ROS: Gewidmet denen, die im Pavillon festsitzen ... Plattform für einen Roboter für 28.000 Rubel
Montageanleitung für eine Roboterplattform zur Untersuchung von ROS mit einer Tragfähigkeit von mehr als 30 kg
ROS ist ein Meta-Betriebssystem (Open Source) für Roboter. Es ist ein Industriestandard geworden. Mit einer vorgefertigten Messaging-Schnittstelle zwischen verschiedenen Knoten Ihres Systems und einer Vielzahl vorgefertigter Lösungen für verschiedene Komponenten ist es sehr einfach, Ihren Roboter zu bauen.Für ROS gibt es eine Pavillon-Simulatorumgebung, d.h. Sie können den Roboter programmieren, ohne ihn physisch zu haben. Die erste Bekanntschaft mit ROS ist eine Freude für die Mehrheit. Sie veröffentlichen und lesen Themen und versuchen, mit Turtlesim umzugehen. Und dann kann es ein Problem beim Übergang zu voll funktionsfähigen Robotern geben, die mit der Umgebung interagieren. Ein Teil geht weiter und erstellt den notwendigen Roboter im Simulator. Viele bleiben im Pavillon stecken, ich widme ihnen diesen Beitrag.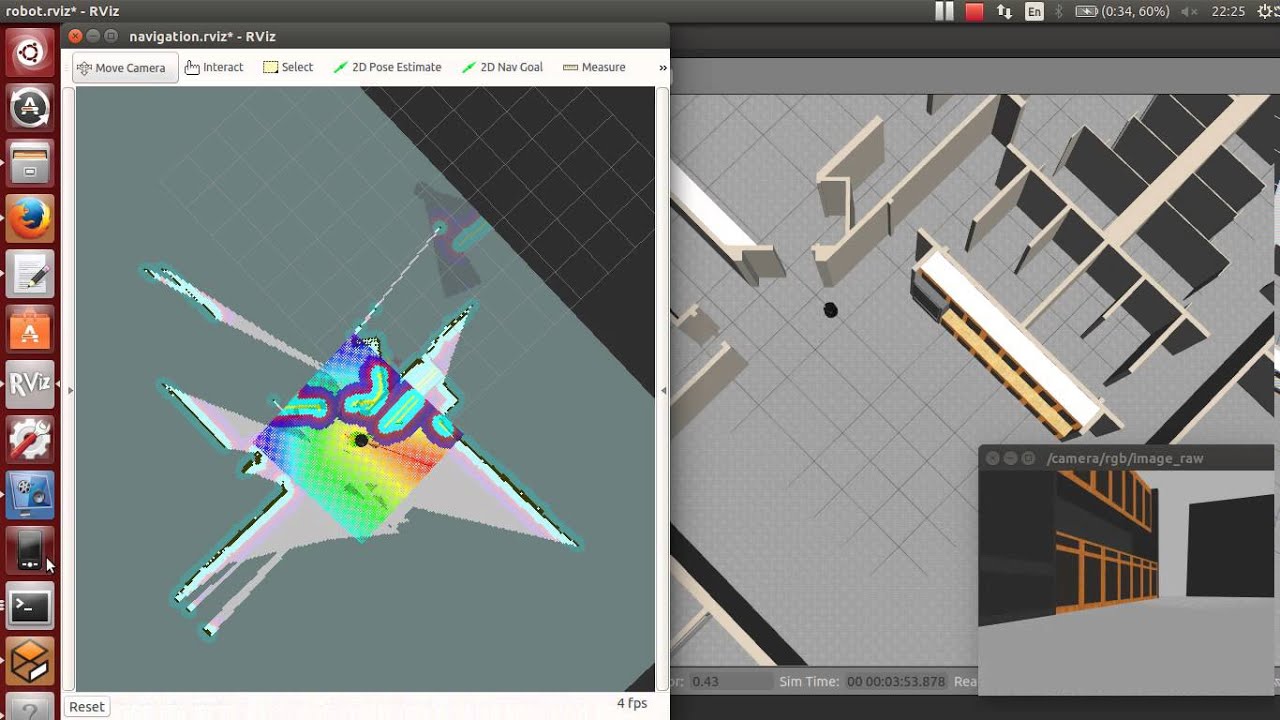 Nach der Veröffentlichung auf habr.com über Roboter und Robotik kontaktieren mich Kunden mit der Notwendigkeit, Roboterlösungen zu entwickeln. Eine interessante Aufgabe besteht darin, die Navigation von Logistikrobotern so zu organisieren, dass globale Ziele aus dem vorhandenen Lagerverwaltungssystem (WMS) erreicht werden. Der Kunde entwickelt die Mechanik des Wagens selbst. Um jedoch parallel an der Software arbeiten zu können, ist eine Plattform erforderlich, die den Warenverkehr simulieren kann. Um die Algorithmen unseres Roboters unter den Bedingungen eines harten und regnerischen Winters zu testen , brauchten wir außerdem eine Indoor-Plattform. Die Mindestanforderungen an die Ausrüstung wurden zusammengestellt:
Nach der Veröffentlichung auf habr.com über Roboter und Robotik kontaktieren mich Kunden mit der Notwendigkeit, Roboterlösungen zu entwickeln. Eine interessante Aufgabe besteht darin, die Navigation von Logistikrobotern so zu organisieren, dass globale Ziele aus dem vorhandenen Lagerverwaltungssystem (WMS) erreicht werden. Der Kunde entwickelt die Mechanik des Wagens selbst. Um jedoch parallel an der Software arbeiten zu können, ist eine Plattform erforderlich, die den Warenverkehr simulieren kann. Um die Algorithmen unseres Roboters unter den Bedingungen eines harten und regnerischen Winters zu testen , brauchten wir außerdem eine Indoor-Plattform. Die Mindestanforderungen an die Ausrüstung wurden zusammengestellt:- Plattform mit 2 Rädern
- Tragfähigkeit mindestens 30 kg.
- Lidar RPlidar A1
- Raspberry Pi Single Board Computer
- Arduino Mega Plattform
- Sonar
Der erste Gedanke war, eine vorgefertigte Plattform zu verwenden. Wir haben den Markt für ähnliche ROS-Lösungen geschätzt. TurtleBot3 Burger und der Roboter auf Neato passten nicht zu uns, weil wollte die Lieferung von Kartons simulieren.Nach dem Sammeln dieser Daten wurde eine willensstarke Entscheidung getroffen, eine Plattform aufzubauen. Wir haben die Plattform für das maximale Budget zusammengestellt. Ich poste Montageanweisungen. Vielleicht ist sie für jemanden nützlich.Gehäusegröße 320 * 620 * 195 mmDer Körper wird durch CNC-Fräsen eines Verbundwerkstoffs hergestellt. Wer eine Datei zum Schneiden benötigt, schreibt mir am Ende des Beitrags eine E-Mail.Beim Schneiden vorgesehene Schlitze zum Biegen. Montage an den Ecken.BLDC 10 'Räder, Radfahrer, Batterie und Ladegerät werden aus dem Gyroskop entnommen. Sie können dafür ein neues kaufen, in jedem Fall ist es billiger als die entsprechenden Teile separat.Wir befestigen die Räder mit den gedruckten Teilen am Gehäuse. Https://www.thingiverse.com/thing:2990353Die Gyroskopplatte muss neu geflasht werden. Ich habe diese Firmware verwendetgithub.com/NiklasFauth/hoverboard-firmware-hack , es gibt Variationen. Es gibt einen Online-Compiler im Internet.Als Grundlage für die Navigation verwenden wir Kilometerzähler von den Rädern und Rplidar A1.Als Computer, Raspberry Pi als beliebte Budgetlösung, denken wir über die Version mit Jetsoin Nano nach.Da Lidar bis zu 1A, Raspberry Pi bis zu 2A benötigt, entschied sich Arduino, einen USB-Splitter mit separater Stromversorgung über einen Abwärtswandler von der Hauptbatterie zu versorgen.


 ROS Master befindet sich auf einem separaten Computer, da wir eine Realsense-Kamera hinzufügen möchten.Die meisten Knoten werden auf dem Master-Computer ausgeführt:
ROS Master befindet sich auf einem separaten Computer, da wir eine Realsense-Kamera hinzufügen möchten.Die meisten Knoten werden auf dem Master-Computer ausgeführt:- Knoten, um die Koordinaten des aktuellen Ziels von der Basis zu erhalten
- Freude
- move_base
- amcl
- gmapping
Ein Teil der Knoten auf dem Rover:- rosserial_arduino
- rplidar_ros
Dieser Roboter hat jede Chance, ein separates kommerzielles Projekt zu werden.Es gibt noch viel Arbeit:- müssen ein urdf-Modell erstellen
- Entwicklung von Plattformnutzungsszenarien
- Berücksichtigen Sie die Kompatibilität mit anderen Geräten
- Konfigurieren Sie die Arbeit mehrerer Roboter gleichzeitig
Wenn Sie dieses Kit für die Kosten von Komponenten kaufen oder Teil des Projekts werden und dieses Produkt mit uns entwickeln möchten, schreiben Sie mir https://forms.yandex.ru/u/5e3d0be770f10402303acf87/Source: https://habr.com/ru/post/undefined/
All Articles