Hatten Sie so etwas, dass Ihnen etwas im Online-Shop gefallen hat, Sie es aber nicht kaufen möchten, ohne es anzuprobieren? In einigen Geschäften besteht natürlich die Möglichkeit, Kleidung nach der Bestellung vor der Zahlung anzuprobieren. Laut Statistik wächst der Anteil der Online-Bestellungen von Kleidung und Schuhen in Online-Shops jedes Jahr, aber auch der Anteil der Retouren steigt auf 50–70% - dies sind enorme Logistikkosten, die mit der Online-Umkleidekabine erheblich gesenkt werden können. Stellen Sie sich vor, Sie laden Ihr Foto hoch, wählen Kleidung aus und es wird auf Ihr Bild übertragen. Virtuelle Umkleidekabinen für Schuhe gibt es bereits, sie funktionieren recht erfolgreich. Vor einiger Zeit haben wir uns für dieses Thema interessiert, was ist mit Kleidung? Solche Werke existieren auch, aber viel weniger erfolgreiche, in vielen von ihnen ist neben dem Artikel nichts zu finden,Man kann nur von einem funktionierenden Beispiel träumen. Wir haben uns entschlossen, dies zu beheben und eines der Netzwerke in der OpenCV-Bibliothek zu unterstützen. Was dabei herauskam, kann man sehenvirtual_try_on.py Beispiel.
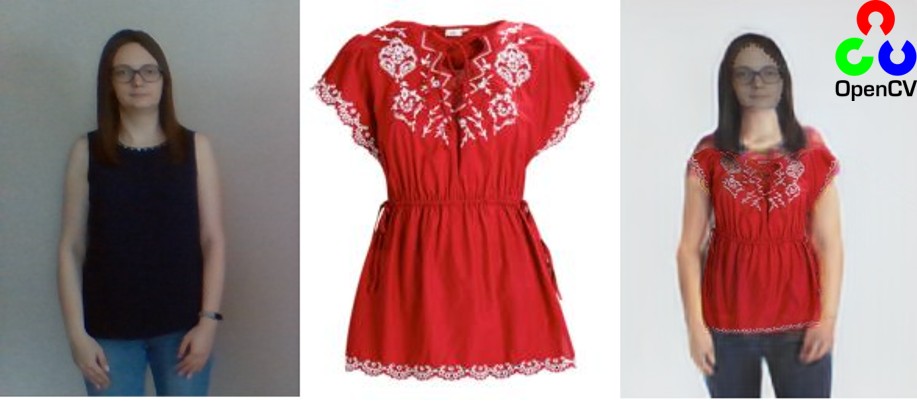
Das Ergebnis ist nicht perfekt, wird aber in diesem Bereich als recht gut angesehen.
Wenn Sie wissen möchten, wie die virtuelle Umkleidekabine funktioniert und auf welche Schwierigkeiten wir bei der Integration des Modells in OpenCV gestoßen sind, sind Sie bei der Katze willkommen!
2019 CP-VTON . CP-VTON , , (, ). 3D , 3D-. . github. CP-VTON , , .
.
CP-VTON : GMM (Geometric Matching Module) — TOM (Try-On Module) — .
GMM , TOM — , — , — , — GMM, — ground truth ( ), — ground truth ( , ). , . VITON, . , , , , (, , ). . , GMM , . TOM , .
. , . OpenPose. . LIP_JPPNet. OpenCV () sample human_parsing.py.
, — , : , , . , .

.
GMM . , , . . . , . .

TOM . Unet. , . Unet , . , Unet . , . Upsample . (encoder) VGG-19. . Unet . , .
— .

Try-On — . . , , . perceptual loss. VGG , . VGG — , .
OpenCV
. json , OpenPose Caffe, LIP.
, , .
python3 virtual_try_on.py -i person_img.jpg -c cloth.jpg
OpenCV PIL. . LIP , . CP-VTON . , :
shape = (segm > 0).astype(np.float32)
head = (segm == 1).astype(np.float32) + \
(segm == 2).astype(np.float32) + \
(segm == 4).astype(np.float32) + \
(segm == 13).astype(np.float32)
cloth = (segm == 5).astype(np.float32) + \
(segm == 6).astype(np.float32) + \
(segm == 7).astype(np.float32)
, PIL , . human_colormap.mat. ? Matlab . , scipy . () .
– . 16 , .
mask = mask.resize((width // 16, height // 16), Image.BILINEAR)
mask = mask.resize((width, height), Image.BILINEAR)
. . , OpenCV. PIL resize cv.resize .


, PIL resize, — cv.resize.
, ? .


, PIL resize, — cv.resize.
, . ? , . , – . , bilinear resize bilinear, area. scale factor, 33 = 16 * 2 + 1, OpenCV – 3. , , . . . , . . :
PILclass BilinearFilter(object):
"""
PIL bilinear resize implementation
image = image.resize((image_width // 16, image_height // 16), Image.BILINEAR)
"""
def _precompute_coeffs(self, inSize, outSize):
filterscale = max(1.0, inSize / outSize)
ksize = int(np.ceil(filterscale)) * 2 + 1
kk = np.zeros(shape=(outSize * ksize, ), dtype=np.float32)
bounds = np.empty(shape=(outSize * 2, ), dtype=np.int32)
centers = (np.arange(outSize) + 0.5) * filterscale + 0.5
bounds[::2] = np.where(centers - filterscale < 0, 0, centers - filterscale)
bounds[1::2] = np.where(centers + filterscale > inSize, inSize, centers + filterscale) - bounds[::2]
xmins = bounds[::2] - centers + 1
points = np.array([np.arange(row) + xmins[i] for i, row in enumerate(bounds[1::2])]) / filterscale
for xx in range(0, outSize):
point = points[xx]
bilinear = np.where(point < 1.0, 1.0 - abs(point), 0.0)
ww = np.sum(bilinear)
kk[xx * ksize : xx * ksize + bilinear.size] = np.where(ww == 0.0, bilinear, bilinear / ww)
return bounds, kk, ksize
def _resample_horizontal(self, out, img, ksize, bounds, kk):
for yy in range(0, out.shape[0]):
for xx in range(0, out.shape[1]):
xmin = bounds[xx * 2 + 0]
xmax = bounds[xx * 2 + 1]
k = kk[xx * ksize : xx * ksize + xmax]
out[yy, xx] = np.round(np.sum(img[yy, xmin : xmin + xmax] * k))
def _resample_vertical(self, out, img, ksize, bounds, kk):
for yy in range(0, out.shape[0]):
ymin = bounds[yy * 2 + 0]
ymax = bounds[yy * 2 + 1]
k = kk[yy * ksize: yy * ksize + ymax]
out[yy] = np.round(np.sum(img[ymin : ymin + ymax, 0:out.shape[1]] * k[:, np.newaxis], axis=0))
def imaging_resample(self, img, xsize, ysize):
height, width, *args = img.shape
bounds_horiz, kk_horiz, ksize_horiz = self._precompute_coeffs(width, xsize)
bounds_vert, kk_vert, ksize_vert = self._precompute_coeffs(height, ysize)
out_hor = np.empty((img.shape[0], xsize), dtype=np.uint8)
self._resample_horizontal(out_hor, img, ksize_horiz, bounds_horiz, kk_horiz)
out = np.empty((ysize, xsize), dtype=np.uint8)
self._resample_vertical(out, out_hor, ksize_vert, bounds_vert, kk_vert)
return out
4 , , OpenCV. . , . , . 256 192, . sample . , - , .
P.S. 2020 OpenCV 20-. . !