Wir untersuchen weiterhin die Fuzzy-Logik gemäß dem Buch von V. Gostev, „Fuzzy-Steuerungen in automatischen Steuerungssystemen“. Nachdem wir die schöne Aussicht auf die Reaktionsflächen genossen haben , lösen wir direkt das nächste Problem aus V. Gostevs Buch "Fuzzy Controllers in Automatic Control Systems".
Dieser Text ist eine Fortsetzung früherer Veröffentlichungen:
- Eine einfache Steuerung basierend auf Fuzzy-Logik. Erstellung und Anpassung.
- Fuzzy-Logik in schönen Bildern. Antwortflächen für verschiedene Zugehörigkeitsfunktionen.
- Erstellen eines Controllers basierend auf Fuzzy-Logik mit Mehrkanaleinstellungen.
- Einfache Fuzzy-Logik wird „aus dem, was war“ für ein Gasturbinentriebwerk geformt.
- Fuzzy-Logik gegen PID. Wir überqueren den Igel und die Schlange. Algorithmen zur Steuerung von Flugzeugtriebwerken und KKW.
Für diejenigen, die mit Fuzzy-Logik nicht vertraut sind, empfehle ich, zuerst den ersten Text zu lesen. Danach ist alles, was unten beschrieben wird, einfach und klar.
, - . , . , Fuzzy. , , . , , , , .
, , , .
– -, (). , , « . »
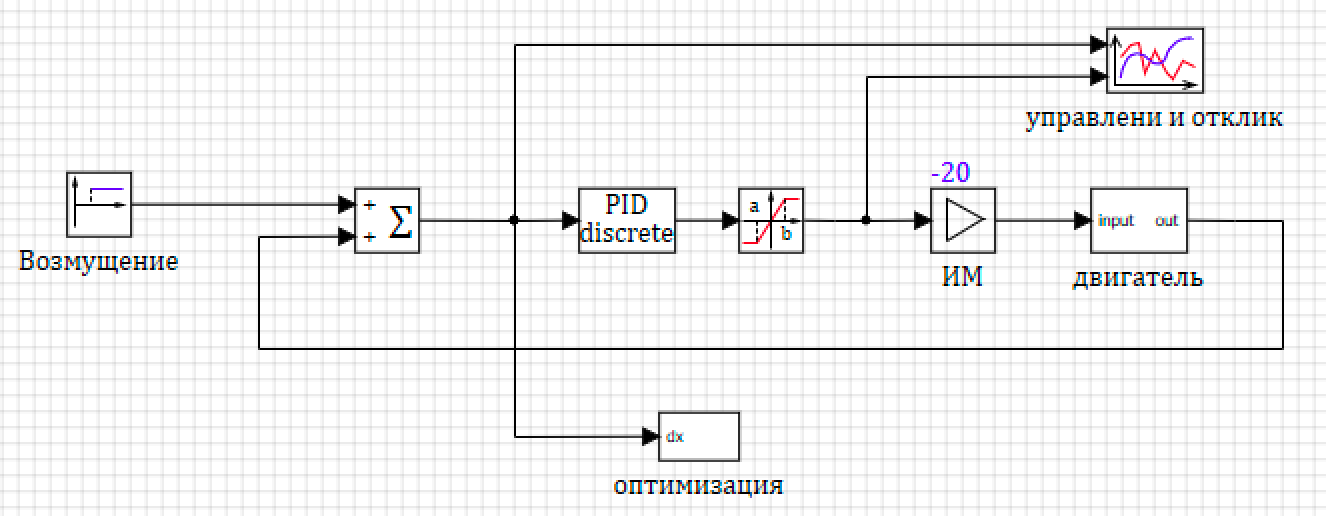
, , , 1 ( ).
1. .
.
. 1 . , . – , .
: – , – . , 0.009 .
, -.
, 2. – 20, (- «as is» .. ).
2. .
- 0.001 0.001.
- 1,1,1 . 3.
, , 1 1000, 0,001. , . , -1 1 , 0 7 .
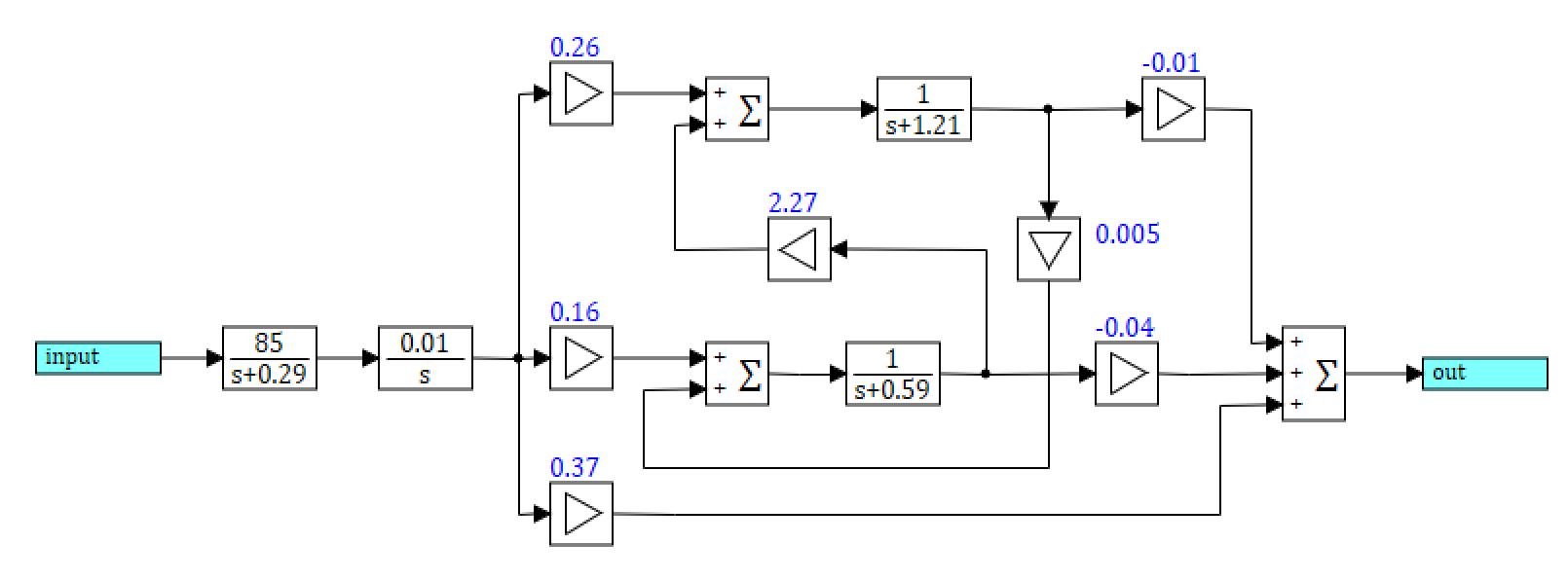
Was können Sie anhand dieser Tabelle sagen? Nichts. Und das alles, weil unser Modell bereits als Übertragungsfunktion in Abweichungen dargestellt wird und wir nicht sagen können, ob es schnell ist oder nicht. Über den Motor können wir nichts sagen. Wie ich bereits im Artikel „Technologie zum Erhalten dynamischer TAU-Gleichungen“ gezeigt habe . Und warum ist Systemidentifikation scheiße und Regeln der „ehrlichen Physik“ : Die Umwandlung eines parametrischen physikalischen Systems in eine Art Übertragungsfunktion ruiniert die gesamte technische „Verständlichkeit“ des Modells.Ist beispielsweise die Auswirkung auf ein Modell mit einem Wert von 1000 nach PID im Leben möglich? Unbekannt Wenn es sich um eine Kraftstoffversorgung handelt, ist es offensichtlich, dass das Versorgungssystem nicht in der Lage ist, 1000-mal mehr Kraftstoff als im Leerlauf zu stopfen., 10, -10. . , . :

4. .
, , ( 5). 1000, , 10.
5. .
.
C . 0
6. .
7.
 7. ..
7. ... :
— – , 0.009.
— .
«-3» . , , , — .
« » .
, , . , .
, « » , , .. .
, , . , .
, . , , , .
8.

8. .
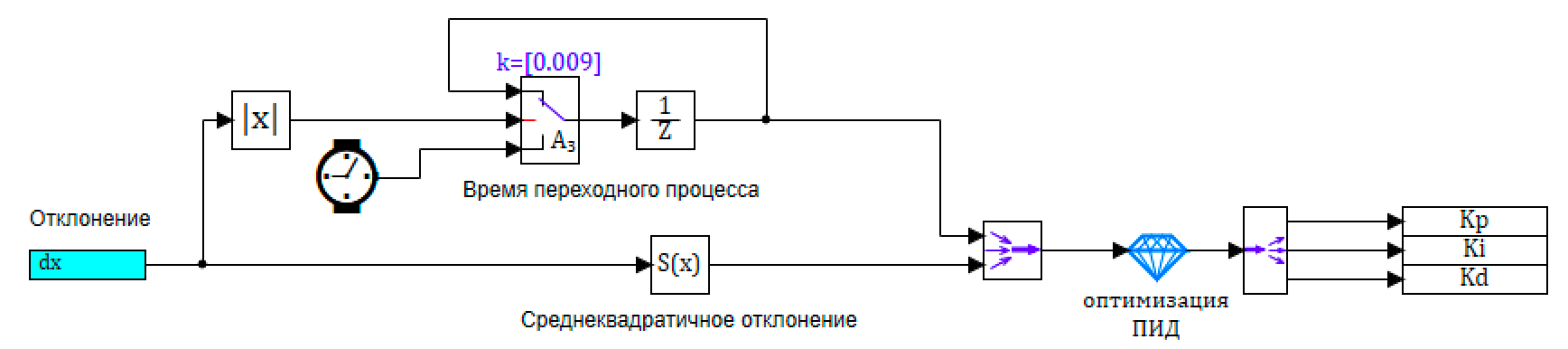
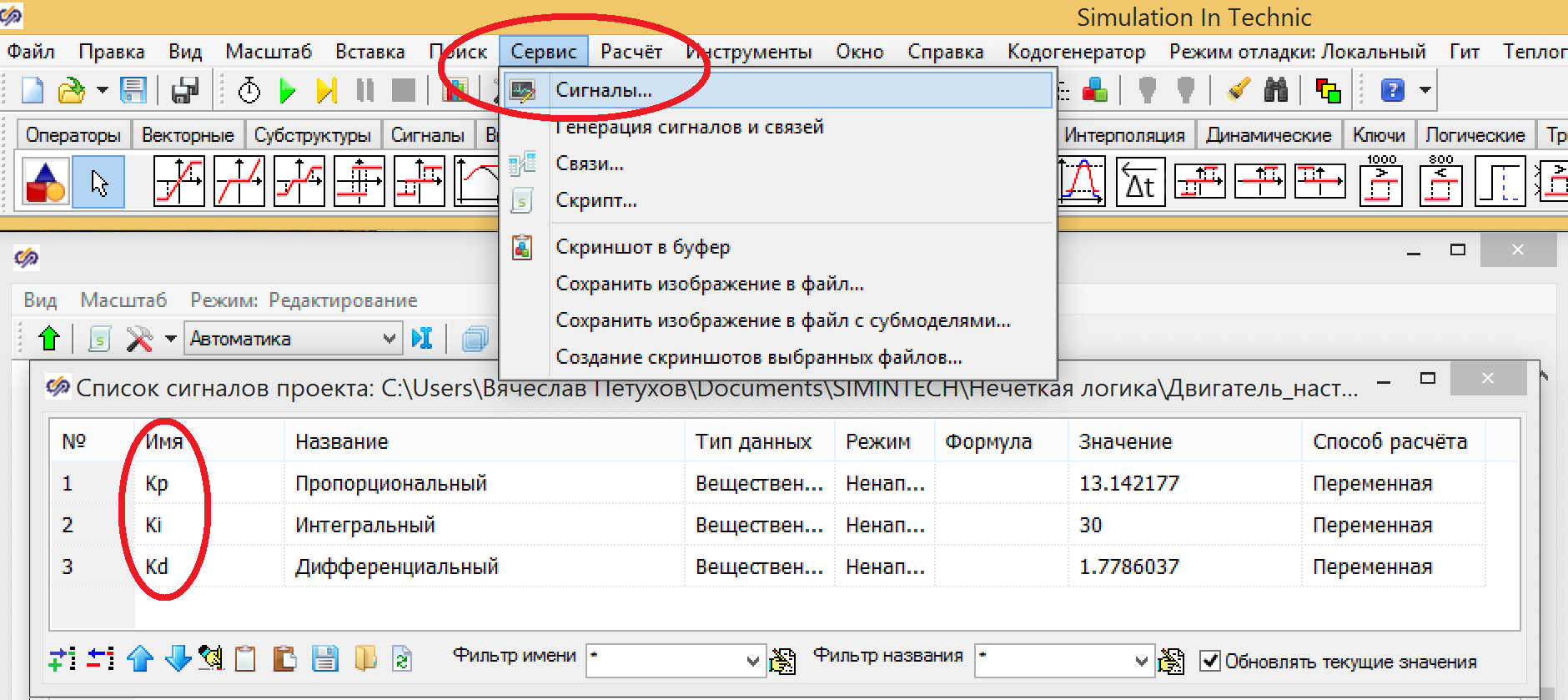
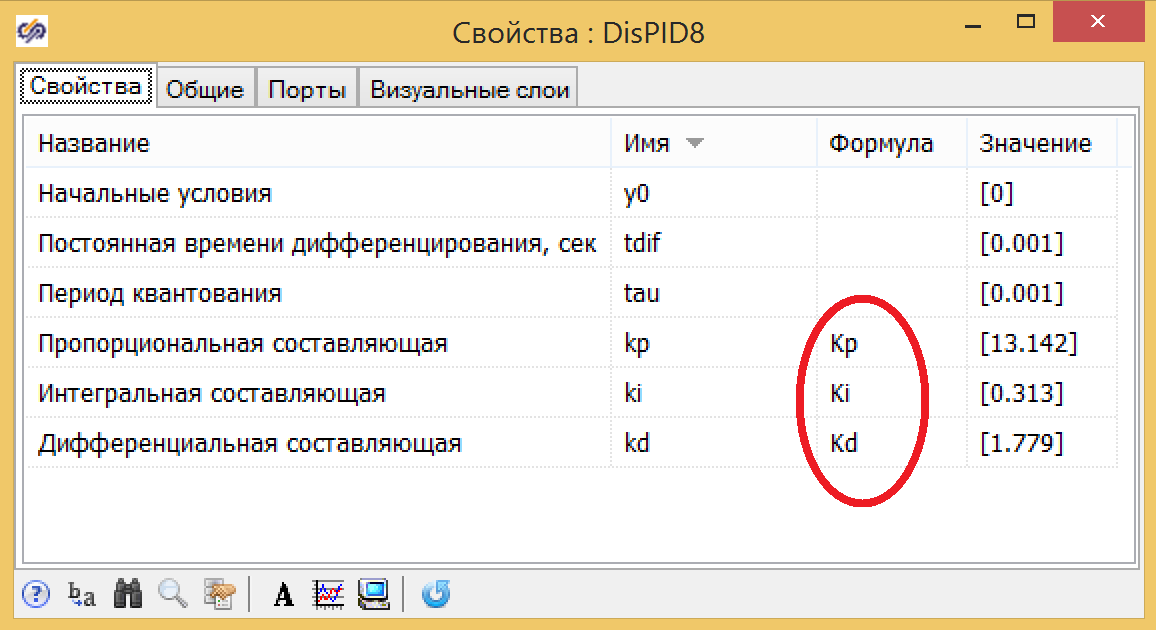
. , , . p, Ki, Kd (. . 7 . 8). -. (. 10.)
9. .
10. -.
:
Kp = 13.142
Ki = 0.313
Kd = 1.779
0.72 . 11.

11. -.
, .
1 , . .
Die eingehenden Abweichungssignale und die Variationsrate der Abweichung, die durch die Phaseneinheiten laufen, werden jeweils in drei Terme zerlegt. Verwenden der Gauß-Zugehörigkeitsfunktionen.
Abweichung - mehr , Norm , weniger .Die Änderungsrate wird wachsen , nicht ändert , fallen .Der Regler wirkt sich aus, wenn eine Abweichung auftritt und wenn die Änderungsrate des Reglers anzeigt, dass die Abweichung zunimmt (auch wenn sie momentan normal ist). Grundregeln für die Regulierungsbehörde:
- ( (0) ), .
- , 0.
- ( (0) ), .
, , 12.

12. Fuzzy Logic.
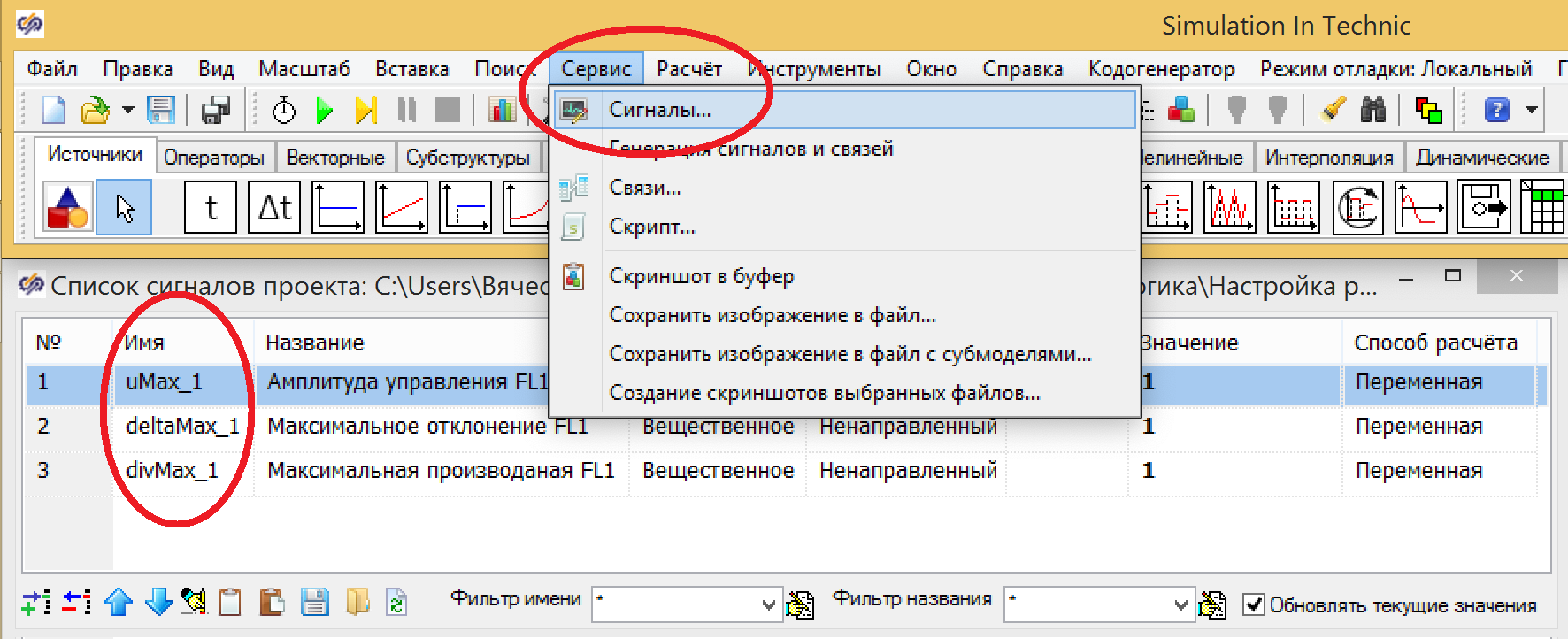
. , 0, . :
- uMax_1 – ;
- deltaMax_1 – ;
- divMax_1 – .
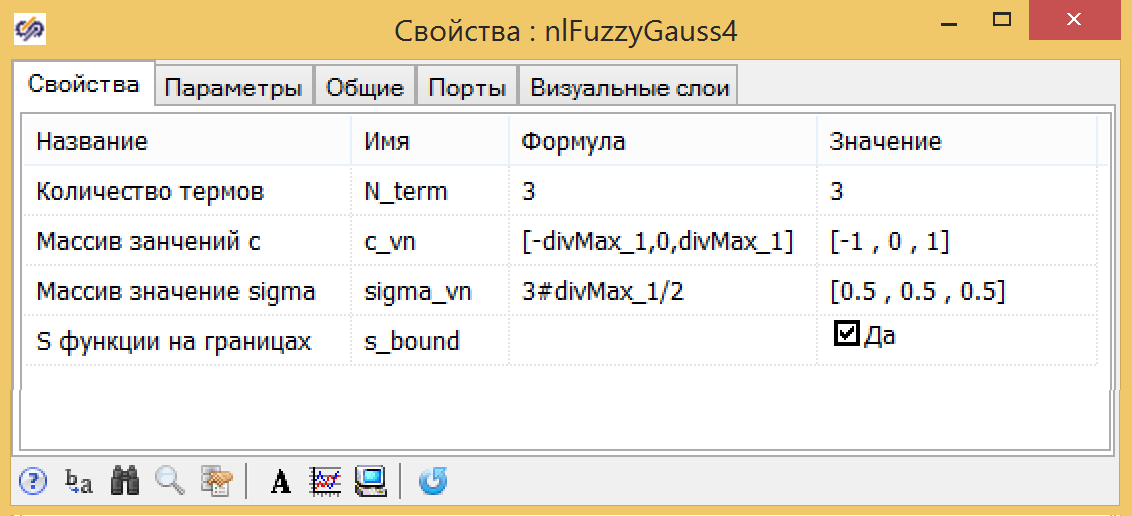
– . 13.
13. .
(–uMax_1… uMax_1) [–uMax_1 ,0, uMax_1], , 2. (. , ).
, :
 14. .
14. ..
, :
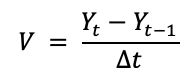 wobei:Y t der aktuelle Wert ist;Y t-1 ist der Wert im vorherigen Schritt;Δt = 0,001 - Zeitschritt ist der gleiche wie beim Abtasten eines diskreten PID-Reglers.
wobei:Y t der aktuelle Wert ist;Y t-1 ist der Wert im vorherigen Schritt;Δt = 0,001 - Zeitschritt ist der gleiche wie beim Abtasten eines diskreten PID-Reglers.Die Schaltung ist in Abbildung 15 dargestellt. Die Division durch Δt wird im Vergleichsblock berücksichtigt, in dem die Koeffizienten für jeden Eingang eingestellt werden können.
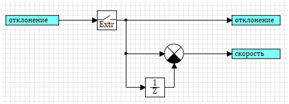
Abbildung 16. Schema zur Berechnung der Änderungsrate.
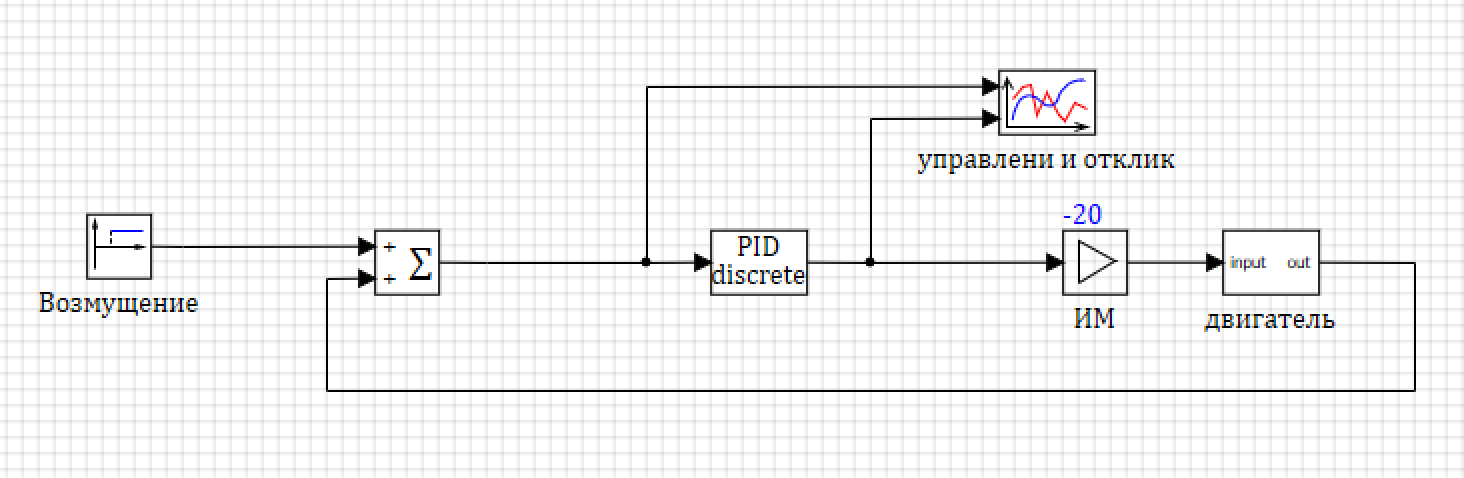
Da der gesamte Stromkreis für uns bereit ist, muss der PID-Regler durch den FL-Regler ersetzt werden (siehe Abbildung 17) und sehen, was passiert.
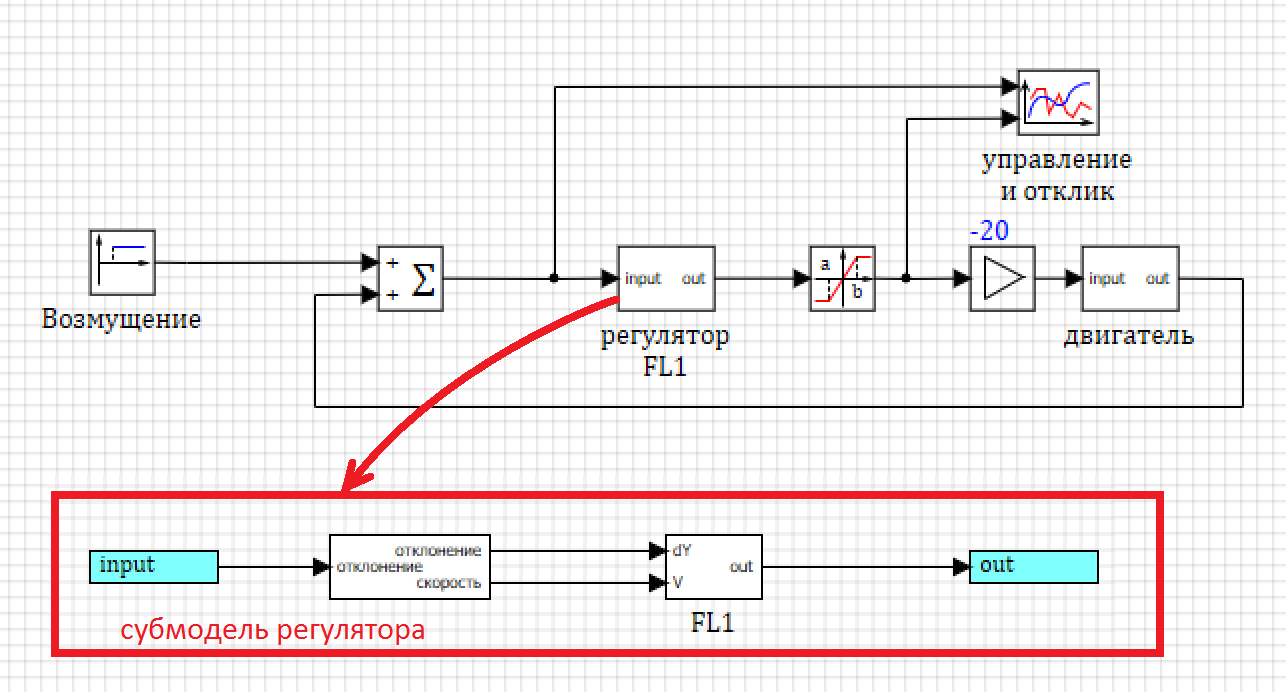
Abbildung 17. Diagramm eines Modells mit einem Fuzzy-Controller.
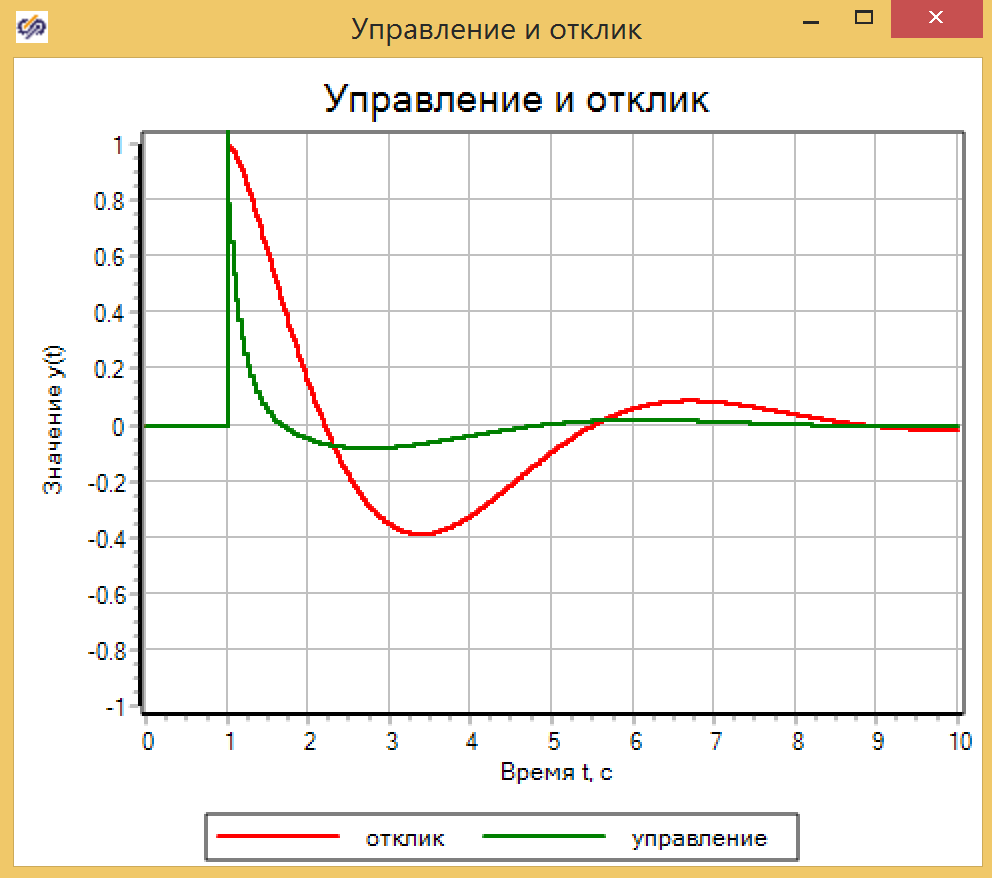
Zu meiner großen Überraschung schnitt der Fuzzy-Regler in den ersten Einzeleinstellungen besser ab als die PID. Es wird eine Art kontinuierliche Werbung für Fuzzy-Logik erhalten.
Wenn es in früheren Fällen auf die Tatsache zurückgeführt werden könnte, dass die zweite Ableitung im Fuzzy-Regler verwendet wird, dann verwendet dieser Fuzzy-Regler in diesem Fall dieselbe Ableitung, und die PID verwendet auch die integrale Komponente.
Damit Befürworter der Geschlechterdiversität mich nicht beschuldigen, traditionelle PID-Regulatoren zu unterdrücken, wird der Koeffizient der integralen Komponente aufgehoben und ein PD-Regler erhalten. Das Ergebnis hat sich deutlich verbessert, aber FL ist immer noch besser.
Abbildung 19. PD-Controller mit einzelnen Einstellungen.
, 0.009. :
– 11.25 .
— 5.25 .
FL – 4.74 .
FL
, - (. 6). :
— uMax_1 – ;
— deltaMax_1 – ;
— divMax_1 – .
1. .
, .
20. .
, , .
. .
 21. .
21. .0.24
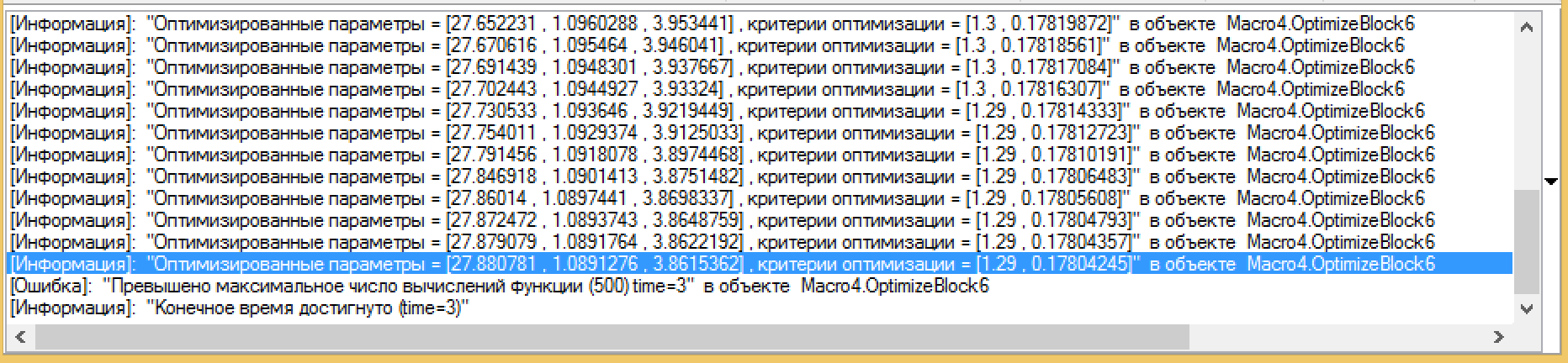
[]: « = [31.10359, 1.0219553, 2.165446], = [1.24, 0.09879439]» Macro4.OptimizeBlock6
0.23 .
[]: « = [34.954824, 1.0114662, 0.058949452], = [1.23, 0.098544697]» Macro4.OptimizeBlock6
FL 22. , .
, .
, . . , , , .
, , , .
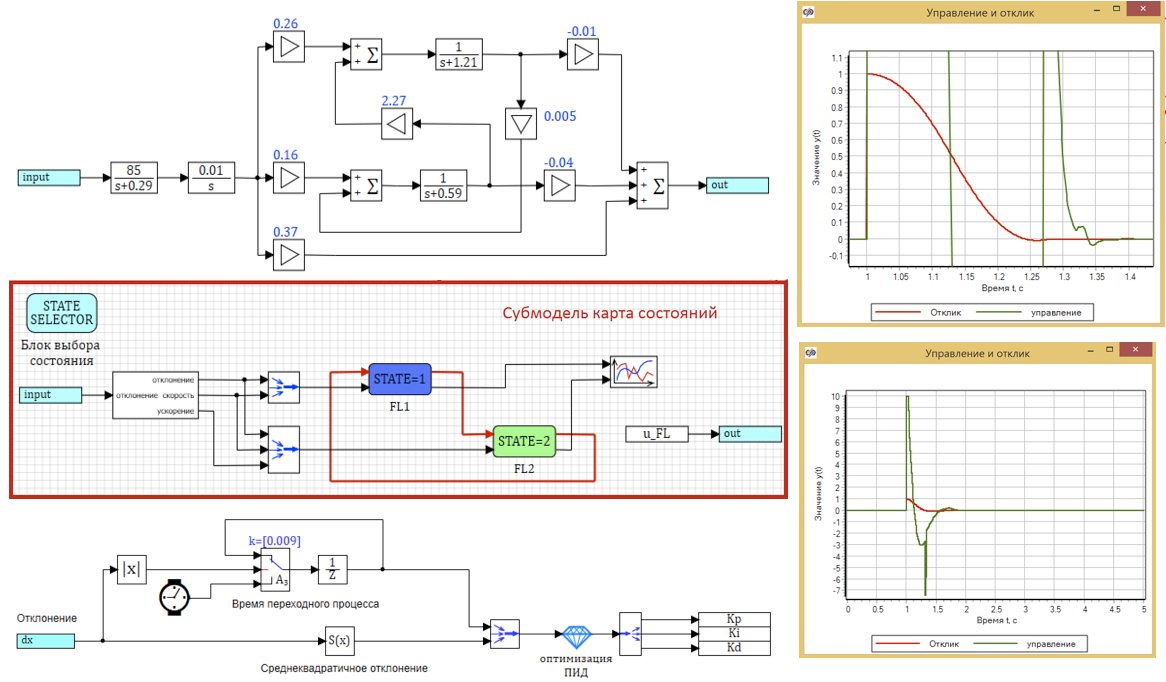
. – SimInTech, - , .
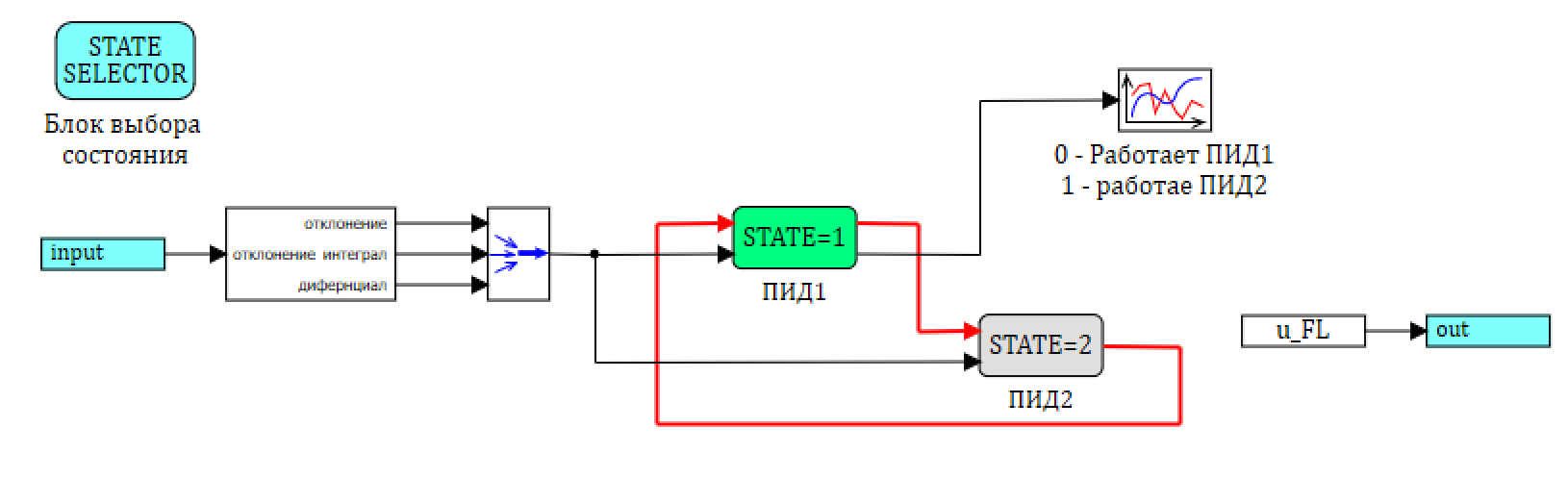
. . – FL1, — FL2. , 23:
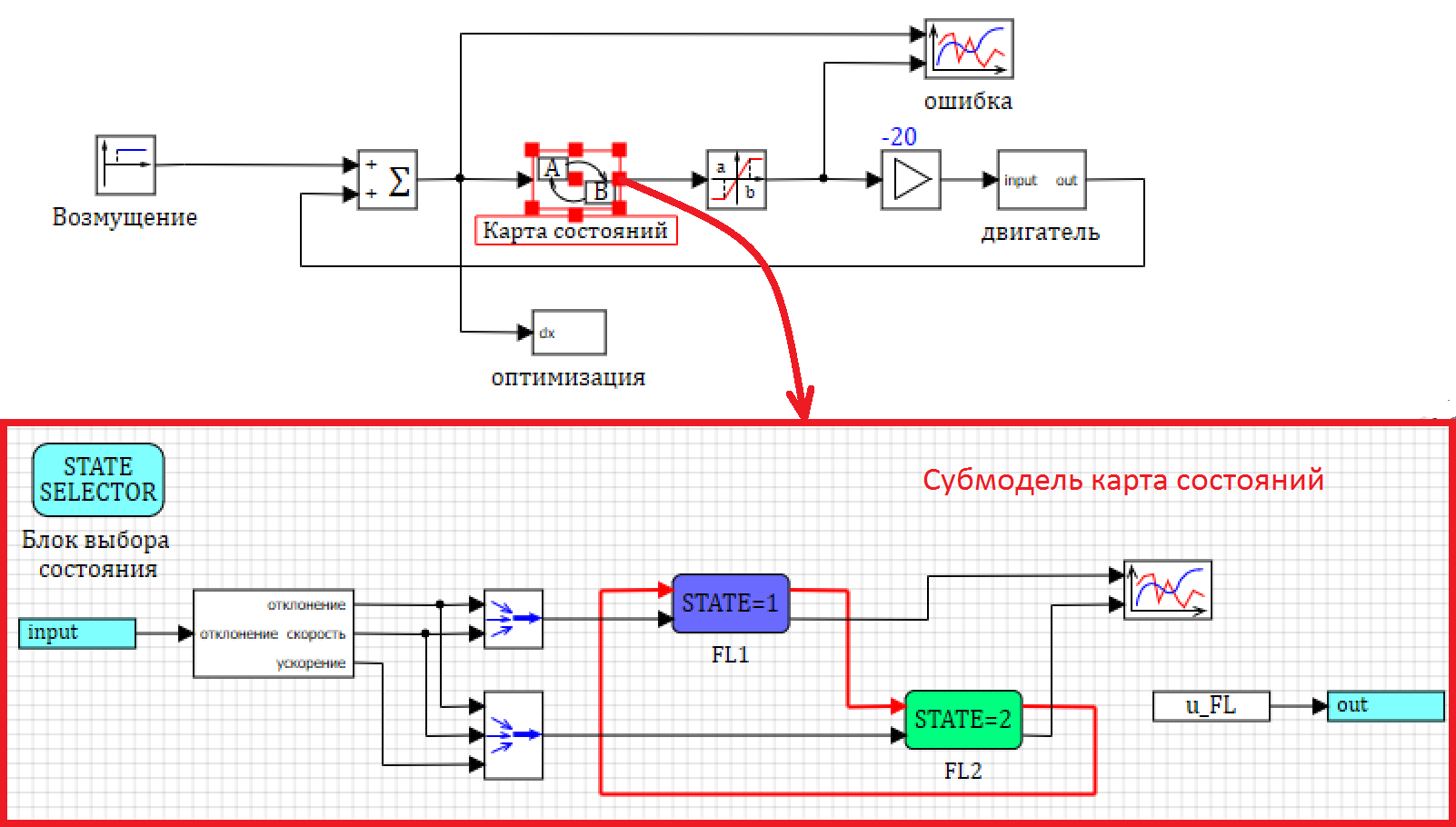
23. .
, , – , .
, .
, , , , . .
, , , «1 », , 0.001 ( ). . — .
, , , (), . , , 1000 , 1 000 000 . . . 24.
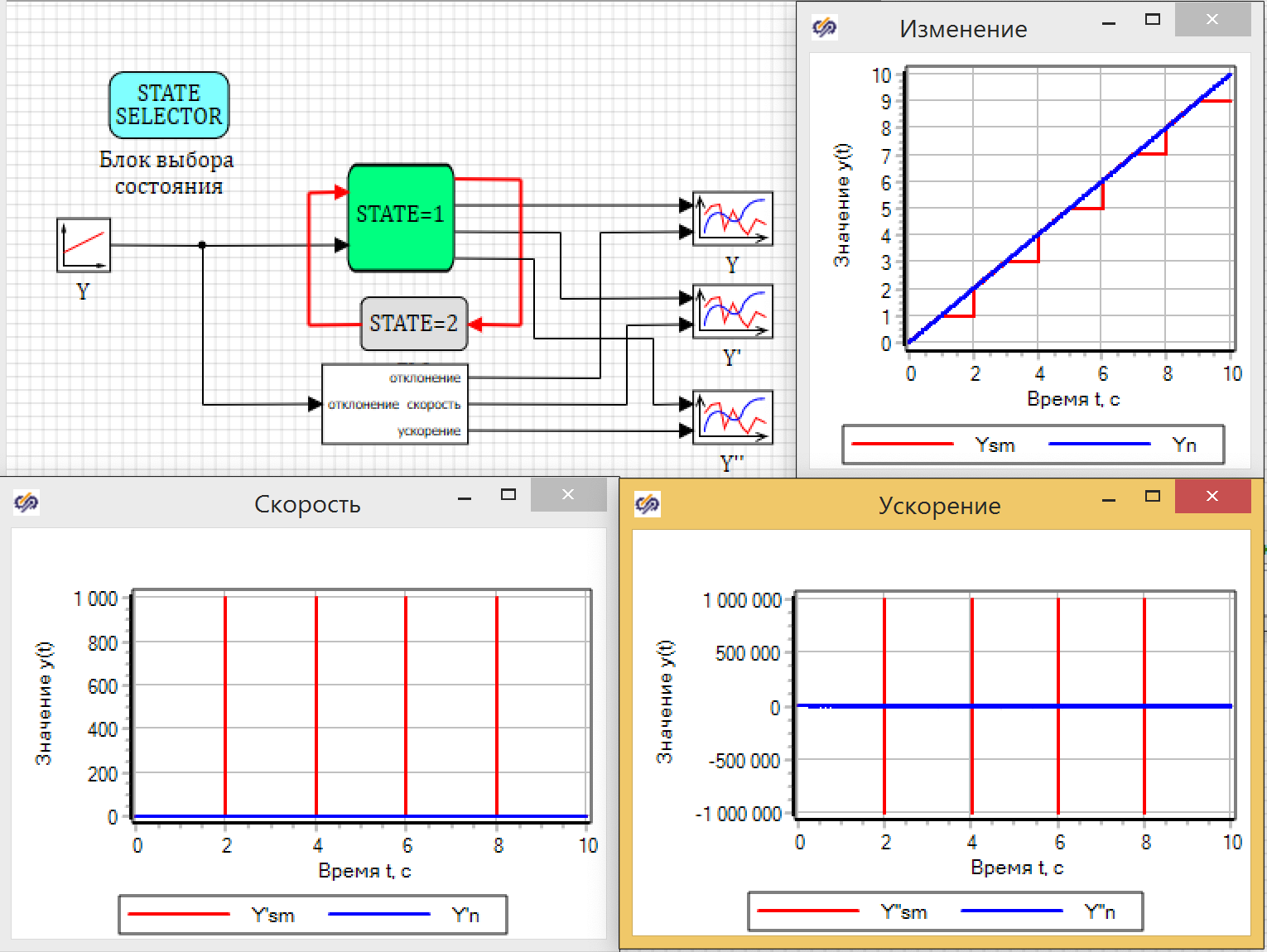
24. .
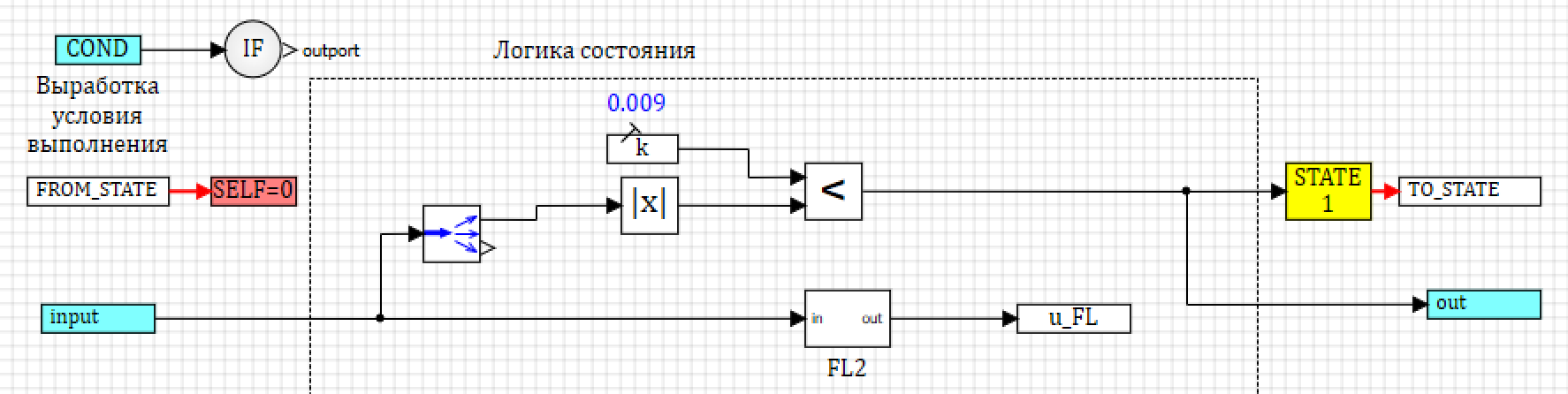
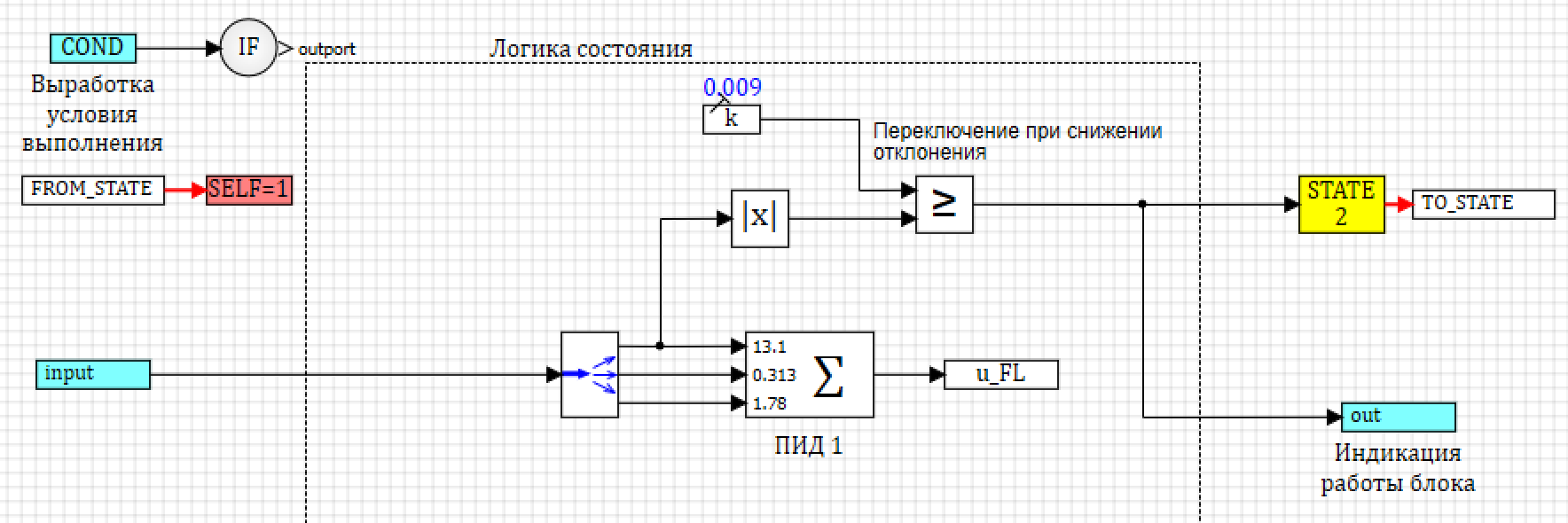
: , 0.009. , , .
FL1, . , u_FL. , , .

25. 1.
– , 1 , 0.009.
 26. 2.
26. 2.( .. ). 24.
, , u_FL FL1, FL2 .
. , . , . , , .
– , , .
– , , .
— , , .
, :
1) Wenn die Abweichung größer ist und die Änderungsrate zunimmt und die Beschleunigung der Änderung beschleunigt wird , wird der Effekt verringert .2) Wenn die Abweichung normal ist und die Änderungsrate konstant ist und sich die Beschleunigung der Änderung nicht ändert , ändert sich der Effekt nicht .3) Wenn die Abweichung geringer ist und die Änderungsrate abnimmt und die Beschleunigung der Änderung langsamer wird , dann Auswirkungen erhöhen .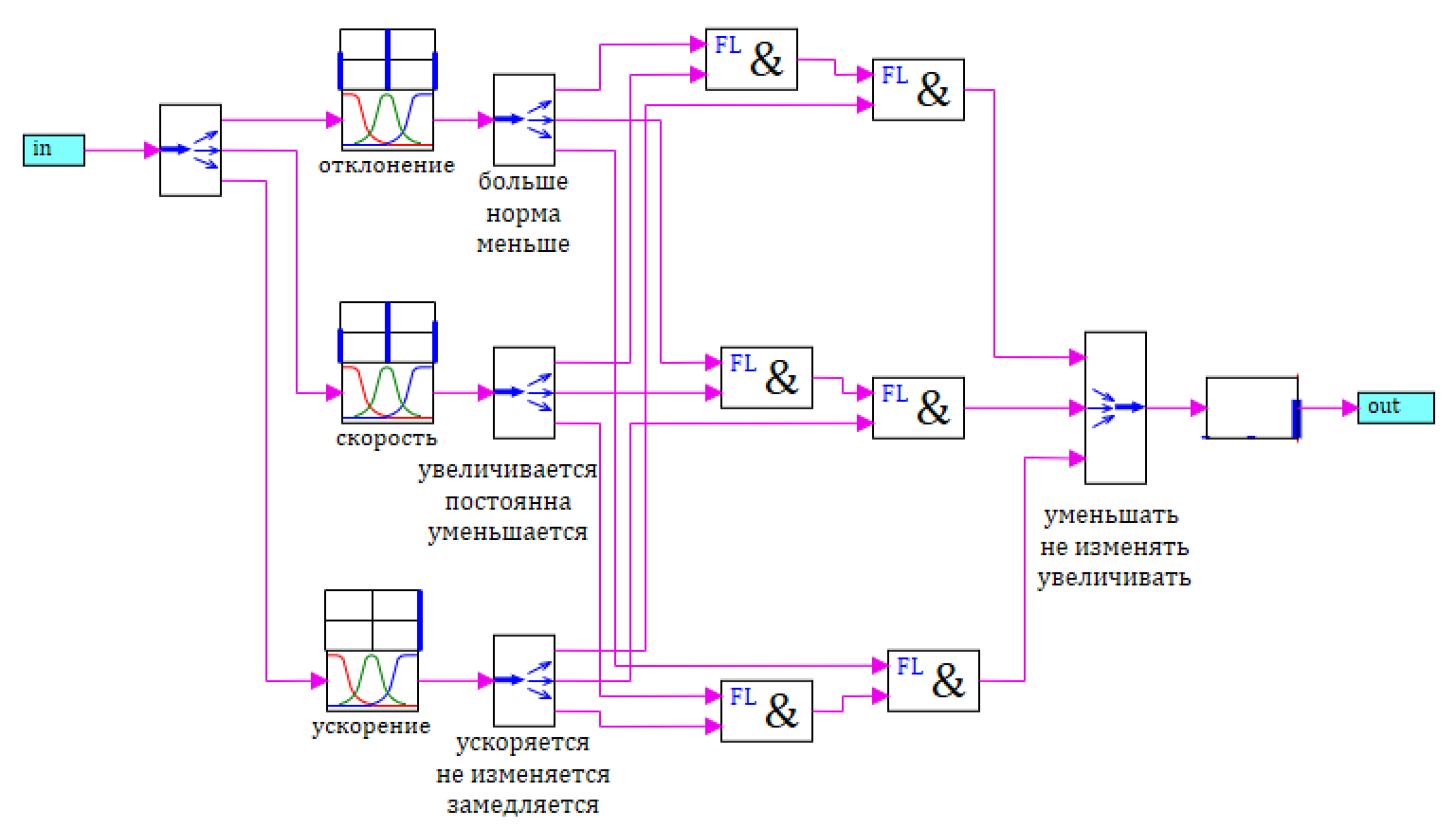
27. FL2.
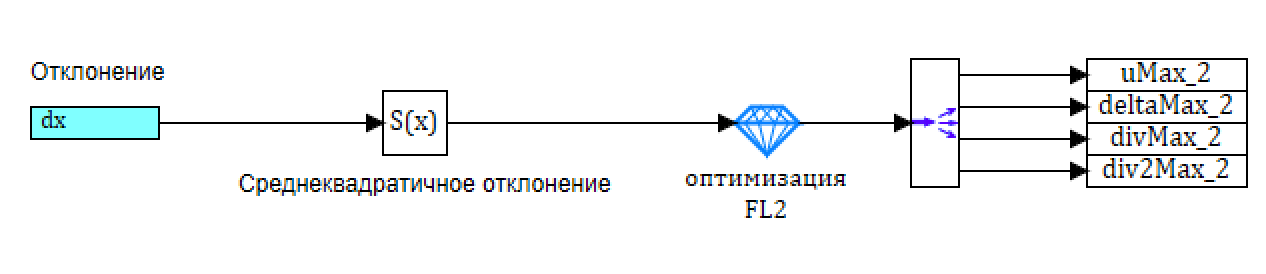
N , , 0, .
:
— uMax_2 – ;
— deltaMax_2 – ;
— divMax_2 – ;
— div2Max_2 – .
1 (. . 28)
1 , - , , 1 (. . 18 — 19) – , . . (. . 28)

28. .
: , . 29, – 30.
29. .

30. .
, . , . , .
, . .
:
sign, -1,0,1 , « », 1 . , , .
, .
, , 1.2 , .
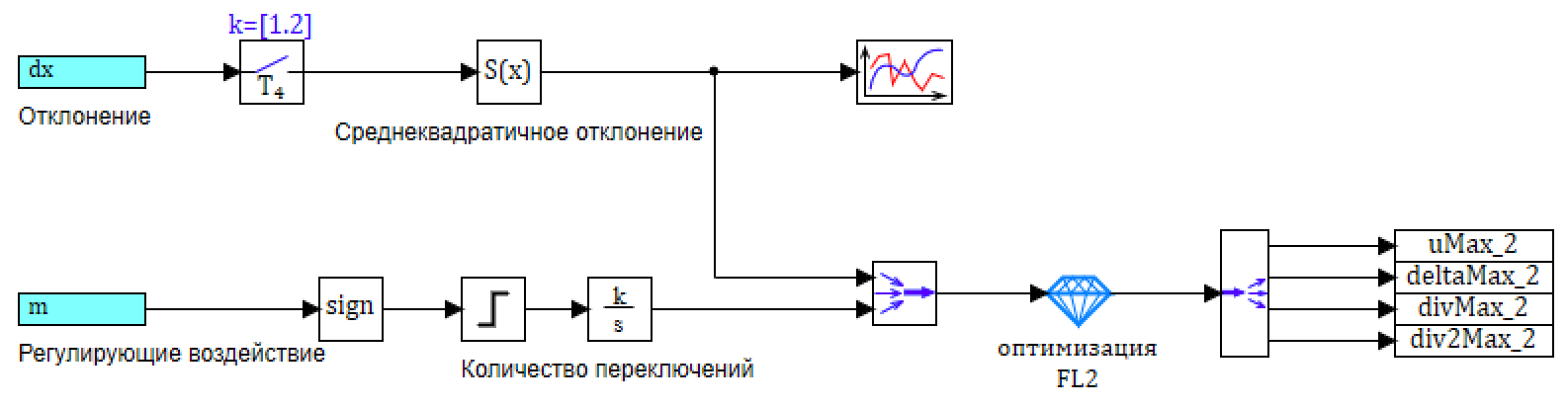
31. ee.
:
[]: « = [16.564415, 0.0027674129, 0.19085771, 50], = [0.0047956855, 11]» Macro5.OptimizeBlock6
, :
— uMax_2 – = 16.564;
— deltaMax_2 – = 0.00277;
— divMax_2 – = 0.191;
— div2Max_2 – = 50.
32.
, , , . 1, 2 , .
33. , , .
 33. 1 2.
33. 1 2.
, , , . . 34.
34. -.
2, , . - :

35. -.
:
, , .
...