herunter .Packen Sie das Archiv aus. Kopieren Sie die Adafruit- und AccelStepper-Bibliotheken in den Ordner / sketches / library /, den Ordner polargraph_server_a1 in den Ordner / sketches /.Starten Sie die Arduino IDE. Datei -> Ordner mit Skizzen -> polargraph_server_a1. Wir kompilieren, laden auf das Board.Schrittmotoren
Über Schrittmotoren gibt es einen wunderbaren Artikel über Habr. Durch Versuch und Irrtum habe ich sie an die Platine angeschlossen: den linken Motor - an die Klemmen M1, M2, den rechten - M3, M4.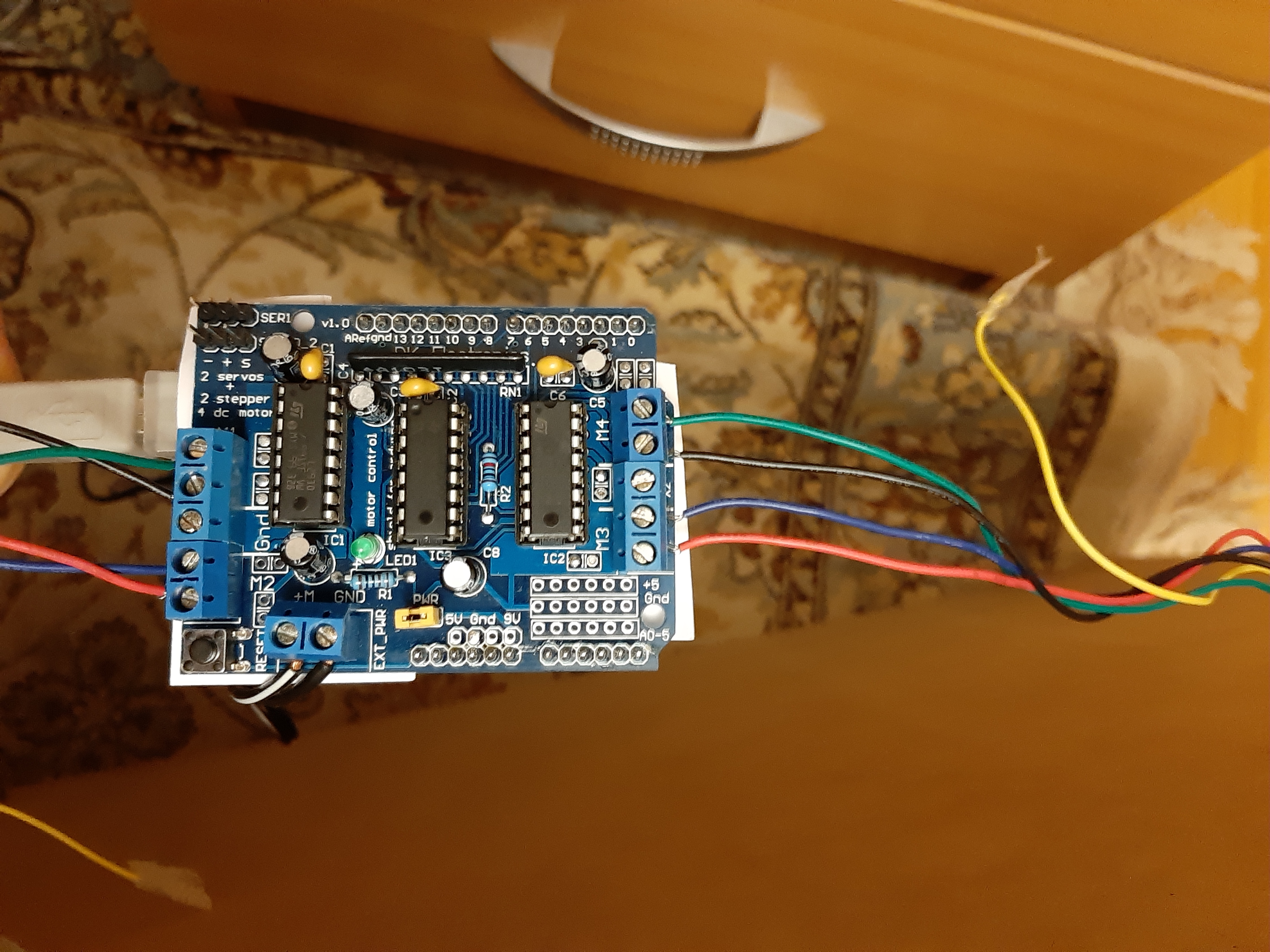
Software Installation
Entpacken Sie aus dem zuvor heruntergeladenen euphy-Archiv den Ordner / controller /. Geben Sie in derDatei default.properties.txt die erforderlichen Abmessungen an: Breite und Länge der Maschine, Breite und Länge des Blattes, Startpunkt. Sie müssen sehr genau auf den Millimeter genau gemessen werden, da sonst das Bild verzerrt wird. Ich werde unten ein Beispiel zeigen, es hat sich so herausgestellt. instrukte.com
Starten Sie die Anwendung: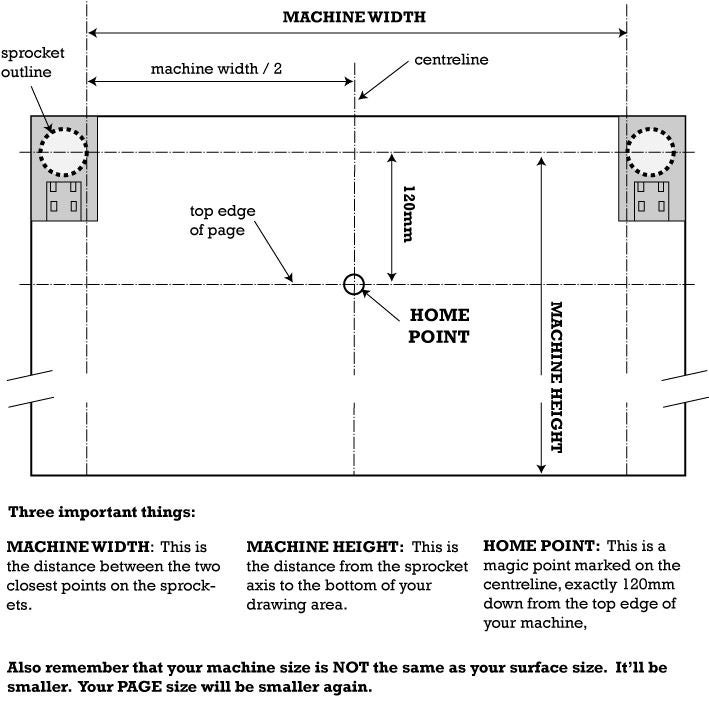
sudo chmod +x polargraphcontroller
./polargraphcontroller
 Wählen Sie auf der Registerkarte SETUP den gewünschten Port (SERIAL PORT) aus. Oben sollte eine grüne Inschrift erscheinen, damit der Poshraf fertig ist. Stellen Sie die Gondel auf den Punkt HOME POINT.Wählen Sie auf der Registerkarte EINGABE die Option BILD LADEN. Laden Sie das Bild hoch und ändern Sie gegebenenfalls die Größe (RESIZE IMAGE). Verschieben Sie das Bild (MOVE IMAGE) in den Blattbereich, wählen Sie das gewünschte Fragment (SELECT AREA) aus, verringern Sie gegebenenfalls die Rastergröße und drücken Sie RENDER PIXELS. Im Popup-Fenster müssen Sie auswählen, wo das Zeichnen (OBEN RECHTS) und der Stil (VARIABLE SIZE SQUARE WAVE) beginnen sollen.
Wählen Sie auf der Registerkarte SETUP den gewünschten Port (SERIAL PORT) aus. Oben sollte eine grüne Inschrift erscheinen, damit der Poshraf fertig ist. Stellen Sie die Gondel auf den Punkt HOME POINT.Wählen Sie auf der Registerkarte EINGABE die Option BILD LADEN. Laden Sie das Bild hoch und ändern Sie gegebenenfalls die Größe (RESIZE IMAGE). Verschieben Sie das Bild (MOVE IMAGE) in den Blattbereich, wählen Sie das gewünschte Fragment (SELECT AREA) aus, verringern Sie gegebenenfalls die Rastergröße und drücken Sie RENDER PIXELS. Im Popup-Fenster müssen Sie auswählen, wo das Zeichnen (OBEN RECHTS) und der Stil (VARIABLE SIZE SQUARE WAVE) beginnen sollen. Klicken Sie rechts zum Starten der Befehlswarteschlange auf die rote Beschriftung (wird grün): ommandQueue: QUEUE RUNNING.Ich brauchte ungefähr eine Stunde, um die Inschrift zu zeichnen. Gekritzel oben rechts, weil ich zuerst den SCRIBBLE-Stil gewählt habe. Die Komprimierung der Y-Achse ist aufgrund ungenauer Messungen sichtbar.
Klicken Sie rechts zum Starten der Befehlswarteschlange auf die rote Beschriftung (wird grün): ommandQueue: QUEUE RUNNING.Ich brauchte ungefähr eine Stunde, um die Inschrift zu zeichnen. Gekritzel oben rechts, weil ich zuerst den SCRIBBLE-Stil gewählt habe. Die Komprimierung der Y-Achse ist aufgrund ungenauer Messungen sichtbar. Die Geschwindigkeit des Polargraphen.
Die Geschwindigkeit des Polargraphen.