نواصل دراسة المنطق الضبابي وفقًا لكتاب V. Gostev ، "وحدات التحكم الضبابية في أنظمة التحكم التلقائي". بعد أن استمتعنا بالمناظر الجميلة لأسطح الاستجابة ، ننتقل مباشرةً إلى حل المشكلة التالية من كتاب V. Gostev "وحدات التحكم الغامضة في أنظمة التحكم التلقائي".
هذا النص هو استمرار للمنشورات السابقة:
- وحدة تحكم بسيطة تعتمد على المنطق الضبابي. الإنشاء والتخصيص.
- منطق غامض في صور جميلة. أسطح الاستجابة لوظائف العضوية المختلفة.
- إنشاء وحدة تحكم على أساس منطق غامض مع إعدادات متعددة القنوات.
- يتم تشكيل المنطق الضبابي البسيط "من ما كان" لمحرك التوربينات الغازية.
- منطق غامض ضد PID. نعبر القنفذ والثعبان. محرك الطائرات وخوارزميات التحكم NPP.
بالنسبة لأولئك الذين ليسوا على دراية بالمنطق الضبابي ، أوصيك بقراءة النص الأول أولاً ، بعد ذلك ، سيكون كل ما هو موضح أدناه بسيطًا وواضحًا.
, - . , . , Fuzzy. , , . , , , , .
, , , .
– -, (). , , « . »
, , , 1 ( ).
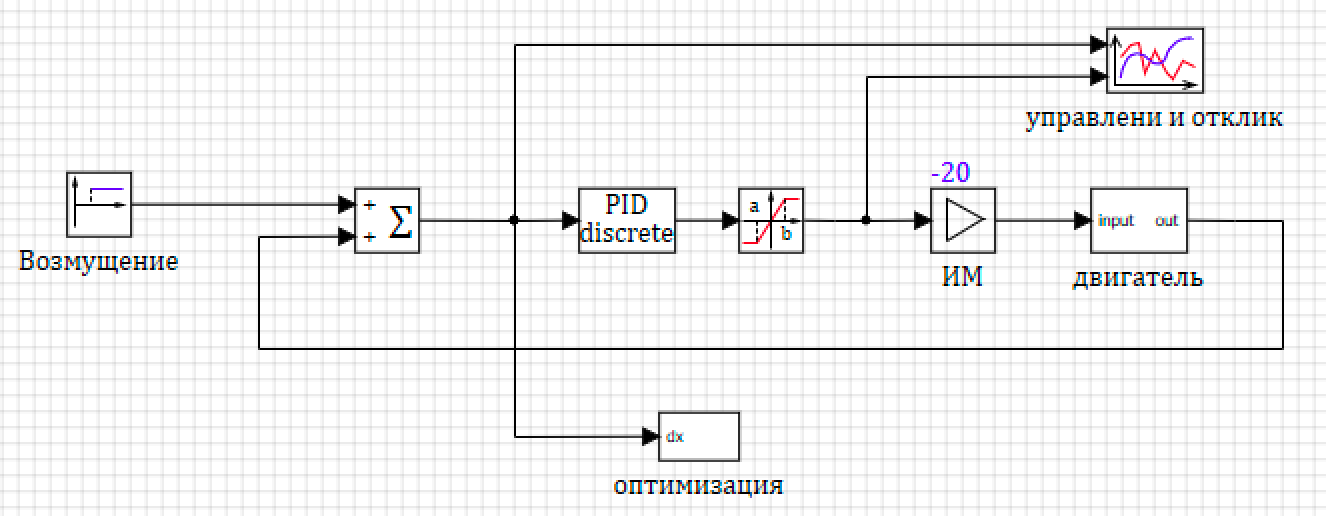
1. .
.
. 1 . , . – , .
: – , – . , 0.009 .
, -.
, 2. – 20, (- «as is» .. ).
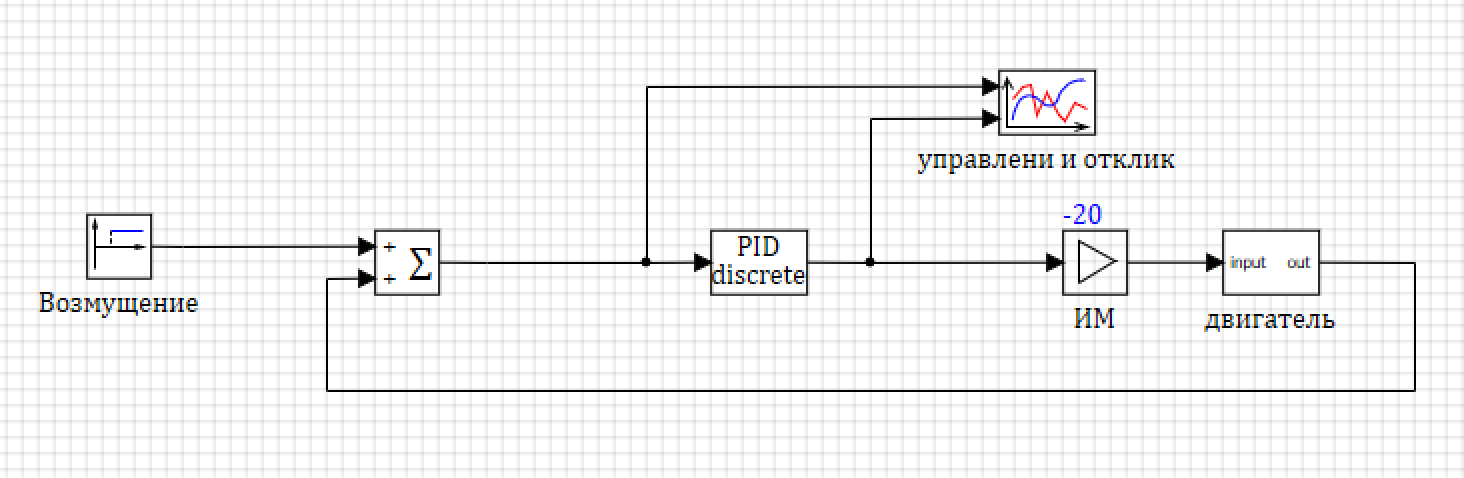
2. .
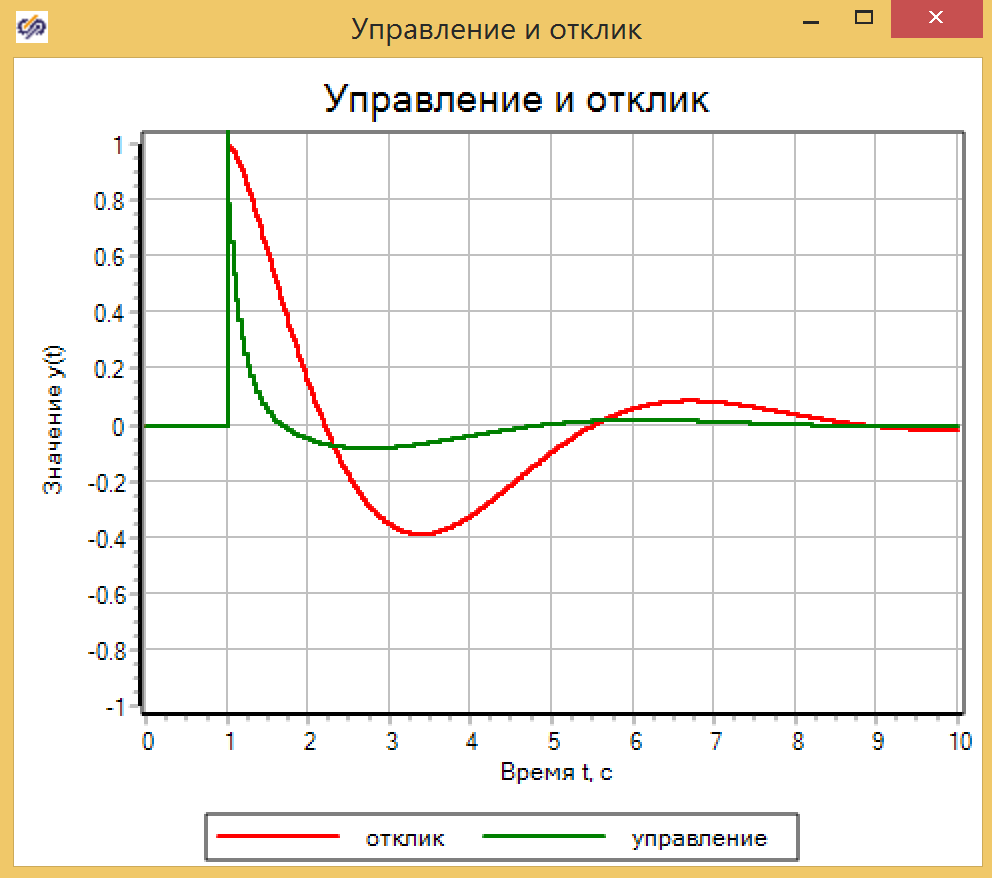
- 0.001 0.001.
- 1,1,1 . 3.
, , 1 1000, 0,001. , . , -1 1 , 0 7 .
ماذا يمكنك أن تقول بالنظر إلى هذا الرسم البياني؟ لا يهم. وكل ذلك لأن نموذجنا مقدم بالفعل كدالة نقل في الانحرافات ، ولا يمكننا أن نقول ما إذا كان سريعًا أم لا. لا يمكننا قول أي شيء عن المحرك. كما بينت بالفعل في مقالة "التكنولوجيا للحصول على معادلات ديناميكية من TAU. ولماذا يعتبر تعريف النظام أمرًا سيئًا ، وقواعد "الفيزياء الصادقة" : تحول النظام المادي المعلمي إلى نوع من وظيفة النقل يدمر "قابلية" فهم الهندسة الكاملة للنموذج.على سبيل المثال ، هل التأثير على نموذج بقيمة 1000 تم الحصول عليه بعد PID ممكن في الحياة؟ مجهول إذا كان هذا مصدر وقود ، فمن الواضح أن نظام الإمداد لن يكون قادرًا على حشر 1000 مرة وقود أكثر من وضع الخمول., 10, -10. . , . :

4. .
, , ( 5). 1000, , 10.
5. .
.
C . 0
6. .
7.
 7. ..
7. ... :
— – , 0.009.
— .
«-3» . , , , — .
« » .
, , . , .
, « » , , .. .
, , . , .
, . , , , .
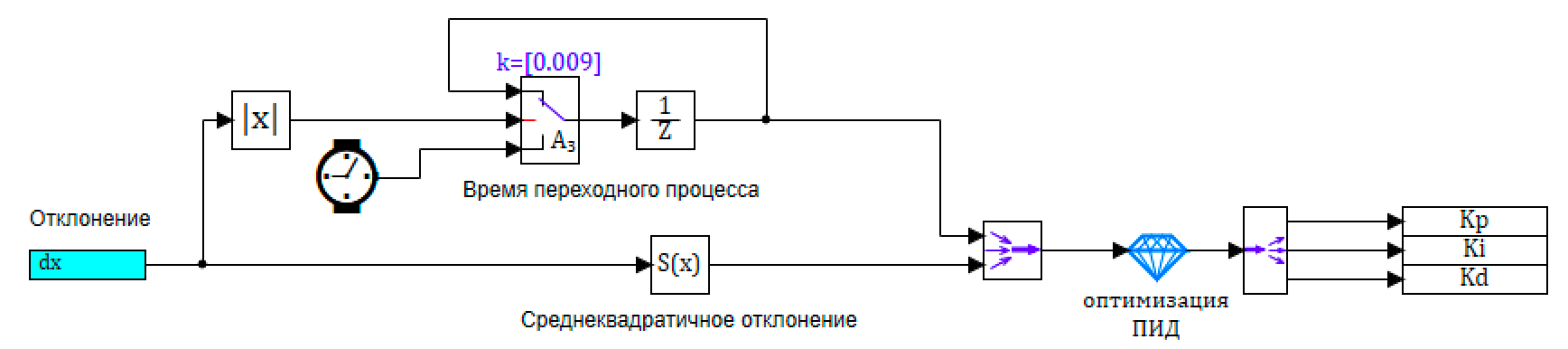
8.

8. .
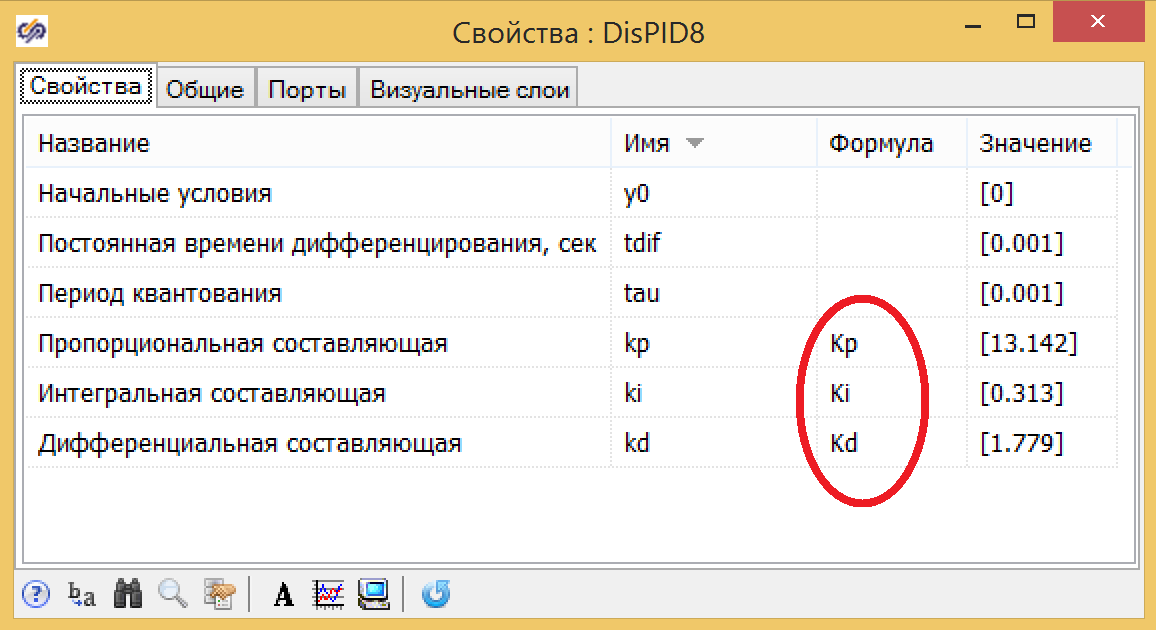
. , , . p, Ki, Kd (. . 7 . 8). -. (. 10.)
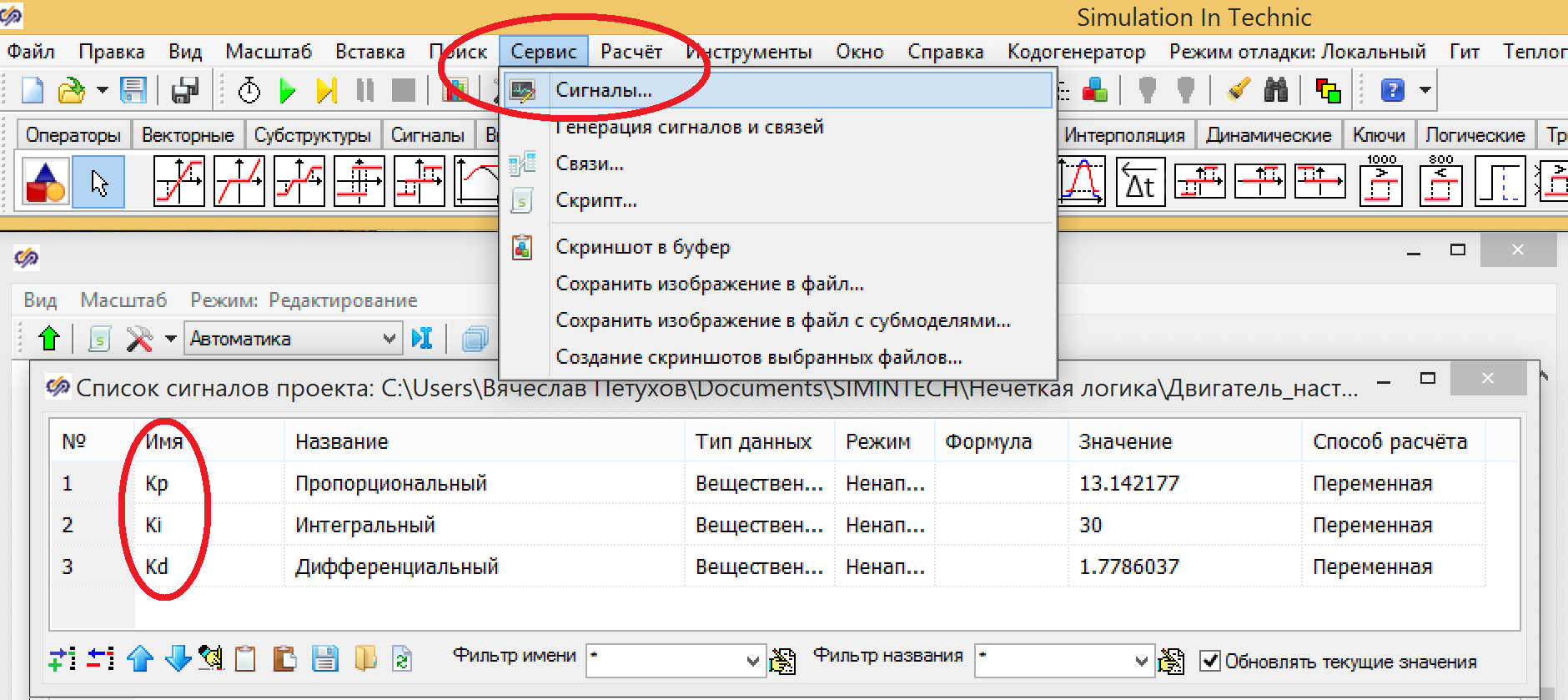
9. .
10. -.
:
Kp = 13.142
Ki = 0.313
Kd = 1.779
0.72 . 11.

11. -.
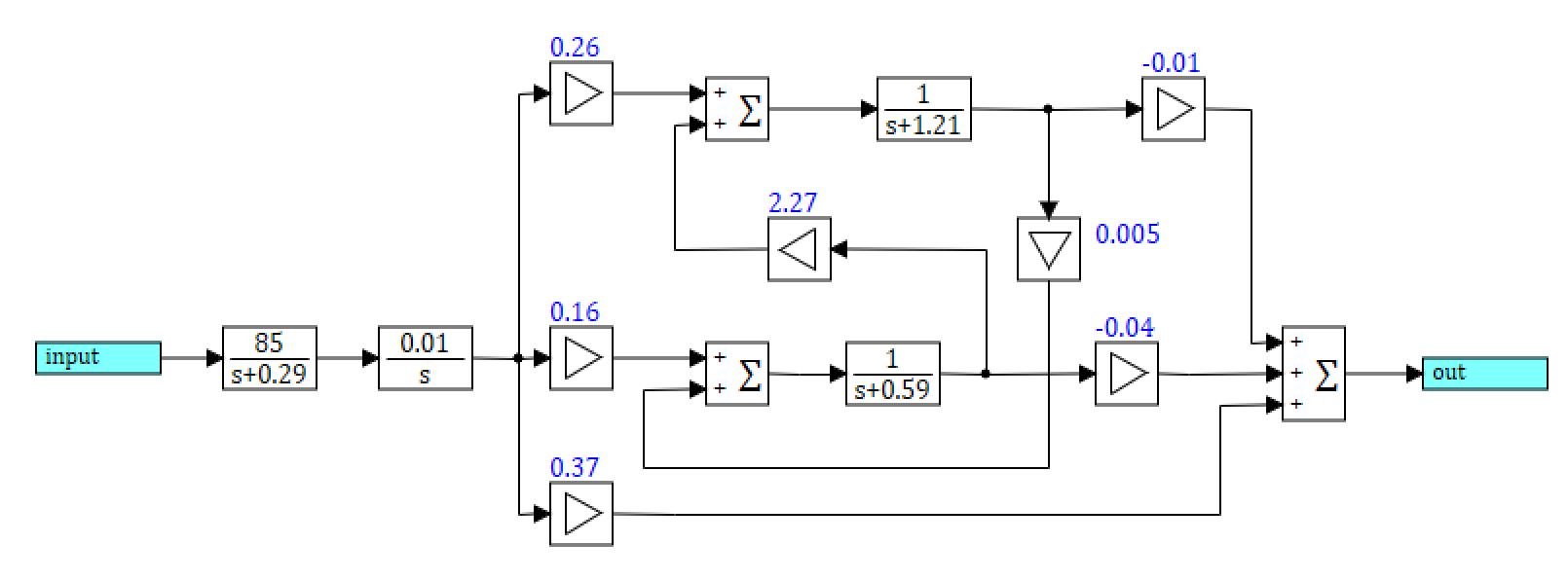
, .
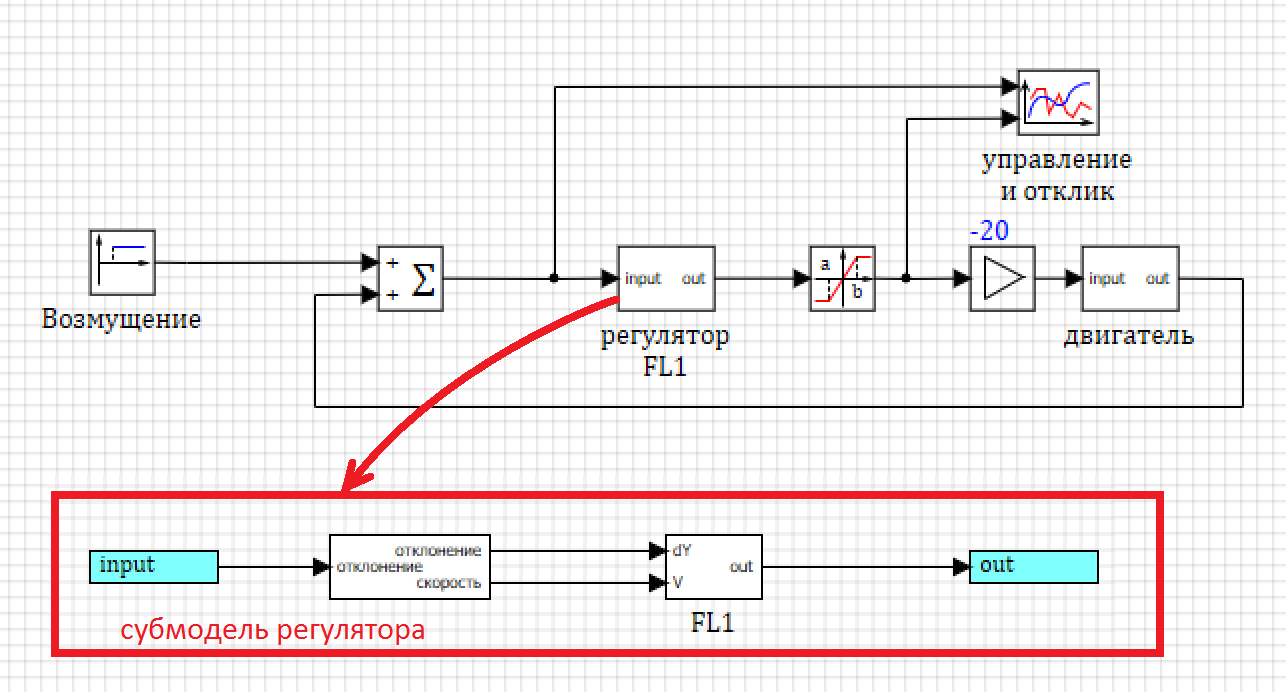
1 , . .
تتحلل إشارات الانحراف الواردة ومعدل اختلاف الانحراف ، الذي يمر عبر وحدات الطور ، إلى ثلاثة مصطلحات لكل منهما. استخدام وظائف عضوية Gauss.
الانحراف - أكثر ، عادي ، أقل .معدل التغير و تنمو ، لا تغيير ، هبوط .سيعطي المنظم تأثيرًا عند ظهور الانحراف ، وكذلك عندما يشير معدل تغيير المنظم إلى أن الانحراف سيزداد (حتى لو كان طبيعيًا في الوقت الحالي). القواعد الأساسية للمنظم:
- ( (0) ), .
- , 0.
- ( (0) ), .
, , 12.

12. Fuzzy Logic.
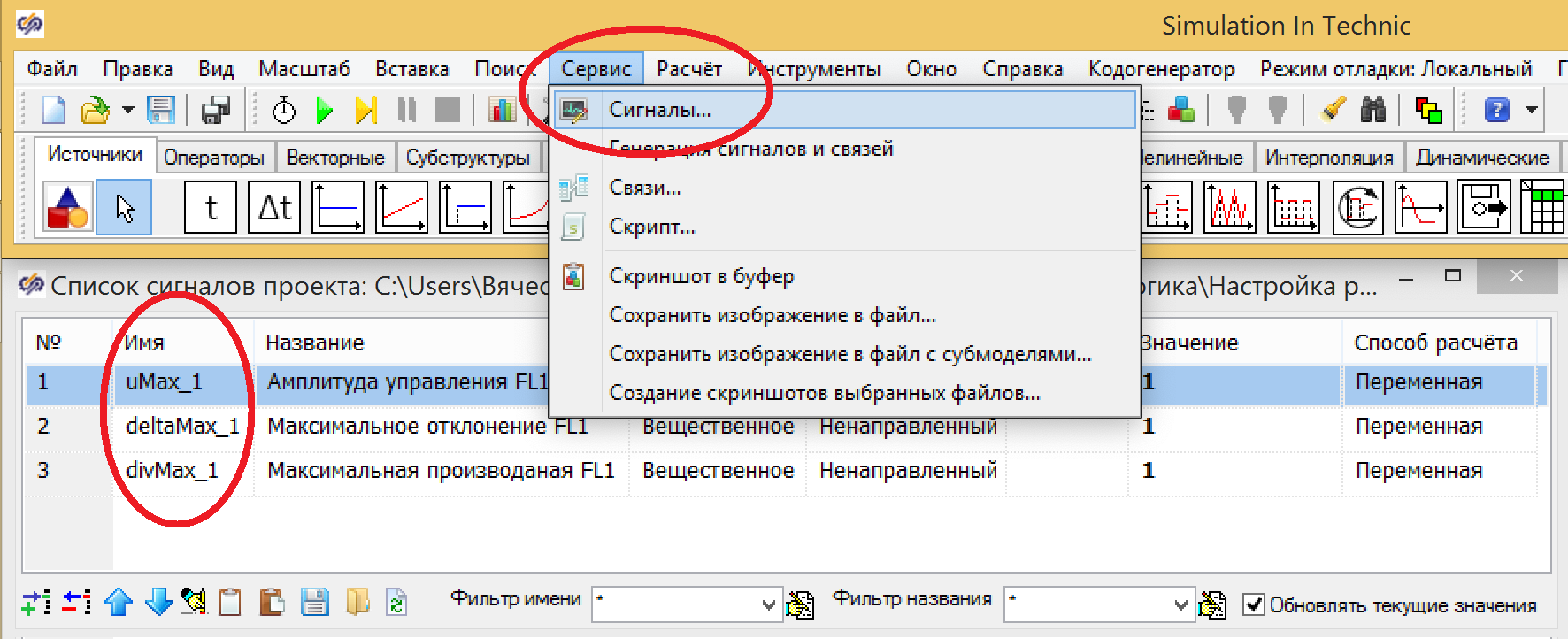
. , 0, . :
- uMax_1 – ;
- deltaMax_1 – ;
- divMax_1 – .
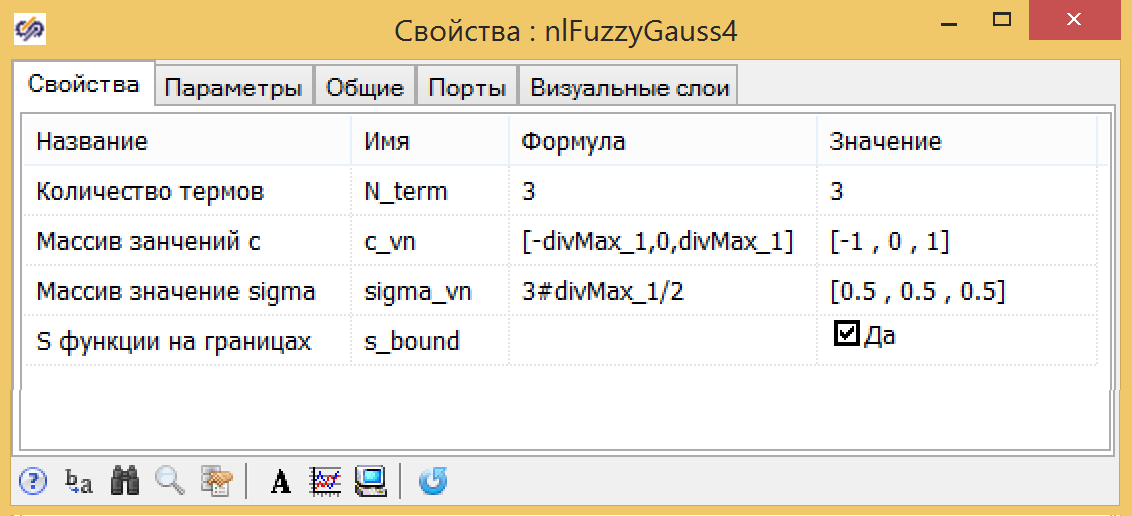
– . 13.
13. .
(–uMax_1… uMax_1) [–uMax_1 ,0, uMax_1], , 2. (. , ).
, :
 14. .
14. ..
, :
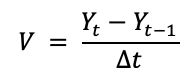 حيث:Y t هي القيمة الحالية ؛Y t-1 هي القيمة في الخطوة السابقة ؛Δt = 0.001 - الخطوة الزمنية هي نفسها عند أخذ عينات وحدة تحكم PID منفصلة.
حيث:Y t هي القيمة الحالية ؛Y t-1 هي القيمة في الخطوة السابقة ؛Δt = 0.001 - الخطوة الزمنية هي نفسها عند أخذ عينات وحدة تحكم PID منفصلة.تظهر الدائرة في الشكل 15. يتم أخذ القسمة بواسطة Δt في الاعتبار في كتلة المقارنة ، حيث يمكن تعيين المعاملات لكل إدخال.
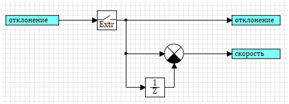
الشكل 16. مخطط لحساب معدل التغيير.
نظرًا لأن الدائرة بأكملها جاهزة لنا ، يبقى استبدال وحدة تحكم PID بوحدة تحكم FL (انظر الشكل 17) ومعرفة ما يحدث.
الشكل 17. رسم تخطيطي لنموذج مع وحدة تحكم غامض واحد.
ومرة أخرى ، لدهشتي الكبيرة ، كان أداء وحدة التحكم الغامضة أفضل من PID في الإعدادات الأولية الأولية. يتم الحصول على نوع من الدعاية المستمرة للمنطق الضبابي.
علاوة على ذلك ، إذا كان في حالات سابقة يمكن أن يعزى ذلك إلى حقيقة أن المشتق الثاني يستخدم في وحدة التحكم الغامضة ، في هذه الحالة يستخدم جهاز التحكم الغامض نفس المشتق ، ويستخدم PID أيضًا المكون المتكامل.
حتى لا يتهمني دعاة التنوع بين الجنسين بقمع وحدات التحكم PID التقليدية ، يتم إلغاء معامل المكون المتكامل ويتم الحصول على وحدة تحكم PD. تحسنت النتيجة بشكل ملحوظ ، لكن FL ما زال أفضل.
الشكل 19. الشكل PD تحكم مع إعدادات واحدة.
, 0.009. :
– 11.25 .
— 5.25 .
FL – 4.74 .
FL
, - (. 6). :
— uMax_1 – ;
— deltaMax_1 – ;
— divMax_1 – .
1. .
, .
20. .
, , .
. .
 21. .
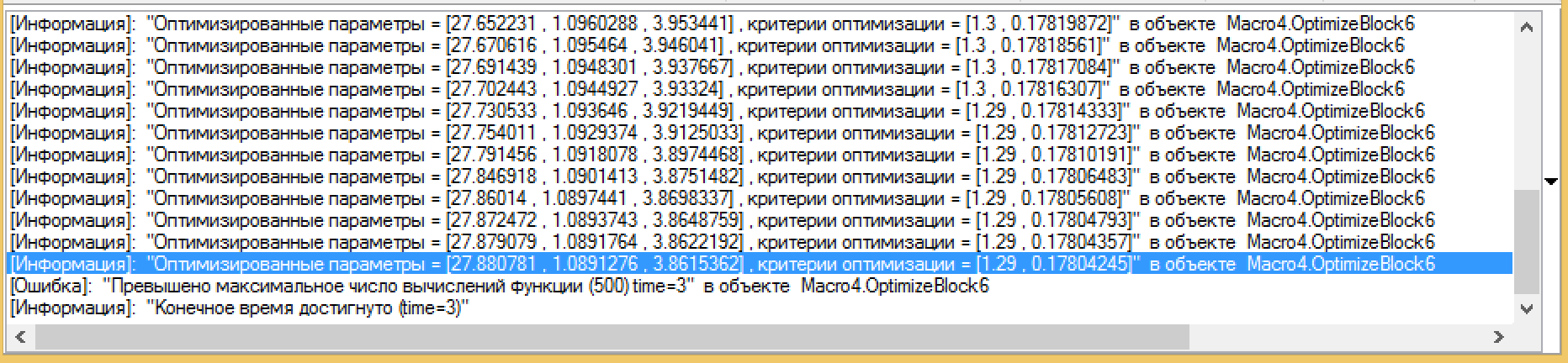
21. .0.24
[]: « = [31.10359, 1.0219553, 2.165446], = [1.24, 0.09879439]» Macro4.OptimizeBlock6
0.23 .
[]: « = [34.954824, 1.0114662, 0.058949452], = [1.23, 0.098544697]» Macro4.OptimizeBlock6
FL 22. , .
, .
, . . , , , .
, , , .
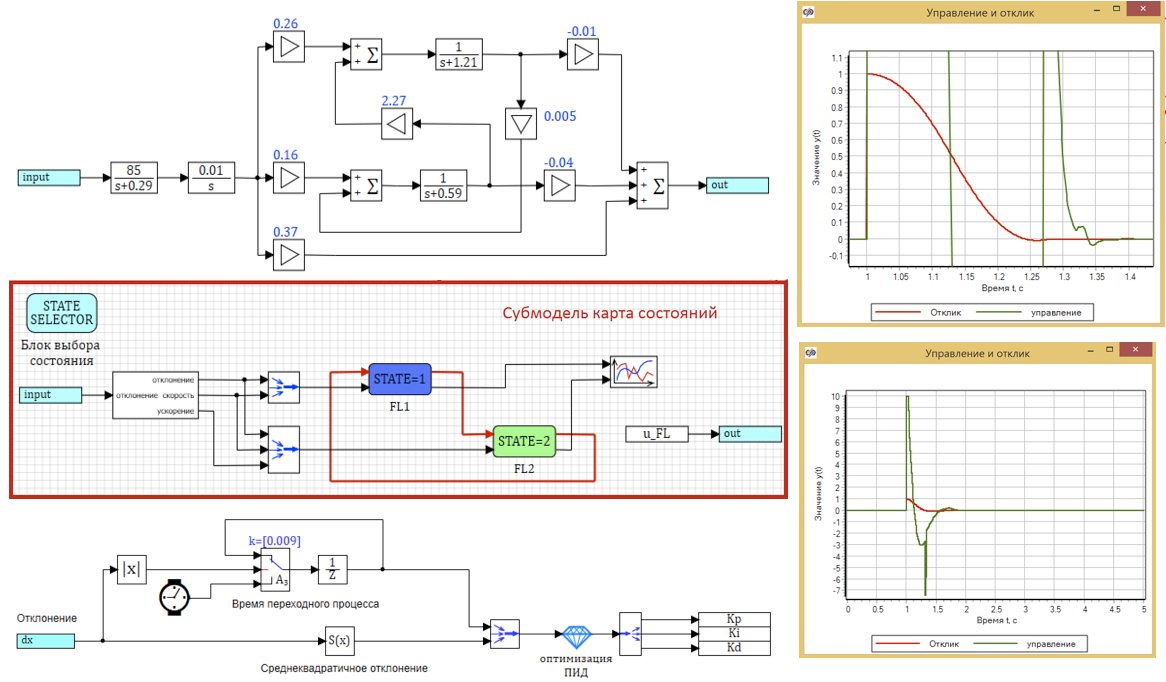
. – SimInTech, - , .
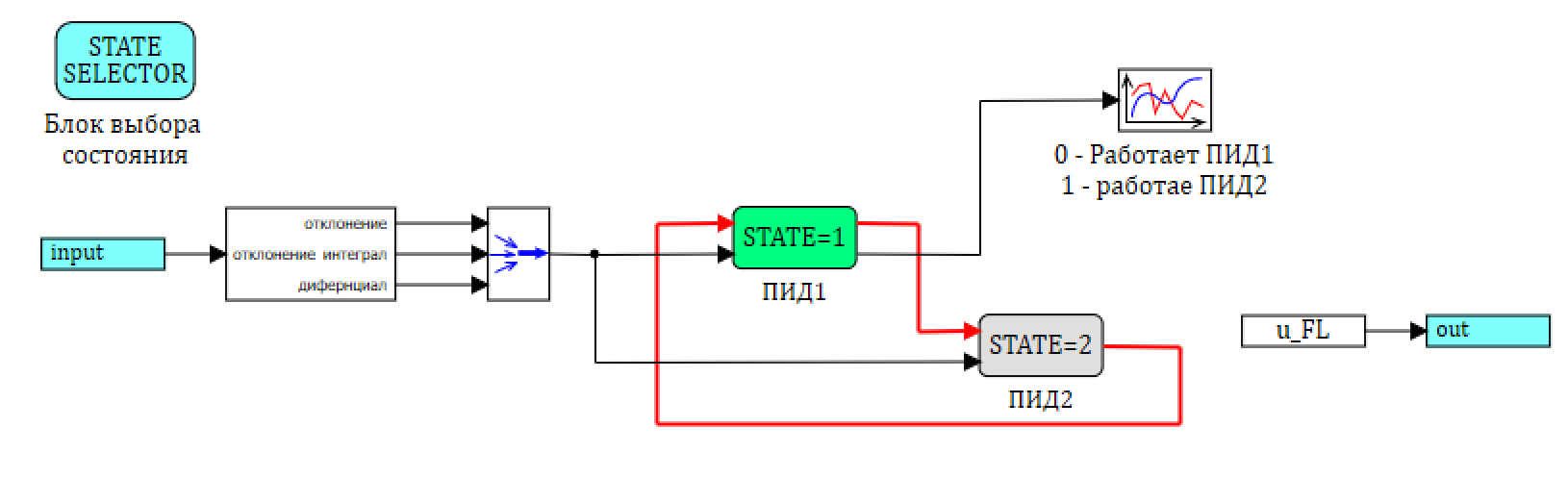
. . – FL1, — FL2. , 23:
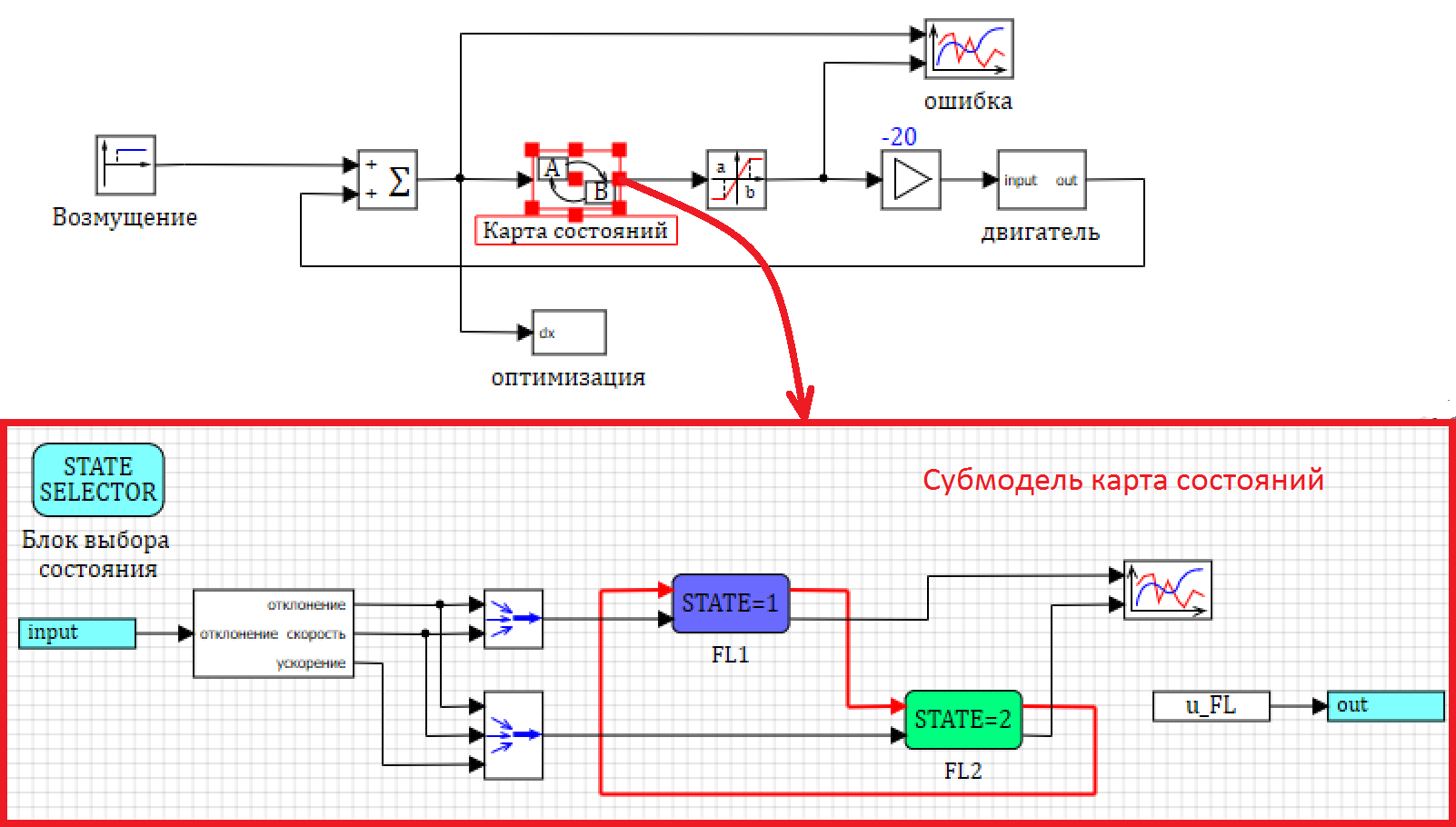
23. .
, , – , .
, .
, , , , . .
, , , «1 », , 0.001 ( ). . — .
, , , (), . , , 1000 , 1 000 000 . . . 24.
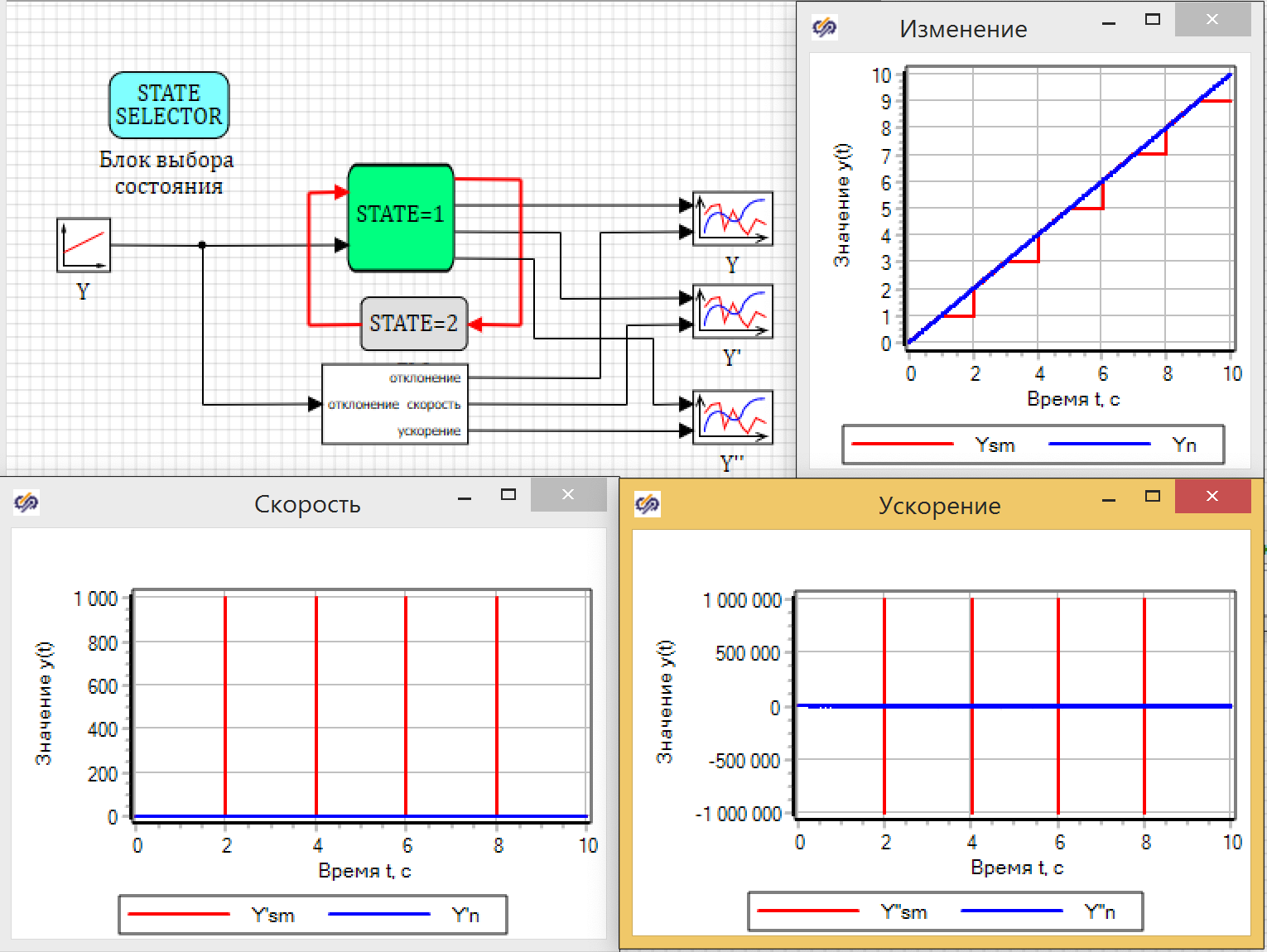
24. .
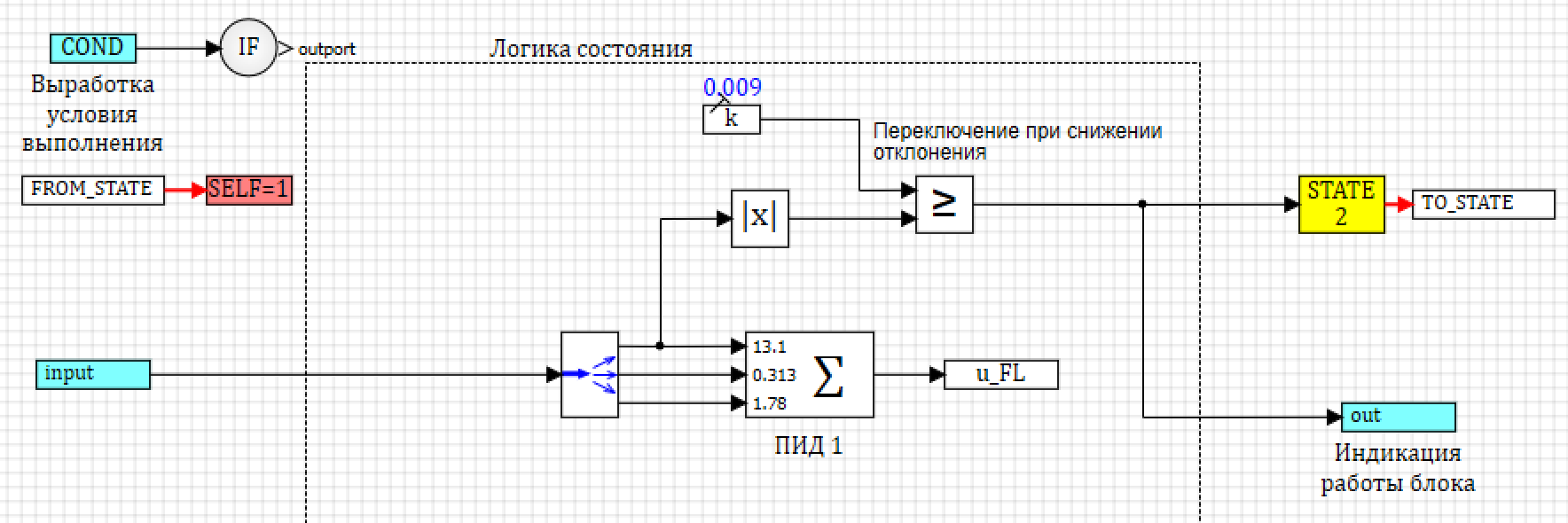
: , 0.009. , , .
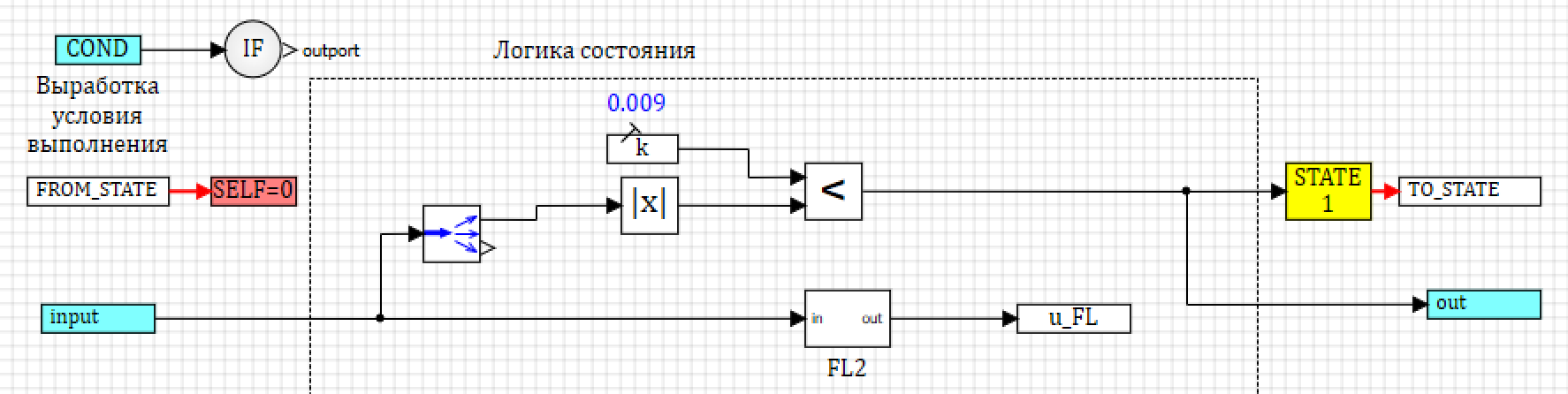
FL1, . , u_FL. , , .

25. 1.
– , 1 , 0.009.
 26. 2.
26. 2.( .. ). 24.
, , u_FL FL1, FL2 .
. , . , . , , .
– , , .
– , , .
— , , .
, :
1) إذا كان الانحراف هو أكبر و معدل التغير زيادة و تسارع التغيير يعجل ، ثم هو تأثير تخفيض .2) إذا كان الانحراف طبيعيًا وكان معدل التغيير ثابتًا ولم يتغير تسارع التغيير ، فإن التأثير لا يتغير .3) إذا كان الانحراف هو أقل و معدل التغير النقصان و تسارع التغيير يبطئ ، ثم زيادة التأثير .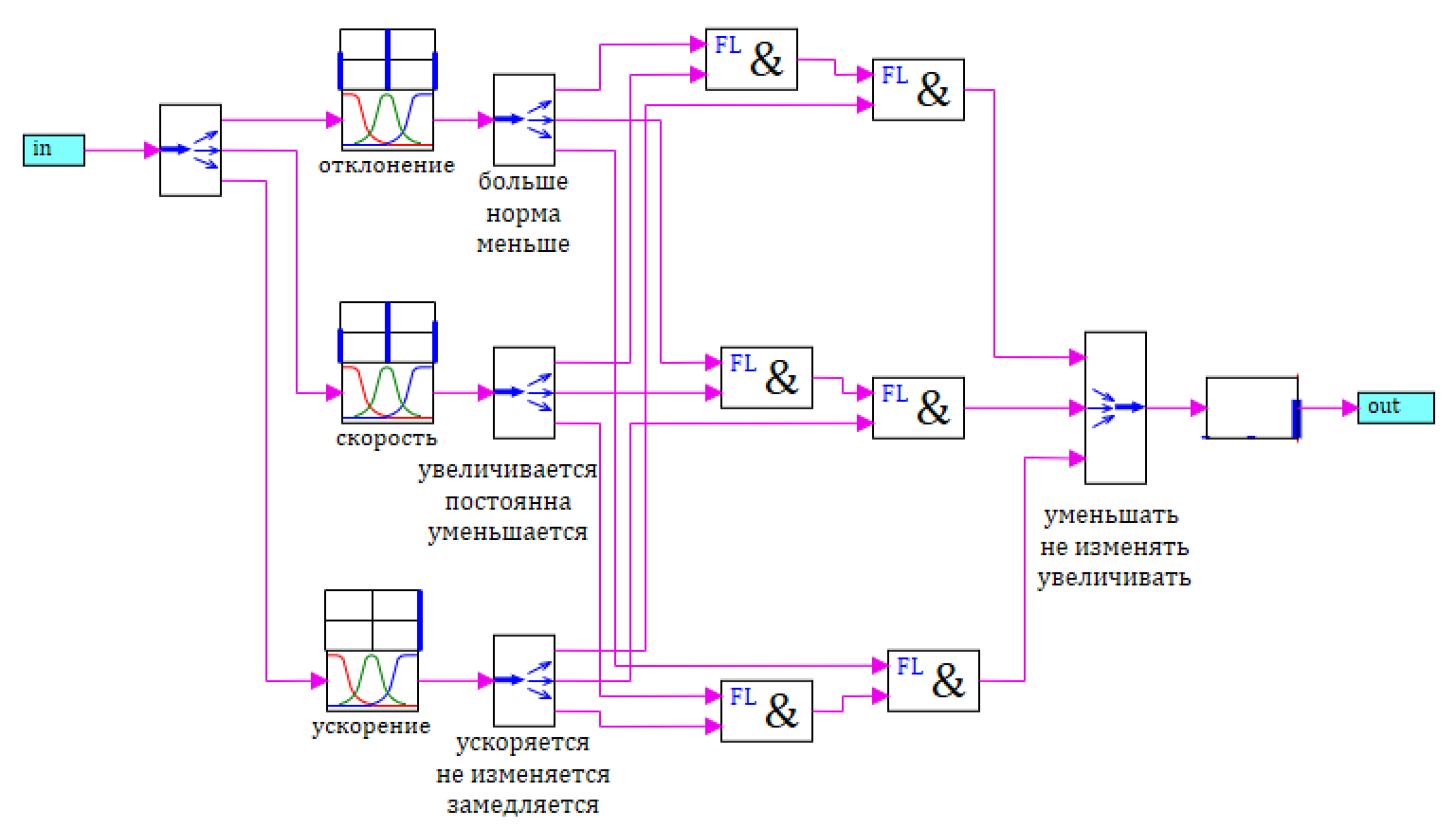
27. FL2.
N , , 0, .
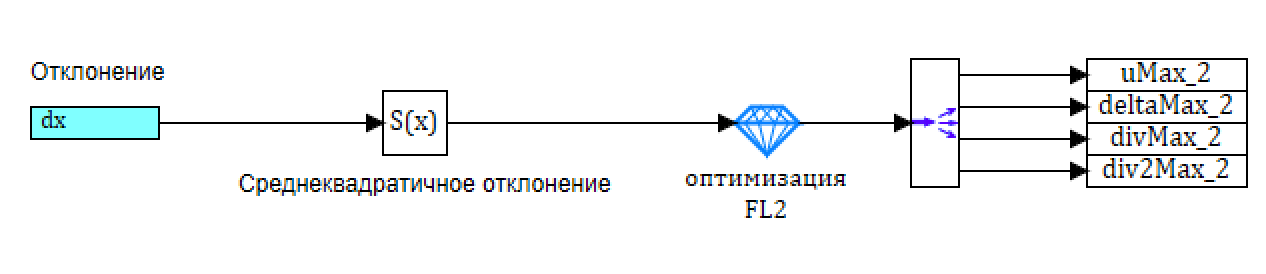
:
— uMax_2 – ;
— deltaMax_2 – ;
— divMax_2 – ;
— div2Max_2 – .
1 (. . 28)
1 , - , , 1 (. . 18 — 19) – , . . (. . 28)

28. .
: , . 29, – 30.
29. .

30. .
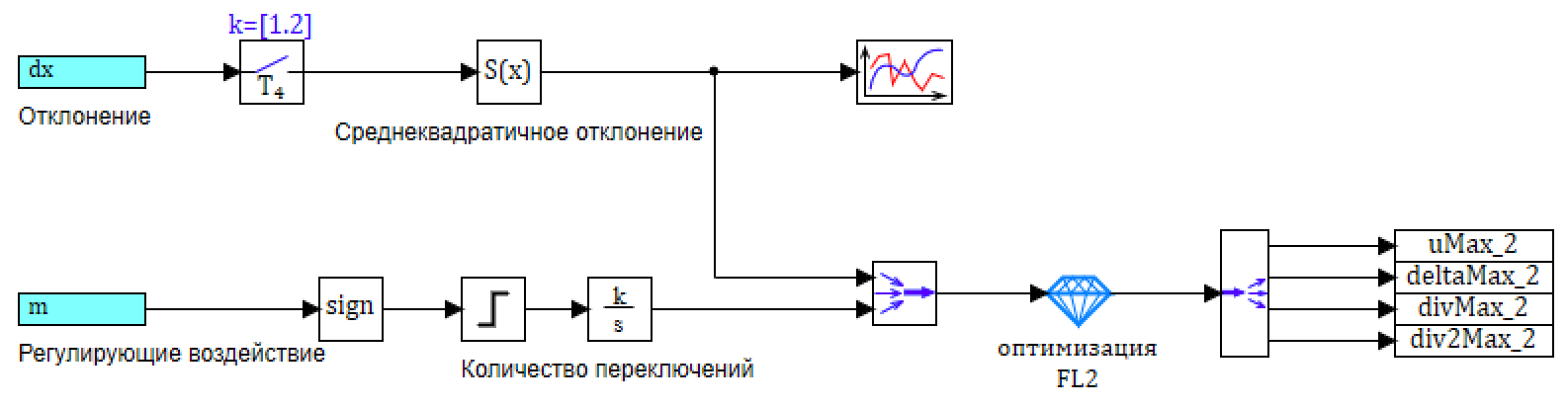
, . , . , .
, . .
:
sign, -1,0,1 , « », 1 . , , .
, .
, , 1.2 , .
31. ee.
:
[]: « = [16.564415, 0.0027674129, 0.19085771, 50], = [0.0047956855, 11]» Macro5.OptimizeBlock6
, :
— uMax_2 – = 16.564;
— deltaMax_2 – = 0.00277;
— divMax_2 – = 0.191;
— div2Max_2 – = 50.
32.
, , , . 1, 2 , .
33. , , .
 33. 1 2.
33. 1 2.
, , , . . 34.
34. -.
2, , . - :

35. -.
:
, , .
...