تم بناء المشروع على أساس مشروع آخر معروف جيدًا في دوائره - linorobot (linorobot.org) ، باستخدام المكونات المتاحة للشخص العادي البسيط. الأهداف التي تم تحديدها: لتحقيق حركة مستقلة للروبوت في المنزل باستخدام مكونات منخفضة التكلفة ، وتقييم أداء أجهزة الكمبيوتر المصغرة للأغراض المذكورة ، لتكوين حزمة التنقل للتحرك في المساحات الضيقة من خروتشوف.حديد
قائمة المكونات في المواد الصلبة هي كما يلي:- التوت بي 3B - 2800 ص.
- lidar rplidar a1 - 7500 ص ؛
- جسور الطاقة l298n -2pcs - 400 rub.
- العجلات مع التشفير من النوع A و B - 2000 ص. (210 دورة في الدقيقة - رابط )
- teenzy 3.2 - 2100 ص ؛
- imu 9250 (إما 9150 أو 6050) - 240 ص ؛
- بنك الطاقة في 10000mH - 1500 ص.
- عدد 3 بطاريات 18650 وحامل -600 ص.
- تنحى محول DC-DC ج 5V إلى 3.3V - 20P.
- قطعة من الخشب الرقائقي ، الباركيه -؟ فرك.
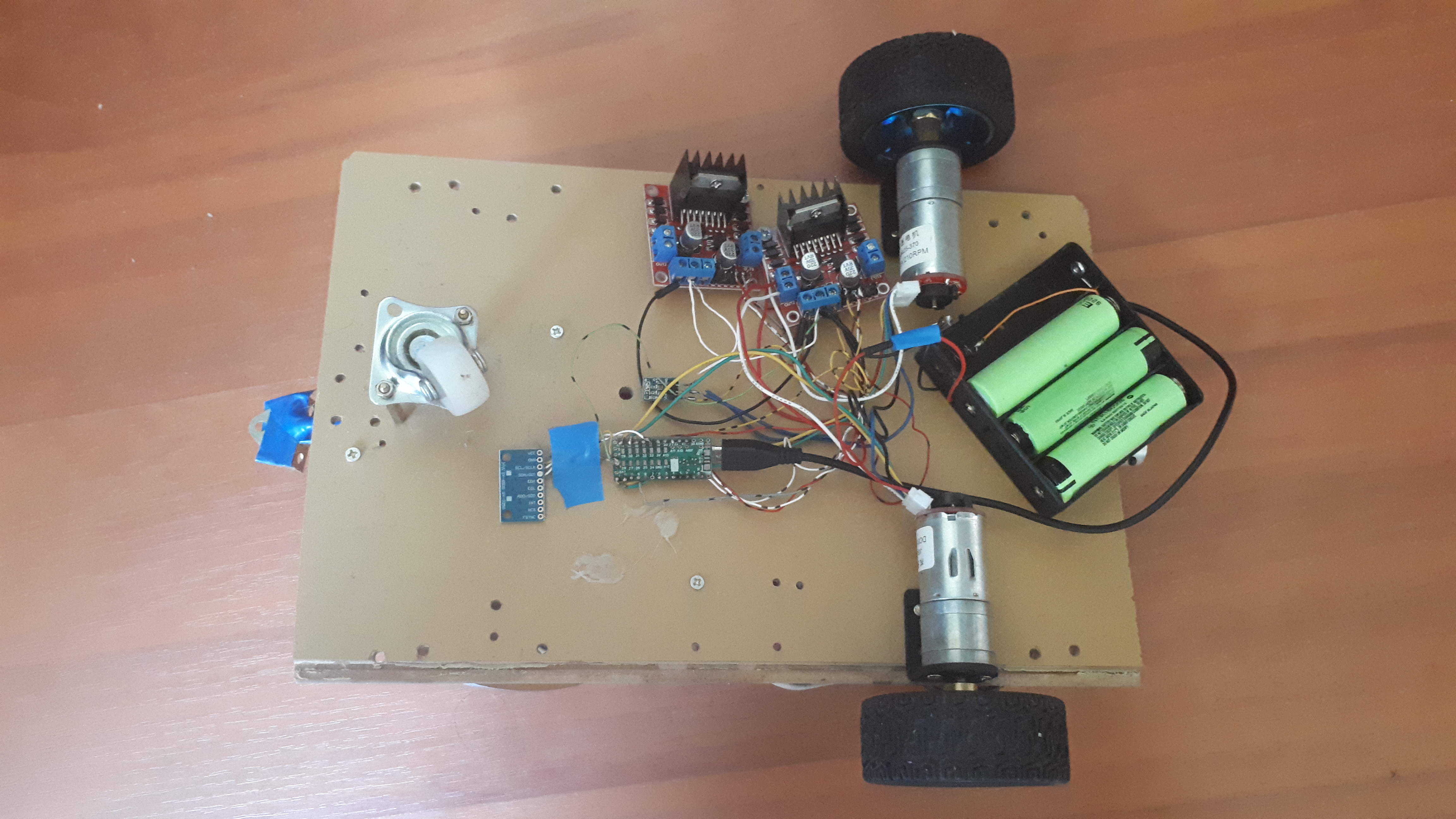
المجموع: ١٧١٦٠ ص.* يمكن تخفيض التكلفة عن طريق استبدال teenzy بـ arduino mega 2560 (600 ص.) ، والليدار عن طريق استبدال kinect v.1 (1000 ص): ومع ذلك ، تجدر الإشارة إلى أن kinect الأول لديه الحد الأدنى من الرؤية (المنطقة العمياء) 0.5 م ، والتي يمكن أن تؤثر سلبًا على الملاحة في ظروف ضيقة وهي كبيرة الحجم إلى حد ما. يحتوي الليدار على منطقة عمياء أقل من 0.2 م.لن يتناسب Kinect v.2 مع التوت 3 ب (لا يحتوي على USB 3.0). Arduino mega أدنى من المراهق في الحجم (وبعض الخصائص) ، بالإضافة إلى ذلك ، سيكون عليك إعادة صياغة الرمز قليلاً.بشكل عام ، يبدو "التصميم" كالتالي:
ومع ذلك ، تجدر الإشارة إلى أن kinect الأول لديه الحد الأدنى من الرؤية (المنطقة العمياء) 0.5 م ، والتي يمكن أن تؤثر سلبًا على الملاحة في ظروف ضيقة وهي كبيرة الحجم إلى حد ما. يحتوي الليدار على منطقة عمياء أقل من 0.2 م.لن يتناسب Kinect v.2 مع التوت 3 ب (لا يحتوي على USB 3.0). Arduino mega أدنى من المراهق في الحجم (وبعض الخصائص) ، بالإضافة إلى ذلك ، سيكون عليك إعادة صياغة الرمز قليلاً.بشكل عام ، يبدو "التصميم" كالتالي:
 ليس هناك جمال هنا ، بالطبع ، لكن هذا ليس حوله.بالإضافة إلى الروبوت نفسه ، من المستحسن للغاية أن يكون لديك جهاز كمبيوتر خارجي يتم فيه إطلاق قذائف رسومية لتصور إجراءات الروبوت (rviz ، gazebo).
ليس هناك جمال هنا ، بالطبع ، لكن هذا ليس حوله.بالإضافة إلى الروبوت نفسه ، من المستحسن للغاية أن يكون لديك جهاز كمبيوتر خارجي يتم فيه إطلاق قذائف رسومية لتصور إجراءات الروبوت (rviz ، gazebo).تجميع الروبوت
تم رسمه بالتفصيل على موقع المشروع - رابط ، لذلك دعونا نتحدث عن النقاط التي تسبب صعوبات. أولاً ، يجب أن تضع في اعتبارك أن الترميز الموجود على العجلات يتم تشغيله بجهد 3.3 فولت ، وعندما يتم تطبيق 5V ، يفشل تمامًا.تم تثبيت البرنامج النصي لتثبيت linorobot بنجاح على أوبونتو 16.04 ، أوبونتو 18.04. إصدارات ROS: ROS الحركية أو ROS لحني. في raspberry 3b ، يجب عليك أولاً إنشاء ملف مبادلة.رمز المراهق الرئيسي هو على طول الطريق:roscd linorobot/teensy/firmware/lib/config
nano lino_base_config.h
وسكب عليها الأمر:roscd linorobot/teensy/firmware
platformio run --target upload
سيتم استخدام حزم الأوامر المذكورة أعلاه في كثير من الأحيان ، لذلك من المنطقي إضافتها إلى الأسماء المستعارة.بسبب الصعوبات في تجميع الروبوت ، يمكن أن يكون الارتباط الصحيح لجهات الاتصال المتصلة التي تنتقل من l298n إلى teenzy مزعجًا. على الرغم من مخطط الاتصال الواضح للغاية ، يمكن أن تتصرف العجلات بشكل مختلف ويجب أن تجرب ، باختيار تعيين الدبوس الصحيح في الرمز.في حالتي ، اتضح مثل هذا:/// ENCODER PINS
//MOTOR PINS
النقطة الثانية هي وصف مواصفات عجلات الروبوت://define your robot' specs here
#define MAX_RPM 210 // motor's maximum RPM
يمكن العثور على العائد لكل ألف ظهور في مواصفات العجلة ، ولكن CPR (COUNTS_PER_REV) هي القيمة المحسوبة.CPR = PPR × 4. طاعون المجترات الصغيرة من عجلاتنا 341.* يمكن عرض PPR في المواصفات أو تشغيل الكود على roslaunch linorobot Mineal_runch robot وتدور العجلة 360 درجة. سيكون PPR مساويًا للقيمة العددية التي سيتم عرضها على الشاشة بعد تدوير العجلة: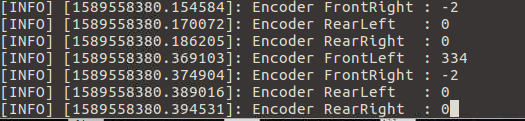 * PPR = القيمة المطلقة (RECENT_COUNT - INITIAL_COUNT).لذا CPR = 1364. تحتاج أيضًا إلى تعيين WHEEL_DIAMETER و LR_WHEELS_DISTANCE بالأمتار. علاوة على ذلك ، LR_WHEELS_DISTANCE هي المسافة بين المحاور المركزية للعجلات ، وليس من حافة إلى أخرى. يمكن تجاهل المؤشرات الأخرى إذا كان الروبوت ذو عجلتين وتفاضلي (وليس كليًا).النقطة الثالثة التي يمكن أن تسبب صعوبات - معايرة imu. للقيام بذلك ، باتباع التعليمات ، من الضروري إصلاح الروبوت في مواقف معينة. ستكون التلميحات في التعليمات البرمجية عند تنفيذ البرنامج النصي rosrun imu_calib do_calib :
* PPR = القيمة المطلقة (RECENT_COUNT - INITIAL_COUNT).لذا CPR = 1364. تحتاج أيضًا إلى تعيين WHEEL_DIAMETER و LR_WHEELS_DISTANCE بالأمتار. علاوة على ذلك ، LR_WHEELS_DISTANCE هي المسافة بين المحاور المركزية للعجلات ، وليس من حافة إلى أخرى. يمكن تجاهل المؤشرات الأخرى إذا كان الروبوت ذو عجلتين وتفاضلي (وليس كليًا).النقطة الثالثة التي يمكن أن تسبب صعوبات - معايرة imu. للقيام بذلك ، باتباع التعليمات ، من الضروري إصلاح الروبوت في مواقف معينة. ستكون التلميحات في التعليمات البرمجية عند تنفيذ البرنامج النصي rosrun imu_calib do_calib : بعد الانتهاء من إنشاء imu_calib.yaml مع الإعدادات.من الأفضل إجراء المعايرة ، على الرغم من وجود ملف افتراضي بإعدادات imu.* بالإضافة إلى ذلك ، تبين أن المعايرة imu يمكن أن تؤثر على اتجاه حركة الروبوت من خلال teleop (اليسار بدلاً من اليمين والعكس صحيح ، بينما كانت الحركة ذهابًا وإيابًا صحيحة). لم يتم حل الموقف بإعادة ترتيب المسامير في الكود. تم إصلاح ومعايرة Imu نفسها بأقواس مقلوبة ، مثل ثابتة على الجزء الخلفي من قاعدة الروبوت. له (imu) المزيد من الوجه دون إعادة المعايرة حل المشكلة.النقطة الرابعة - معايرة pid.على موقع المشروع ، يتم وصف إجراء تنفيذ التعديل بالتفصيل - رابط .ومع ذلك ، سيكون من الصعب على المبتدئ معرفة ما هو وكيفية العمل معه. بشكل عام ، هناك حاجة إلى تنظيم pid لضمان تحرك الروبوت بشكل موحد ، دون الرجيج / الكبح المفاجئ. المعلمات الثلاث هي المسؤولة عن هذا: ص ، ط ، د. يتم تضمين قيمهم في الرمز الرئيسي الذي تم تحميله إلى teenzy:
بعد الانتهاء من إنشاء imu_calib.yaml مع الإعدادات.من الأفضل إجراء المعايرة ، على الرغم من وجود ملف افتراضي بإعدادات imu.* بالإضافة إلى ذلك ، تبين أن المعايرة imu يمكن أن تؤثر على اتجاه حركة الروبوت من خلال teleop (اليسار بدلاً من اليمين والعكس صحيح ، بينما كانت الحركة ذهابًا وإيابًا صحيحة). لم يتم حل الموقف بإعادة ترتيب المسامير في الكود. تم إصلاح ومعايرة Imu نفسها بأقواس مقلوبة ، مثل ثابتة على الجزء الخلفي من قاعدة الروبوت. له (imu) المزيد من الوجه دون إعادة المعايرة حل المشكلة.النقطة الرابعة - معايرة pid.على موقع المشروع ، يتم وصف إجراء تنفيذ التعديل بالتفصيل - رابط .ومع ذلك ، سيكون من الصعب على المبتدئ معرفة ما هو وكيفية العمل معه. بشكل عام ، هناك حاجة إلى تنظيم pid لضمان تحرك الروبوت بشكل موحد ، دون الرجيج / الكبح المفاجئ. المعلمات الثلاث هي المسؤولة عن هذا: ص ، ط ، د. يتم تضمين قيمهم في الرمز الرئيسي الذي تم تحميله إلى teenzy:
يمكنك تجربتها عن طريق التشغيل على الروبوت:roslaunch linorobot minimal.launch
علاوة على الكمبيوتر الخارجي في ثلاث محطات مختلفة:rosrun lino_pid pid_configure
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
rqt
من خلال تحريك منزلقات p ، d ، i في محطة rqt ، ومن ثم التحكم في الروبوت في محطة teleop_twist_keyboard ، يمكنك تحقيق النتائج الضرورية دون الحاجة إلى تنزيل الكود بمعلمات pid الجديدة في كل مرة في سن المراهقة: أي أن كل شيء يحدث على الطاير وفي ذلك الوقت في البرامج الثابتة قد يكون للمراهق معاني مختلفة تمامًا. * لا يمكنك التركيز على المخططات لأنه بصريًا ، وبالتالي سيتم فهم كيف يسير الروبوت.يوصون بالبدء بتحديد القيم p = 1.0 ، d = 0.1 ، i = 0.1. في حالتنا ، تكون القيم على النحو التالي (تم الحصول عليها تجريبيًا) p = 2.0 ، i = 0.3 ، d = 0.1.بعد ذلك ، يجب تعيين هذه القيم في التعليمات البرمجية وملؤها في سن المراهقة.أيضًا ، لا تنس تعيين الرمز (DEBUG 0 بدلاً من DEBUG 1):
أي أن كل شيء يحدث على الطاير وفي ذلك الوقت في البرامج الثابتة قد يكون للمراهق معاني مختلفة تمامًا. * لا يمكنك التركيز على المخططات لأنه بصريًا ، وبالتالي سيتم فهم كيف يسير الروبوت.يوصون بالبدء بتحديد القيم p = 1.0 ، d = 0.1 ، i = 0.1. في حالتنا ، تكون القيم على النحو التالي (تم الحصول عليها تجريبيًا) p = 2.0 ، i = 0.3 ، d = 0.1.بعد ذلك ، يجب تعيين هذه القيم في التعليمات البرمجية وملؤها في سن المراهقة.أيضًا ، لا تنس تعيين الرمز (DEBUG 0 بدلاً من DEBUG 1):
قياس المسافات
لتوجيه الروبوت والملاحة اللاحقة ، يتم استخدام بيانات lidar وبيانات imu و encoder. إذا تم إجراء معايرة imu بشكل صحيح ، يتم تثبيت الليدار بشكل صحيح ، وتكون قيم التشفير صحيحة ، فيجب ألا تكون هناك مشاكل في قياس المسافات.للتحقق من صحة odometry ، تحتاج إلى الركوب قليلاً على الروبوت عبر teleop ورؤية القيم في موضوع odom ، وهذا مكتوب على صفحة المشروع - رابط .وانظر أيضًا في الغلاف البصري لـ rviz: خلية واحدة في rviz هي 1 متر ، لذا فمن المستحسن أن يقوم الروبوت بتمرير هذا العداد في المحرر المرئي والعيني أيضًا.بالإضافة إلى ذلك ، يتم عرض المسافة المقطوعة في المؤشر ث:
خلية واحدة في rviz هي 1 متر ، لذا فمن المستحسن أن يقوم الروبوت بتمرير هذا العداد في المحرر المرئي والعيني أيضًا.بالإضافة إلى ذلك ، يتم عرض المسافة المقطوعة في المؤشر ث: يجب أن تميل أيضًا إلى 1 م.وينطبق الشيء نفسه على زوايا دوران الروبوت:
يجب أن تميل أيضًا إلى 1 م.وينطبق الشيء نفسه على زوايا دوران الروبوت: * في rviz والعيش ، يجب أن يدور الروبوت في نفس الزوايا.يتم تحديد قياس المسافات من ليدار بطريقة مماثلة - ارتباط. يجب أن تتطابق المسافة من ليدار إلى أقرب جدار مباشر وفي رفيز.
* في rviz والعيش ، يجب أن يدور الروبوت في نفس الزوايا.يتم تحديد قياس المسافات من ليدار بطريقة مماثلة - ارتباط. يجب أن تتطابق المسافة من ليدار إلى أقرب جدار مباشر وفي رفيز.TF
في ROS ، يتم إيلاء اهتمام خاص للتحولات - tf. بشكل عام ، يصف هذا المفهوم ارتباط الأشياء بالنسبة لبعضها البعض في الفضاء. حتى لا تتدلى الأشياء في الهواء ، ويفهم البرنامج كيف يتم تقديمها بالنسبة لبعضها البعض ، فمن الضروري الانتباه إلى إعداد tf.في المشروع ، تم تكوين جميع اتصالات tf بالفعل بالنسبة لبعضها البعض وتحتاج فقط إلى ضبط المؤشرات ، على سبيل المثال ، الإشارة إلى كيفية وجود lidar. يعد ذلك ضروريًا لفهم الروبوت أن العائق لم يبرز مباشرة أمامه ، ولكن أمام الليدار ، الذي يتم فصله عن مركز الروبوت على مسافة معينة.دعنا نذهب إلى الدليل المناسب:roscd linorobot/launch
nano bringup.launch
تقع القاعدة نفسها على مسافة 0.065 م من الأرضية:<node pkg="tf_ros" type="static_transform_publisher" name="base_footprint_to_base_link" args="0 0 0.065 0 0 0 /base_footprint /base_link "/>
في laser_runch ، تحتاج إلى تعيين موقع الليدار بالنسبة لمركز قاعدة الروبوت:roscd linorobot/launch/include
nano laser.launch
في حالتي ، يتم تحريك الليدار على طول المحور x: -0.08 ، y: 0.04 و "الارتفاعات" فوق القاعدة (المحور z): 0.08 م:<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_laser"
args="-0.08 0.04 0.08 0 0 0 /base_link /laser "/>
في rviz ، يمكن ملاحظة هذا الموقع بصريًا: في حين أنه ليس بعيدًا عن الليدار ، قم بتعديل تردده بحيث يعطي المزيد من النقاط (بشكل افتراضي يعطي 4k) ، سيساعد ذلك في بناء الخريطة:
حين أنه ليس بعيدًا عن الليدار ، قم بتعديل تردده بحيث يعطي المزيد من النقاط (بشكل افتراضي يعطي 4k) ، سيساعد ذلك في بناء الخريطة:cd linorobot/launch/include/lidar
nano rplidar.launch
إضافة معلمة:<param name="scan_mode" type="string" value="Boost"/>
والتغيير<param name="angle_compensate" type="bool" value="false"/>
الآن 8k تحت تصرفنا: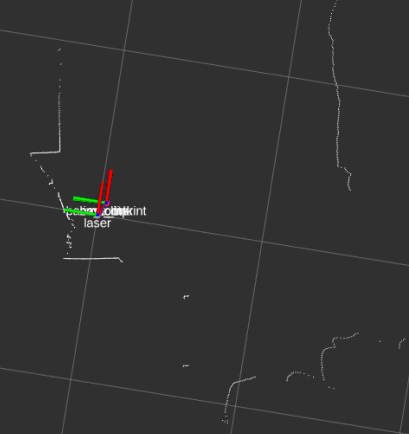 الموقع المادي لليدار على الروبوت مهم أيضًا:
الموقع المادي لليدار على الروبوت مهم أيضًا: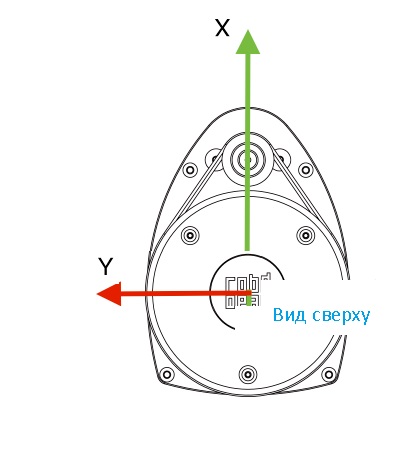
بناء خريطة غرفة ثنائية الأبعاد
يقترح على موقع المشروع إنشاء خريطة غرفة من خلال الإطلاق في محطتين:roslaunch linorobot bringup.launch
roslaunch linorobot slam.launch
ومع ذلك ، فقد أظهرت الممارسة أن slam ، الذي يأتي مع المشروع بشكل افتراضي ، يرفض العمل عندما يكون وضع lidar هو 8k: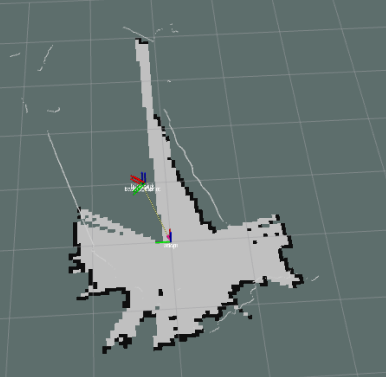 بينما في وضع 4K ، لا تكون البطاقات ناجحة للغاية ، فهي صاخبة للغاية.لذلك ، من الأفضل استخدام ضربة سلام أخرى - hector-slam.يشار إلى كيفية تثبيته هنا .بعد التثبيت ، سيكون إجراء بناء الخريطة هو نفسه ، ولكن بدلاً من roslaunch linorobot slam.co.unch ، قم بتشغيل roslaunch my_hector_mapping my_launch_runch.الخرائط أكثر نظافة ، ولكن من الأفضل تنقيحها في محرر رسومي ، وإزالة الخرائط غير الضرورية ، خاصة إذا واجه ليدار المرايا عند بناء الخريطة :
بينما في وضع 4K ، لا تكون البطاقات ناجحة للغاية ، فهي صاخبة للغاية.لذلك ، من الأفضل استخدام ضربة سلام أخرى - hector-slam.يشار إلى كيفية تثبيته هنا .بعد التثبيت ، سيكون إجراء بناء الخريطة هو نفسه ، ولكن بدلاً من roslaunch linorobot slam.co.unch ، قم بتشغيل roslaunch my_hector_mapping my_launch_runch.الخرائط أكثر نظافة ، ولكن من الأفضل تنقيحها في محرر رسومي ، وإزالة الخرائط غير الضرورية ، خاصة إذا واجه ليدار المرايا عند بناء الخريطة : لا تنسى حفظ خريطة الغرفة:
لا تنسى حفظ خريطة الغرفة:rosrun map_server map_saver -f my-map
* يتم الحصول على الخرائط بشكل أفضل في الشفق اللطيف ، وهذا سيضغط إلى أقصى حد من ميزانية الميزانية.يتبع.