Zusammenbau eines tragbaren Magnetometers
Übersetzung eines Artikels von der Instructables-Schulungsmaterialseite Ein Magnetometer , manchmal auch als Gaußometer bezeichnet, misst die Stärke eines Magnetfelds [ in diesem Fall magnetische Induktion / ca. perev. ]. Dies ist eine Vorrichtung, die zur Messung der Stärke von Permanentmagneten und Elektromagneten sowie zur Ermittlung der Feldform nicht trivialer Magnetkombinationen erforderlich ist. Es ist empfindlich genug, um die Magnetisierung von Metallgegenständen zu erfassen. Wenn die Sonde schnell genug arbeitet, kann sie zeitlich veränderliche Felder von Motoren und Transformatoren erkennen.Mobiltelefone haben normalerweise ein dreiachsiges Magnetometer, das jedoch für ein schwaches Erdmagnetfeld mit einer Kraft von 1 Gauß = 0,1 mT [ Milliliter] optimiert ist] und ist in Feldern mit einer Induktion von mehreren mT gesättigt. Es ist normalerweise nicht klar, wo genau sich dieser Sensor im Telefon befindet, und es ist oft unmöglich, ihn in einem Engpass wie einem Magnetschnitt zu platzieren. Darüber hinaus ist es besser, das Smartphone überhaupt nicht an starke Magnete zu bringen.In diesem Artikel werde ich beschreiben, wie man aus gängigen Komponenten das einfachste tragbare Magnetometer herstellt: Wir benötigen einen linearen Hallsensor, Arduino, ein Display und eine Taste. Die Gesamtkosten des Geräts überschreiten nicht 5 € und messen die Induktion von -100 bis +100 mT mit einem Fehler von 0,01 mT - viel besser als erwartet. Um genaue absolute Indikatoren zu erhalten, müssen Sie diese kalibrieren: Ich werde beschreiben, wie dies mit Hilfe eines langen hausgemachten Magneten gemacht wird.
Magnetometer , manchmal auch als Gaußometer bezeichnet, misst die Stärke eines Magnetfelds [ in diesem Fall magnetische Induktion / ca. perev. ]. Dies ist eine Vorrichtung, die zur Messung der Stärke von Permanentmagneten und Elektromagneten sowie zur Ermittlung der Feldform nicht trivialer Magnetkombinationen erforderlich ist. Es ist empfindlich genug, um die Magnetisierung von Metallgegenständen zu erfassen. Wenn die Sonde schnell genug arbeitet, kann sie zeitlich veränderliche Felder von Motoren und Transformatoren erkennen.Mobiltelefone haben normalerweise ein dreiachsiges Magnetometer, das jedoch für ein schwaches Erdmagnetfeld mit einer Kraft von 1 Gauß = 0,1 mT [ Milliliter] optimiert ist] und ist in Feldern mit einer Induktion von mehreren mT gesättigt. Es ist normalerweise nicht klar, wo genau sich dieser Sensor im Telefon befindet, und es ist oft unmöglich, ihn in einem Engpass wie einem Magnetschnitt zu platzieren. Darüber hinaus ist es besser, das Smartphone überhaupt nicht an starke Magnete zu bringen.In diesem Artikel werde ich beschreiben, wie man aus gängigen Komponenten das einfachste tragbare Magnetometer herstellt: Wir benötigen einen linearen Hallsensor, Arduino, ein Display und eine Taste. Die Gesamtkosten des Geräts überschreiten nicht 5 € und messen die Induktion von -100 bis +100 mT mit einem Fehler von 0,01 mT - viel besser als erwartet. Um genaue absolute Indikatoren zu erhalten, müssen Sie diese kalibrieren: Ich werde beschreiben, wie dies mit Hilfe eines langen hausgemachten Magneten gemacht wird.Schritt 1: Hallsensor
Der Hall-Effekt wird häufig zur Messung von Magnetfeldern verwendet. Wenn Elektronen einen in einem Magnetfeld angeordneten Leiter passieren, werden sie zur Seite getragen, wodurch eine Querpotentialdifferenz im Leiter auftritt. Wenn Sie das Material und die Geometrie des Halbleiters richtig auswählen, erhalten Sie ein messbares Signal, das dann verstärkt werden kann und eine Messung einer Komponente des Magnetfelds erzeugt.Ich benutze SS49E, da es billig und erschwinglich ist. Was ist aus seiner Dokumentation zu beachten :- Leistung: 2,7 - 6,5 V, was perfekt mit 5 V für Arduino kompatibel ist.
- Nullsignal: 2,25-2,75 V, ungefähr auf halber Strecke zwischen 0 und 5 V.
- Empfindlichkeit: 1,0-1,75 mV / G, daher ist eine Kalibrierung erforderlich, um genaue Ergebnisse zu erhalten.
- Ausgangsspannung: 1,0 - 4,0 V (für Betrieb ab 5 V): Der Bereich wird vom Arduino ADC abgedeckt.
- Bereich: mindestens ± 650 Gs, normalerweise +/1 1000 Gs.
- Reaktionszeit: 3 μs, dh es können Messungen mit einer Frequenz von einigen zehn kHz durchgeführt werden.
- Betriebsstrom: 6-10 mA, ausreichend für eine Batterie.
- Temperaturfehler: 0,1% pro Grad Celsius. Es scheint ein wenig, aber eine Abweichung von 0,1% ergibt einen Fehler von 3 mT.
Der Sensor ist kompakt (4 x 3 x 3 mm) und misst die Komponente des Magnetfelds senkrecht zu seiner Vorderseite. Es gibt einen positiven Wert für Felder, die von hinten nach vorne verlaufen - zum Beispiel, wenn sie dem Südpol eines Magneten zugewandt sind. Der Sensor hat drei Kontakte, +5 V, 0 V, und der Ausgang erfolgt von links nach rechts, wenn er vom Gesicht aus betrachtet wird.Schritt 2: Erforderliche Materialien
- Linearer Hall-Effekt-Sensor SS49E. 1 € für 10 Stück.
- Arduino Uno mit Prototyping Board oder Arduino Nano ohne Pins für die tragbare Version.
- Monochromes OLED-Display SSD1306 0,96 Zoll mit I2C-Schnittstelle.
- Taste.
Für Sonde:- Kugelschreiber oder ein anderes haltbares Rohr.
- 3 dünne Drähte etwas länger als die Röhre.
- 12 cm Schrumpfschlauch mit einem Durchmesser von 1,5 mm.
Für tragbare Version:- Eine große Tic-Tac-Box (18x46x83) oder ähnliches.
- 9V Batteriekontakte
- Schalter.
Schritt 3: Erste Version - Verwenden der Prototyping-Karte
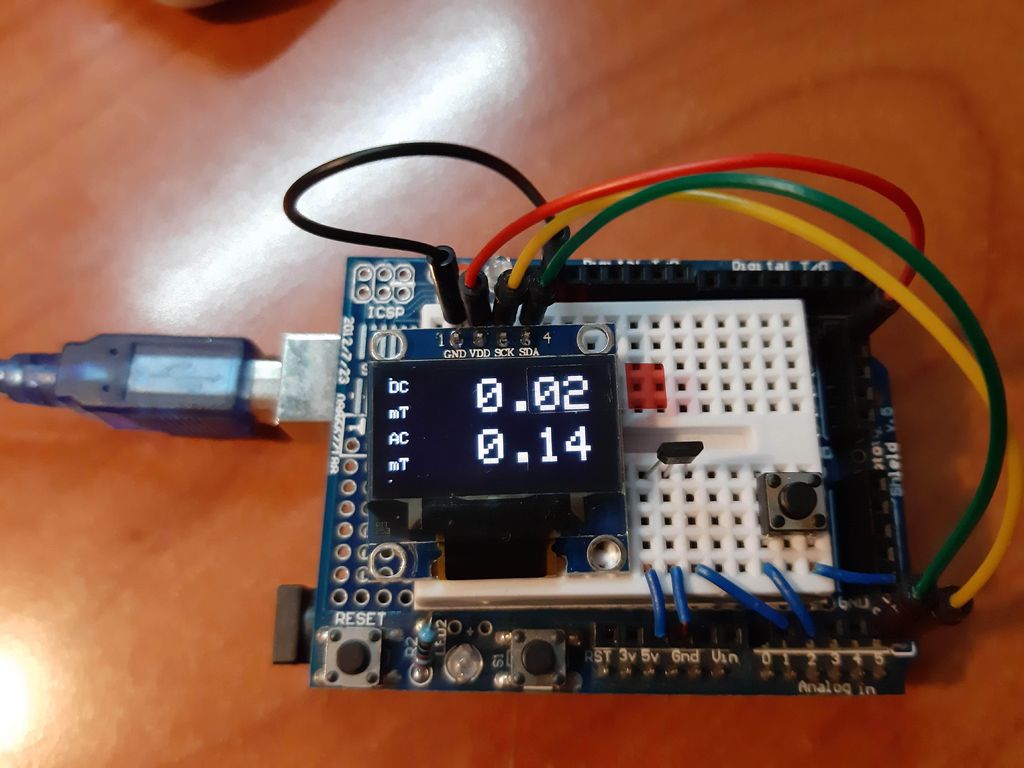
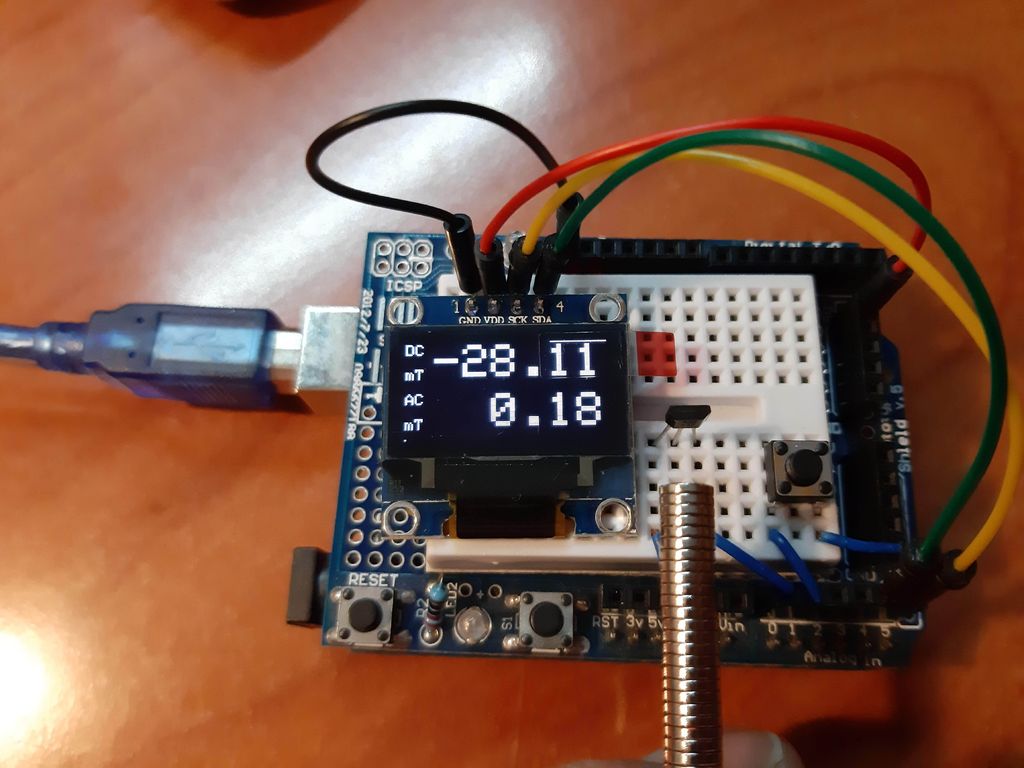 Erstellen Sie zunächst immer einen Prototyp, um den Betrieb aller Komponenten und Software zu testen! Die Verbindung ist im Bild sichtbar: Der Hallsensor ist an die Kontakte Arduino + 5V, GND, A1 (von links nach rechts) angeschlossen. Das Display wird an GND, + 5V, A5, A4 (von links nach rechts) angeschlossen. Wenn die Taste gedrückt wird, sollte der Boden und A0 geschlossen werden. In Arduino IDE v geschriebenerCode . 1.8.10. Erfordert die Installation der Bibliotheken Adafruit_SSD1306 und Adafruit_GFX.Wenn alles richtig gemacht wurde, sollte das Display DC- und AC-Werte anzeigen.
Erstellen Sie zunächst immer einen Prototyp, um den Betrieb aller Komponenten und Software zu testen! Die Verbindung ist im Bild sichtbar: Der Hallsensor ist an die Kontakte Arduino + 5V, GND, A1 (von links nach rechts) angeschlossen. Das Display wird an GND, + 5V, A5, A4 (von links nach rechts) angeschlossen. Wenn die Taste gedrückt wird, sollte der Boden und A0 geschlossen werden. In Arduino IDE v geschriebenerCode . 1.8.10. Erfordert die Installation der Bibliotheken Adafruit_SSD1306 und Adafruit_GFX.Wenn alles richtig gemacht wurde, sollte das Display DC- und AC-Werte anzeigen.Schritt 4: Ein bisschen über Code
Wenn Sie nicht an dem Code interessiert sind, können Sie diesen Teil überspringen.Ein wesentliches Merkmal des Codes ist, dass das Magnetfeld 2.000 Mal hintereinander gemessen wird. Es dauert 0,2 - 0,3 Sekunden. Durch Verfolgen der Summe und des Quadrats der Summe der Messungen ist es möglich, die Durchschnitts- und Standardabweichungen zu berechnen, die als DC und AC ausgegeben werden. Durch Mittelung über eine große Anzahl von Messungen erhöhen wir die Genauigkeit theoretisch um √2000 ≈ 45. Es stellt sich heraus, dass wir mit einem 10-Bit-ADC die Genauigkeit eines 15-Bit-ADC erhalten! Und es ist wichtig: 1 Schritt des ADC ist 4 mV, dh ~ 0,3 mT. Aufgrund der Mittelwertbildung reduzieren wir den Fehler von 0,3 mT auf 0,01 mT.Als Bonus erhalten wir die Standardabweichung und bestimmen so das sich ändernde Feld. Ein mit einer Frequenz von 50 Hz schwingendes Feld durchläuft während der Messung etwa 10 Zyklen, sodass Sie den Wert von AC messen können.Nach der Kompilierung habe ich die folgenden Statistiken erhalten: Sketch verwendet 16852 Byte (54%) des Programmspeicherplatzes. Das Maximum beträgt 30720 Bytes. Globale Variablen belegen 352 Bytes (17%) des dynamischen Speichers, während 1696 Bytes für lokale Variablen übrig bleiben. Das Maximum beträgt 2048 Bytes.Der größte Teil des Platzes wird von Adafruit-Bibliotheken belegt, aber es gibt noch viel Platz, um Funktionen hinzuzufügen.Schritt 5: Kochen der Sonde
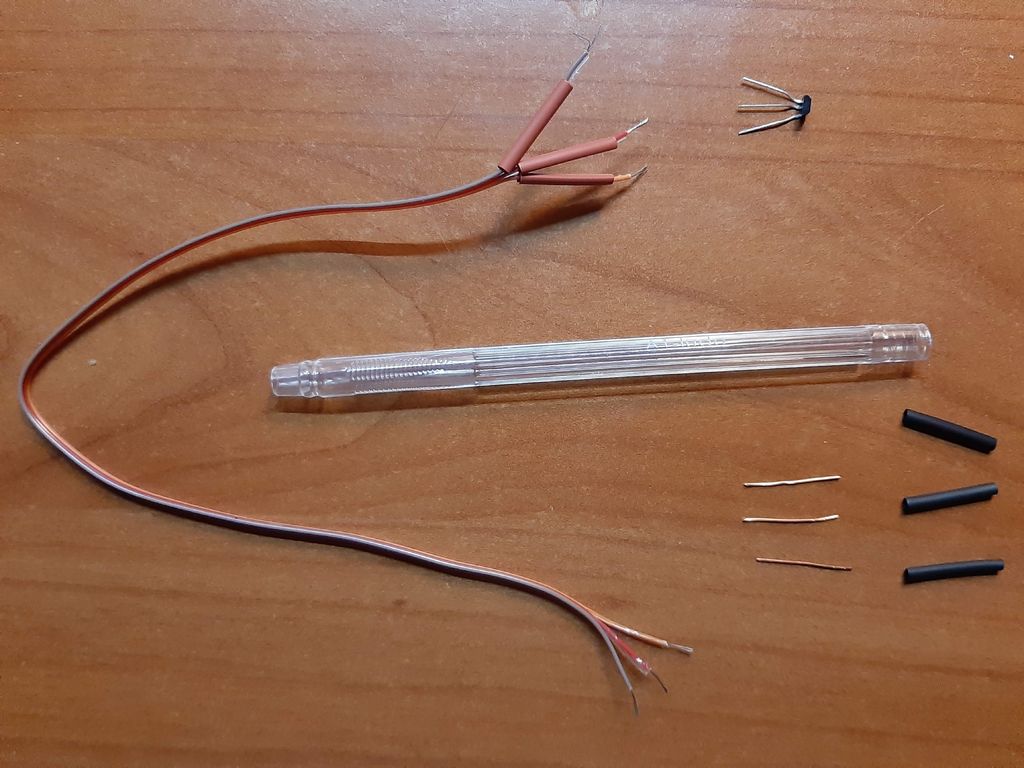
 Die Sonde wird am besten am Ende eines schmalen Rohrs befestigt: Sie wird einfach platziert und an engen Stellen gehalten. Jedes Rohr aus nicht magnetischem Material reicht aus. Der alte Kugelschreiber war perfekt für mich.Bereiten Sie drei dünne flexible Drähte vor, die etwas länger als der Schlauch sind. In meinem Kabel gibt es keine Logik in den Farben der Drähte (orange + 5 V, rot 0 V, grau - Signal), es fällt mir nur leichter, mich an sie zu erinnern.Um eine Sonde mit einem Prototyp zu verwenden, löten Sie Drahtstücke an das Ende des Kabels und isolieren Sie sie mit Schrumpfschlauch. Später können sie abgeschnitten und direkt mit dem Arduino verlötet werden.
Die Sonde wird am besten am Ende eines schmalen Rohrs befestigt: Sie wird einfach platziert und an engen Stellen gehalten. Jedes Rohr aus nicht magnetischem Material reicht aus. Der alte Kugelschreiber war perfekt für mich.Bereiten Sie drei dünne flexible Drähte vor, die etwas länger als der Schlauch sind. In meinem Kabel gibt es keine Logik in den Farben der Drähte (orange + 5 V, rot 0 V, grau - Signal), es fällt mir nur leichter, mich an sie zu erinnern.Um eine Sonde mit einem Prototyp zu verwenden, löten Sie Drahtstücke an das Ende des Kabels und isolieren Sie sie mit Schrumpfschlauch. Später können sie abgeschnitten und direkt mit dem Arduino verlötet werden.Schritt 6: Zusammenbau des tragbaren Instruments
 Die 9-V-Batterie, der OLED-Bildschirm und der Arduino Nano passen bequem in eine große Tic-Tac-Box. Der Vorteil ist die Transparenz - der Bildschirm ist auch im Inneren gut lesbar. Alle festen Komponenten (Sonde, Schalter und Knopf) befinden sich auf der Abdeckung, sodass alles aus der Verpackung genommen werden kann, um die Batterie auszutauschen oder den Code zu aktualisieren.Ich habe 9-V-Batterien nie gemocht - sie haben einen hohen Preis und eine geringe Kapazität. Aber in meinem Supermarkt fingen sie plötzlich an, ihre wiederaufladbare Version von NiMH für 1 € zu verkaufen, und ich fand, dass sie leicht zu laden waren, wenn 11 V durch einen 100-Ohm-Widerstand gespeist und über Nacht stehen gelassen wurden. Ich habe billige Batteriestecker für mich bestellt, aber sie haben sie mir nicht geschickt, deshalb habe ich die alte 9-V-Batterie zerlegt, um daraus einen Stecker zu machen. Plus 9V Batterien in seiner Kompaktheit, und in diesem Arduino funktioniert gut daran, wenn an Vin angeschlossen. Bei +5 V liegt eine einstellbare Spannung von 5 V vor, die für die OLED und den Hallsensor benötigt wird.Der Hallsensor, der Bildschirm und die Taste sind wie beim Prototyp verbunden. Zwischen dem Akku und dem Arduino wird nur der Netzschalter hinzugefügt.
Die 9-V-Batterie, der OLED-Bildschirm und der Arduino Nano passen bequem in eine große Tic-Tac-Box. Der Vorteil ist die Transparenz - der Bildschirm ist auch im Inneren gut lesbar. Alle festen Komponenten (Sonde, Schalter und Knopf) befinden sich auf der Abdeckung, sodass alles aus der Verpackung genommen werden kann, um die Batterie auszutauschen oder den Code zu aktualisieren.Ich habe 9-V-Batterien nie gemocht - sie haben einen hohen Preis und eine geringe Kapazität. Aber in meinem Supermarkt fingen sie plötzlich an, ihre wiederaufladbare Version von NiMH für 1 € zu verkaufen, und ich fand, dass sie leicht zu laden waren, wenn 11 V durch einen 100-Ohm-Widerstand gespeist und über Nacht stehen gelassen wurden. Ich habe billige Batteriestecker für mich bestellt, aber sie haben sie mir nicht geschickt, deshalb habe ich die alte 9-V-Batterie zerlegt, um daraus einen Stecker zu machen. Plus 9V Batterien in seiner Kompaktheit, und in diesem Arduino funktioniert gut daran, wenn an Vin angeschlossen. Bei +5 V liegt eine einstellbare Spannung von 5 V vor, die für die OLED und den Hallsensor benötigt wird.Der Hallsensor, der Bildschirm und die Taste sind wie beim Prototyp verbunden. Zwischen dem Akku und dem Arduino wird nur der Netzschalter hinzugefügt.Schritt 7: Kalibrierung
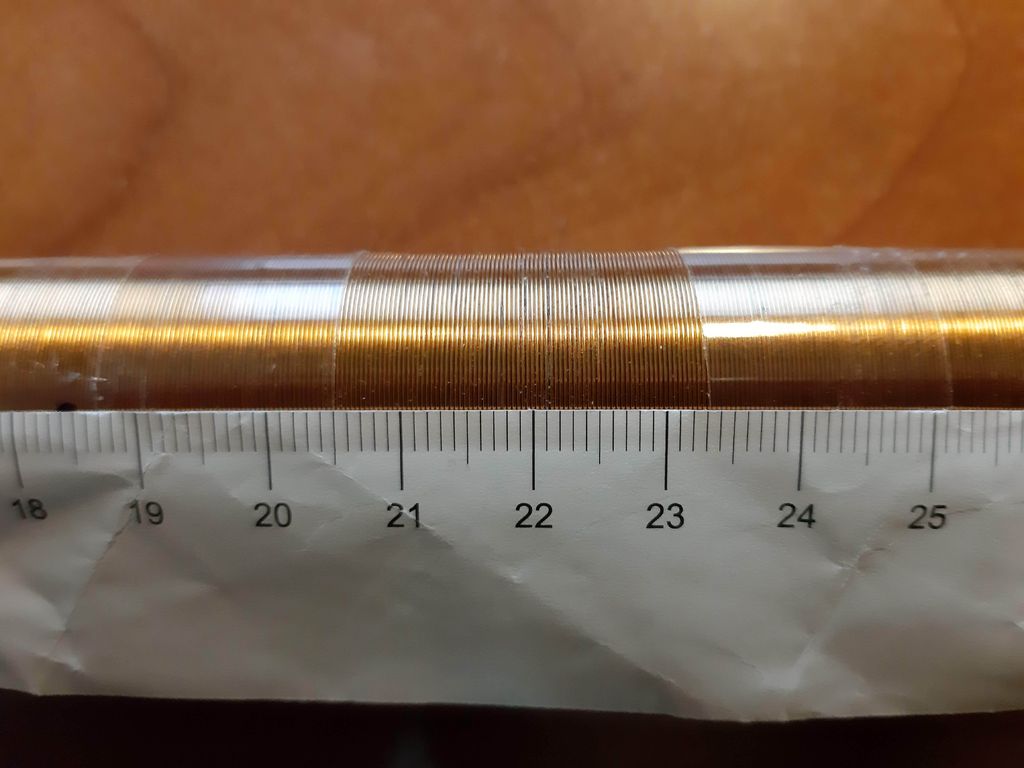

 Die Kalibrierungskonstante im Code entspricht der in der Dokumentation angegebenen Anzahl (1,4 mV / G), der Bereich dieses Wertes (1,0-1,75 mV / G) ist jedoch in der Dokumentation zulässig. Um genaue Ergebnisse zu erhalten, müssen Sie die Sonde kalibrieren.Der einfachste Weg, ein genau definiertes Magnetfeld zu erhalten, ist die Verwendung eines Solenoids. Die magnetische Induktion des Magnetfelds beträgt B = μ 0 * n * I. Die magnetische Konstante (oder magnetische Permeabilität des Vakuums) ist eine natürliche Konstante: μ 0 = 1,2566 × 10 –6T / m / A. Das Feld ist gleichmäßig und hängt nur von der Wicklungsdichte n und dem Strom I ab, die mit einem Fehler von ca. 1% gemessen werden können. Die Formel funktioniert für einen Magneten unendlicher Länge, dient jedoch als sehr gute Annäherung für das Feld in seiner Mitte, wenn das Verhältnis von Länge zu Durchmesser 10 überschreitet.Um einen geeigneten Magneten zusammenzubauen, nehmen Sie ein hohlzylindrisches Rohr, das zehnmal länger als der Durchmesser ist, und wickeln Sie es von einem isolierten Drähte. Ich habe ein PVC-Rohr mit einem Außendurchmesser von 23 mm verwendet und 566 Windungen mit einer Länge von 20,2 cm gemacht, was n = 28 / cm = 2800 / m ergibt. Die Drahtlänge beträgt 42 m, der Widerstand beträgt 10 Ohm.Schalten Sie die Spule ein und messen Sie den Strom mit einem Multimeter. Verwenden Sie entweder eine einstellbare Stromquelle oder einen variablen Widerstand, um den Strom zu steuern. Messen Sie das Magnetfeld für verschiedene Stromwerte und vergleichen Sie die Messwerte.Vor der Kalibrierung erhielt ich 6,04 mT / A, obwohl es theoretisch 3,50 mT / A gewesen sein sollte. Daher habe ich die Kalibrierungskonstante in der 18. Zeile des Codes mit 0,58 multipliziert. Fertig - das Magnetometer ist kalibriert!
Die Kalibrierungskonstante im Code entspricht der in der Dokumentation angegebenen Anzahl (1,4 mV / G), der Bereich dieses Wertes (1,0-1,75 mV / G) ist jedoch in der Dokumentation zulässig. Um genaue Ergebnisse zu erhalten, müssen Sie die Sonde kalibrieren.Der einfachste Weg, ein genau definiertes Magnetfeld zu erhalten, ist die Verwendung eines Solenoids. Die magnetische Induktion des Magnetfelds beträgt B = μ 0 * n * I. Die magnetische Konstante (oder magnetische Permeabilität des Vakuums) ist eine natürliche Konstante: μ 0 = 1,2566 × 10 –6T / m / A. Das Feld ist gleichmäßig und hängt nur von der Wicklungsdichte n und dem Strom I ab, die mit einem Fehler von ca. 1% gemessen werden können. Die Formel funktioniert für einen Magneten unendlicher Länge, dient jedoch als sehr gute Annäherung für das Feld in seiner Mitte, wenn das Verhältnis von Länge zu Durchmesser 10 überschreitet.Um einen geeigneten Magneten zusammenzubauen, nehmen Sie ein hohlzylindrisches Rohr, das zehnmal länger als der Durchmesser ist, und wickeln Sie es von einem isolierten Drähte. Ich habe ein PVC-Rohr mit einem Außendurchmesser von 23 mm verwendet und 566 Windungen mit einer Länge von 20,2 cm gemacht, was n = 28 / cm = 2800 / m ergibt. Die Drahtlänge beträgt 42 m, der Widerstand beträgt 10 Ohm.Schalten Sie die Spule ein und messen Sie den Strom mit einem Multimeter. Verwenden Sie entweder eine einstellbare Stromquelle oder einen variablen Widerstand, um den Strom zu steuern. Messen Sie das Magnetfeld für verschiedene Stromwerte und vergleichen Sie die Messwerte.Vor der Kalibrierung erhielt ich 6,04 mT / A, obwohl es theoretisch 3,50 mT / A gewesen sein sollte. Daher habe ich die Kalibrierungskonstante in der 18. Zeile des Codes mit 0,58 multipliziert. Fertig - das Magnetometer ist kalibriert! Source: https://habr.com/ru/post/undefined/
All Articles