كيف بدأ كل شيء
أرحب بالجميع. أنا مكسيم وأريد مشاركة المعلومات حول كيفية تجميع غواصة يتم التحكم فيها عن طريق الراديو دون أي معرفة بالإلكترونيات في بداية رحلتي. أنا نفسي فنان رسوم متحركة ورسومات كمبيوتر - لم أقم أبداً بالبرمجة أو الإلكترونيات. لم يكن لدي سوى قدر ضئيل من المعرفة حول اللحام ، وهو ما أعطاني جدي عندما كنت لا أزال طالبًا في المدرسة الابتدائية.طوال حياتي كنت مهتمًا بموضوع البحث تحت الماء ، بدأ كل شيء في نفس الوقت ، في مرحلة الطفولة ، مع J.I. وانتهى كوستو بتطوير لعبة عن المحيطات الجليدية في أوروبا. ولكن ، مع ذلك ، الآن ليس حول ذلك.بعد أن قررت أن الوقت قد حان لنقل هواياتي إلى مستوى الممارسة - ذهبت إلى Youtube. لقد حصلت على عدد قليل من المعرفة الأساسية ، ثم كان طريقي موجودًا بالفعل على AliExpress ، مثل الكثير. انتهى كل شيء بشراء 27 اسمًا لوحدات مختلفة ومكونات أخرى.
أنا نفسي فنان رسوم متحركة ورسومات كمبيوتر - لم أقم أبداً بالبرمجة أو الإلكترونيات. لم يكن لدي سوى قدر ضئيل من المعرفة حول اللحام ، وهو ما أعطاني جدي عندما كنت لا أزال طالبًا في المدرسة الابتدائية.طوال حياتي كنت مهتمًا بموضوع البحث تحت الماء ، بدأ كل شيء في نفس الوقت ، في مرحلة الطفولة ، مع J.I. وانتهى كوستو بتطوير لعبة عن المحيطات الجليدية في أوروبا. ولكن ، مع ذلك ، الآن ليس حول ذلك.بعد أن قررت أن الوقت قد حان لنقل هواياتي إلى مستوى الممارسة - ذهبت إلى Youtube. لقد حصلت على عدد قليل من المعرفة الأساسية ، ثم كان طريقي موجودًا بالفعل على AliExpress ، مثل الكثير. انتهى كل شيء بشراء 27 اسمًا لوحدات مختلفة ومكونات أخرى. كان موظف مكتب البريد غير سعيد للغاية عندما كان يبحث عن 27 طردًا ...
كان موظف مكتب البريد غير سعيد للغاية عندما كان يبحث عن 27 طردًا ...بداية العمل على الغواصة والفشل الأول
في البداية ، وجدت رجلاً يعرف مباشرة الغواصات ، وقد ساعدني في النظرية والاختبارات.بعد ذلك ، بدأت على الفور في كتابة أول رمز لي لأردوينو. كان رمزًا للتحكم في محركين غواصين. اثنان من مقاييس فرق الجهد: يتحكم اليسار في الطاقة الإجمالية للمحركات ، بينما يتحكم اليمين في دوران الغواصة (يقلل من قوة أحد المحركات ، اعتمادًا على موضع مقياس الجهد). كل هذا عرضته على شاشة غير مكلفة ، حيث خططت لإنشاء لوحة تحكم منفصلة (ونتيجة لذلك ، يتم التحكم في الغواصة عبر هاتف ذكي).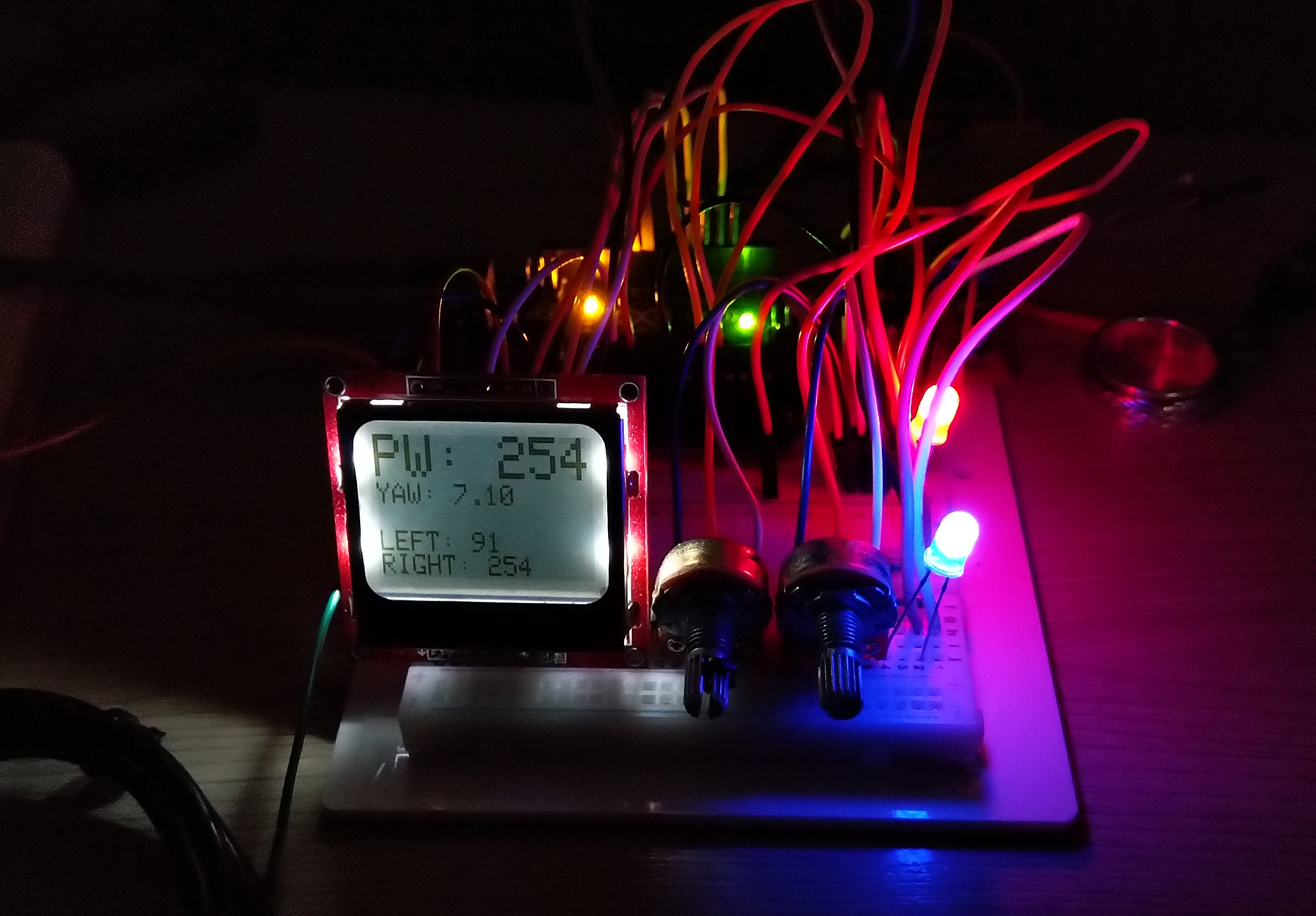 بالنظر إلى أنني لم أكن أعرف منذ أسبوع كيف تعمل مقاييس فرق الجهد ، كان حماسي لا يوصف. لم أتوقف عند هذا الحد ، ذهبت إلى متجر معدات وصيدلية. في صناعة البناء ، سجلت العديد من أنابيب البولي بروبلين والوصلات والمشابك ، وفي الصيدلية أخذت العديد من محاقن جانيت.الأنابيب ، على التوالي ، ذهبت إلى بدن الغواصة ، والحقن إلى تغيير الطفو وحدة نمطية. تبين أن الوحدة النمطية لتغيير الطفو هي الجزء الأكثر إشكالية بالنسبة لي.
بالنظر إلى أنني لم أكن أعرف منذ أسبوع كيف تعمل مقاييس فرق الجهد ، كان حماسي لا يوصف. لم أتوقف عند هذا الحد ، ذهبت إلى متجر معدات وصيدلية. في صناعة البناء ، سجلت العديد من أنابيب البولي بروبلين والوصلات والمشابك ، وفي الصيدلية أخذت العديد من محاقن جانيت.الأنابيب ، على التوالي ، ذهبت إلى بدن الغواصة ، والحقن إلى تغيير الطفو وحدة نمطية. تبين أن الوحدة النمطية لتغيير الطفو هي الجزء الأكثر إشكالية بالنسبة لي.معامل الطفو
مهام هذه الوحدة بسيطة للغاية ، تجمع المياه وتضغط عليها مرة أخرى عند الطلب. وظهر السؤال - كيفية دفع مكبس حقنة ، مع حفنة من الماكينات والمحركات ومجموعة من التروس؟ لا يستحق الدفع بهذه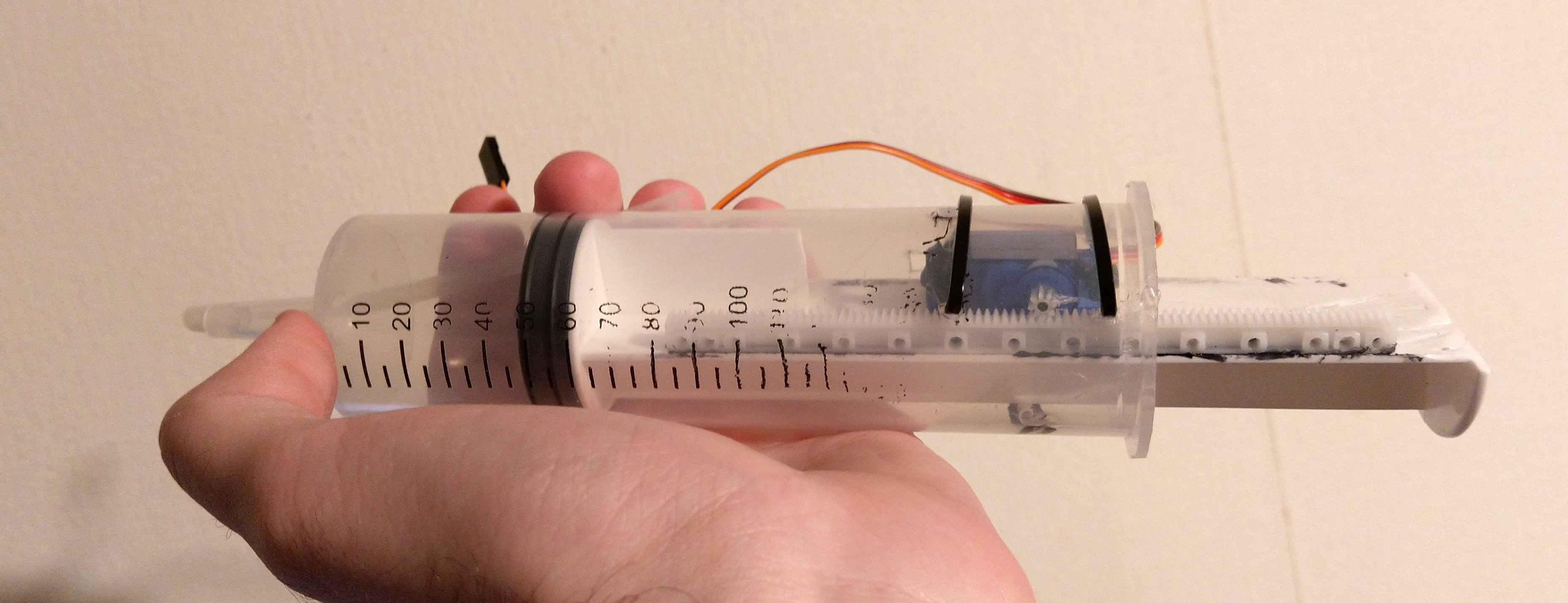 الطريقة : لقد كانت أول تجربة للتفاعل مع التروس والتفاهات الأخرى. بالمناسبة ، كنت قادرًا على إعادة صنع الماكينة sg90 لدوران 360 درجة: شحذ المزلاج على الترس الرئيسي ، الذي قلب مقياس الجهد ، ولصق عمود مقياس الجهد في الوضع الصفري حتى لا يدور عن طريق الخطأ حتى مع محدد مشذب.هذا لا يزال لا يساعد على حل المشكلة - لم أستطع إصلاح الترس المتفاعل مع رف التروس بشكل موثوق. واكتسبت الهندسة ساعدت تجربة لي في السيطرة على وحدة تغير الطفو مرة الثانية: أخذت على أجهزة أكثر قوة، قضيب الخيوط سميكة والجوز، وأنا ثابتة على المكبس. هذه المرة لم أكن منزعجًا من تعديل المؤازرة ، فقد قررت أنه من الأسهل استخدام برنامج تشغيل خارجي والاتصال مباشرة بمحرك سيرفو.
الطريقة : لقد كانت أول تجربة للتفاعل مع التروس والتفاهات الأخرى. بالمناسبة ، كنت قادرًا على إعادة صنع الماكينة sg90 لدوران 360 درجة: شحذ المزلاج على الترس الرئيسي ، الذي قلب مقياس الجهد ، ولصق عمود مقياس الجهد في الوضع الصفري حتى لا يدور عن طريق الخطأ حتى مع محدد مشذب.هذا لا يزال لا يساعد على حل المشكلة - لم أستطع إصلاح الترس المتفاعل مع رف التروس بشكل موثوق. واكتسبت الهندسة ساعدت تجربة لي في السيطرة على وحدة تغير الطفو مرة الثانية: أخذت على أجهزة أكثر قوة، قضيب الخيوط سميكة والجوز، وأنا ثابتة على المكبس. هذه المرة لم أكن منزعجًا من تعديل المؤازرة ، فقد قررت أنه من الأسهل استخدام برنامج تشغيل خارجي والاتصال مباشرة بمحرك سيرفو.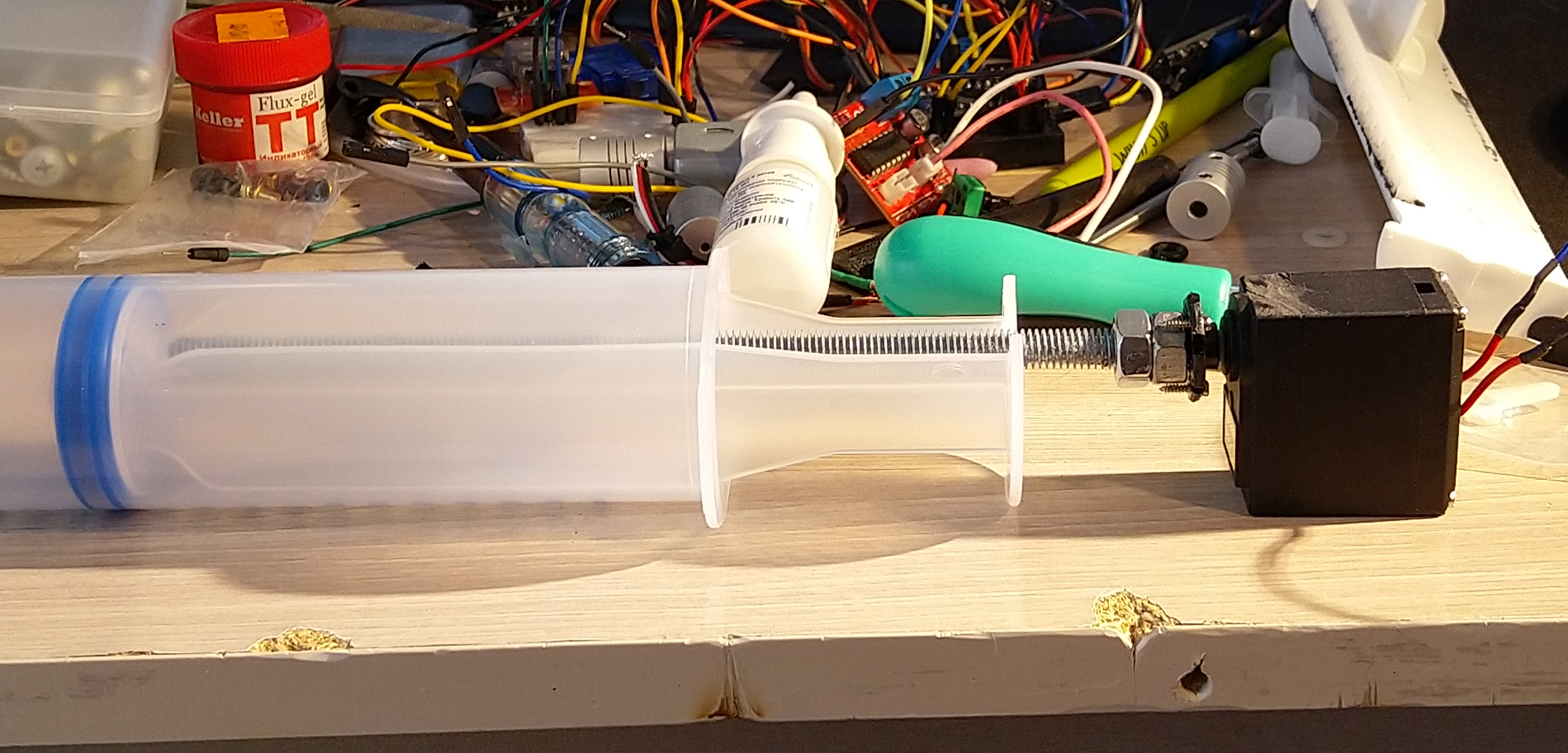
إطار من الألومنيوم للتصلب تم وضع جهاز قياس المسافات بالليزر على المكبس حتى أتمكن من التحديد في الوقت الحقيقي - في أي وضع هو الآن. حسنًا ، بناءً على بيانات المسافة هذه ، وصفت قفل المكبس عندما يكون في المواقف المتطرفة. ربما توجد طرق أبسط لتحديد موضع المكبس ، لكني وجدت عن طريق الخطأ وحدة رخيصة جدًا من الصينيين - جهاز تحديد المدى VL53L0X وقررت استخدامه. ونتيجة لذلك ، كنت سعيدًا جدًا ، المكتبة بسيطة ، وهي تعمل كما ينبغي ، كما أنصح. الدقة في المساحة المحصورة للمحقنة هي في مكان ما حوالي 5 مم ، من حيث المبدأ ، كان ذلك كافياً بالنسبة لي.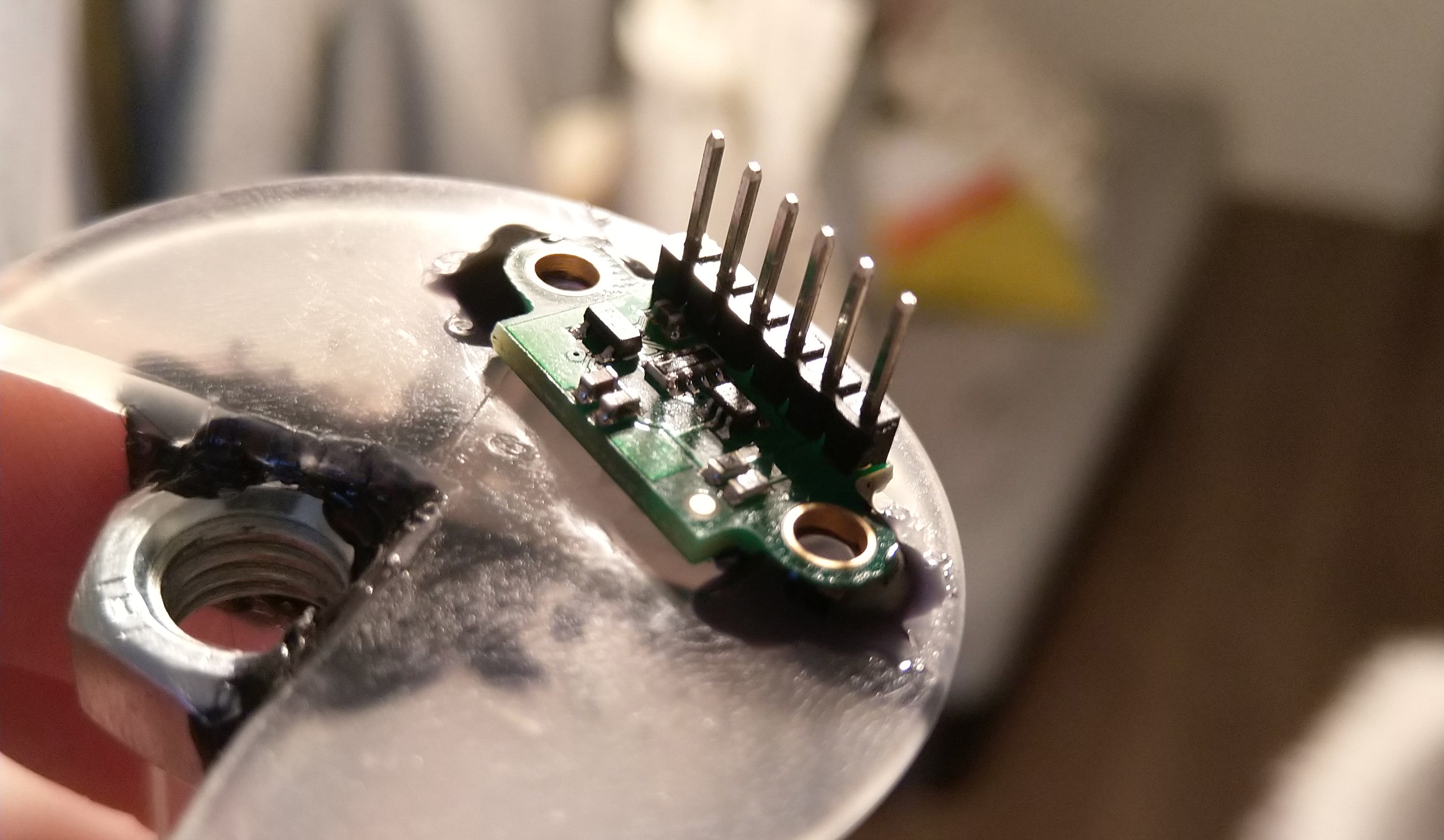 أثناء الاختبار ، نشأت مشكلة أخرى - يلتصق المكبس بقوة على جدران الحقنة. لا أعرف ما يرتبط به ، ولكن لبدء حركة المكبس ، من الضروري تطبيق قوة كبيرة ، بعد انحشاره الأولي بشكل طبيعي. لقد جربنا جميع أنواع المزلقات تقريبًا - الكثير منها جعل الأمر أسوأ. لهذا السبب ، اضطررت إلى إضافة إطار من الألومنيوم للوحدة النمطية.
أثناء الاختبار ، نشأت مشكلة أخرى - يلتصق المكبس بقوة على جدران الحقنة. لا أعرف ما يرتبط به ، ولكن لبدء حركة المكبس ، من الضروري تطبيق قوة كبيرة ، بعد انحشاره الأولي بشكل طبيعي. لقد جربنا جميع أنواع المزلقات تقريبًا - الكثير منها جعل الأمر أسوأ. لهذا السبب ، اضطررت إلى إضافة إطار من الألومنيوم للوحدة النمطية.المحركات
مع نظام الدفع ، استقرت على أبسط الحلول وأخذت محركات جاهزة تحت الماء. قبل ذلك ، اختبرت الخيار بمحرك داخل العلبة. لقد طلبت أنبوبًا صارمًا في مجموعة ذات عمود ومسامير ، ولكن عندما درست المشكلة ، اتضح أنه لأغراضي كنت بحاجة إلى نظام كامل: ختم زيت معقد ، الشفاه ، إلخ. خلاف ذلك ، فإنه سيتم المضي قدما في أي حال. لدي خطط للمستقبل لرمي الغواصة في مكان ما على Ladoga وإدارتها عبر شبكات 3G ، والجلوس في المنزل على الأريكة ، مما يعني أن أي تسرب محتمل سيؤدي إلى استقلالية صغيرة للجهاز. أخطط في المستقبل لاستخدام المحركات تحت الماء فقط ، على الأرجح بدون فرش. في هذه اللحظة ، يتم استخدام جامع:
أخطط في المستقبل لاستخدام المحركات تحت الماء فقط ، على الأرجح بدون فرش. في هذه اللحظة ، يتم استخدام جامع: أنا أتحكم بها باستخدام PWM. يقول البائع إن عمقها لا يتجاوز 8 أمتار ، وهو ما يفرض مرة أخرى بعض القيود على الفور.
أنا أتحكم بها باستخدام PWM. يقول البائع إن عمقها لا يتجاوز 8 أمتار ، وهو ما يفرض مرة أخرى بعض القيود على الفور.الإسكان
كانت القضية مهمة مثيرة للاهتمام - لإجراء اتصال مغلق ، يمكن تفكيكه بسهولة. لم أنجز المهمة ، كان علي أن ألصق كل شيء بإحكام. عندما تسحب المحقنة الماء ، يتم إنشاء الضغط داخل الجسم ويتم ضغط كل مثبتاتنا ببساطة. ونتيجة لذلك ، تم إحضار جميع الأسلاك المهمة إلى موصل مغلق ، يمكنك من خلاله شحن الجهاز ، وميض Arduino على متن الطائرة ، وتوصيل الهوائي.نعم ، تم توصيل الهوائي الخاص بنا باستخدام كبل وهو في وضع السطح ، مما يضمن اتصالًا موثوقًا به. ولكن حول الهوائي بعد ذلك بقليل. يتكون السكن من أنابيب ووصلات بولي بروبيلين 50 مم. يتم تغطية المفاصل بعجينة محكمة الغلق ، وفي الأعلى ، من أجل القوة ، مليئة بالذوبان الساخن. تم الانتهاء من فوهة حقنة ، وموصل محكم ، ومفتاح تبديل تضمين وسلكين لأضواء الكشافات. تم تثبيت الأضواء الكاشفة على قوس الجزء المغمور ، سمح هذا التصميم بتحويل مركز الجاذبية أقرب إلى مركز الغواصة.
يتكون السكن من أنابيب ووصلات بولي بروبيلين 50 مم. يتم تغطية المفاصل بعجينة محكمة الغلق ، وفي الأعلى ، من أجل القوة ، مليئة بالذوبان الساخن. تم الانتهاء من فوهة حقنة ، وموصل محكم ، ومفتاح تبديل تضمين وسلكين لأضواء الكشافات. تم تثبيت الأضواء الكاشفة على قوس الجزء المغمور ، سمح هذا التصميم بتحويل مركز الجاذبية أقرب إلى مركز الغواصة.أدمغة الغواصات
هذا هو الجزء الأكثر إثارة للاهتمام بالنسبة لي. عندما بدأت في العمل على الدائرة ، ما زلت لا أعرف كيف ، على سبيل المثال ، تعمل المكثفات ولماذا هناك حاجة إليها. كنت سعيدًا جدًا ، عندما توقفت الطاقة ، تلاشى مؤشر LED على Arduino ببطء بسبب مكثف سعوي.في الواقع ، كانت مفيدة في الدائرة لتنعيم القمم الناشئة في الدائرة بسبب تشغيل محركات التجميع. كما أنها ضرورية لتوصيل منظم الجهد.لدينا بطارية من خليتين ، 8.4 فولت على التوالي ، يذهب الجهد إلى المحركات ، و 5 فولت بعد المثبت - إلى Arduino وأجهزة استشعار أخرى. مخطط كامل الحجم (قابل للنقر):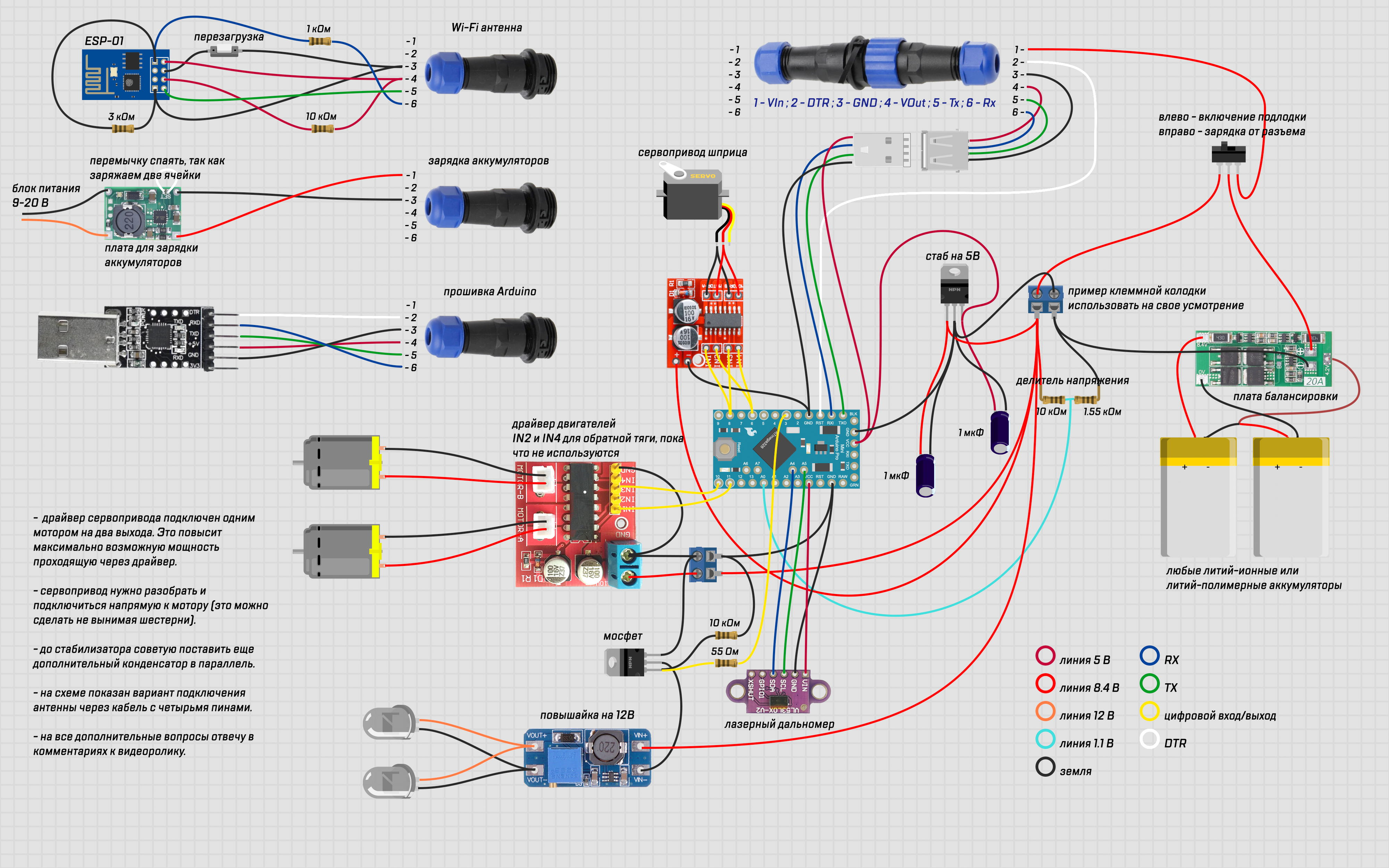 في البداية ، لم ينجح الكثير لمجرد أنني جمعت كل شيء على لوحة توصيل. لم أستطع أن أفهم لماذا لا يعمل هذا الجزء أو ذاك من الدائرة. ونتيجة لذلك ، بدأ كل شيء في اللحام ولم تكن نتائج الاختبار الإيجابية طويلة.
في البداية ، لم ينجح الكثير لمجرد أنني جمعت كل شيء على لوحة توصيل. لم أستطع أن أفهم لماذا لا يعمل هذا الجزء أو ذاك من الدائرة. ونتيجة لذلك ، بدأ كل شيء في اللحام ولم تكن نتائج الاختبار الإيجابية طويلة.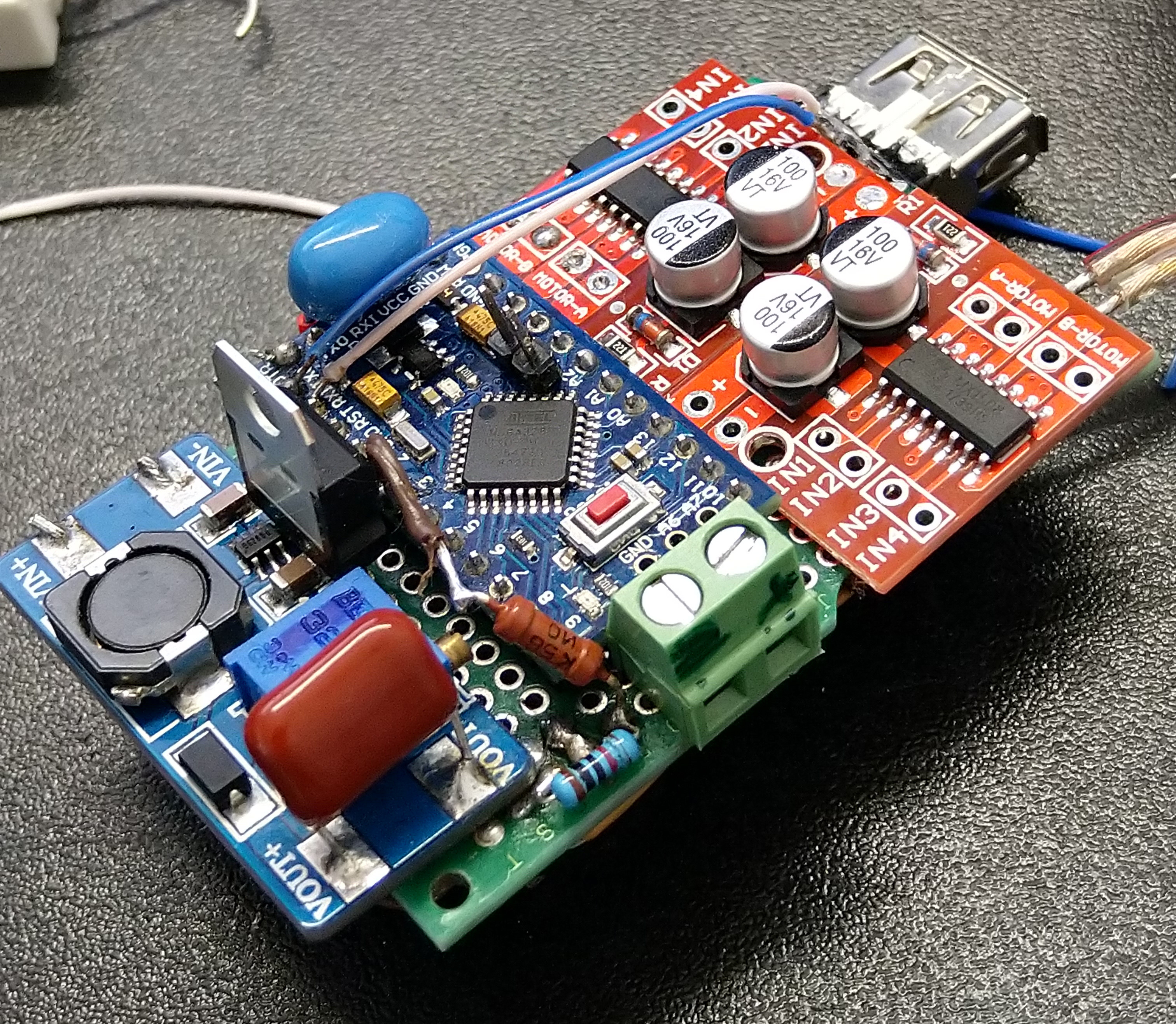 نشأت واحدة من المشاكل المثيرة للاهتمام مع محدد المدى. لديه مكتبة جيدة ، ولكن إذا قمت بتعيين وضع الدقة إلى متوسط أو مرتفع ، فسيتباطأ الرسم بالكامل وسيخرج عنصر التحكم مع ping من 2000 مللي ثانية كحد أدنى. وبسبب هذا ، فإن مكتشف النطاق في وضع FAST ، لكن دقته لا تزال كافية لمهامنا.الشيء التالي الذي صادفته هو إدارة الكابلات. قطر العلبة 50 مم. يبدو أن هذا كثير ، حتى تبدأ في محاولة وضع كل شيء في الداخل. لقد استخدمت كبلات جريئة بشكل مفرط ومصممة للصوت ، والتي خذلتني كثيرًا. أردت فقط النحاس ، لأنه مناسب لحامها ، بحيث لا تنكسر ، مثل الألومنيوم. في المرة القادمة سأقضي المزيد من الوقت في البحث عن أسلاك جيدة.
نشأت واحدة من المشاكل المثيرة للاهتمام مع محدد المدى. لديه مكتبة جيدة ، ولكن إذا قمت بتعيين وضع الدقة إلى متوسط أو مرتفع ، فسيتباطأ الرسم بالكامل وسيخرج عنصر التحكم مع ping من 2000 مللي ثانية كحد أدنى. وبسبب هذا ، فإن مكتشف النطاق في وضع FAST ، لكن دقته لا تزال كافية لمهامنا.الشيء التالي الذي صادفته هو إدارة الكابلات. قطر العلبة 50 مم. يبدو أن هذا كثير ، حتى تبدأ في محاولة وضع كل شيء في الداخل. لقد استخدمت كبلات جريئة بشكل مفرط ومصممة للصوت ، والتي خذلتني كثيرًا. أردت فقط النحاس ، لأنه مناسب لحامها ، بحيث لا تنكسر ، مثل الألومنيوم. في المرة القادمة سأقضي المزيد من الوقت في البحث عن أسلاك جيدة.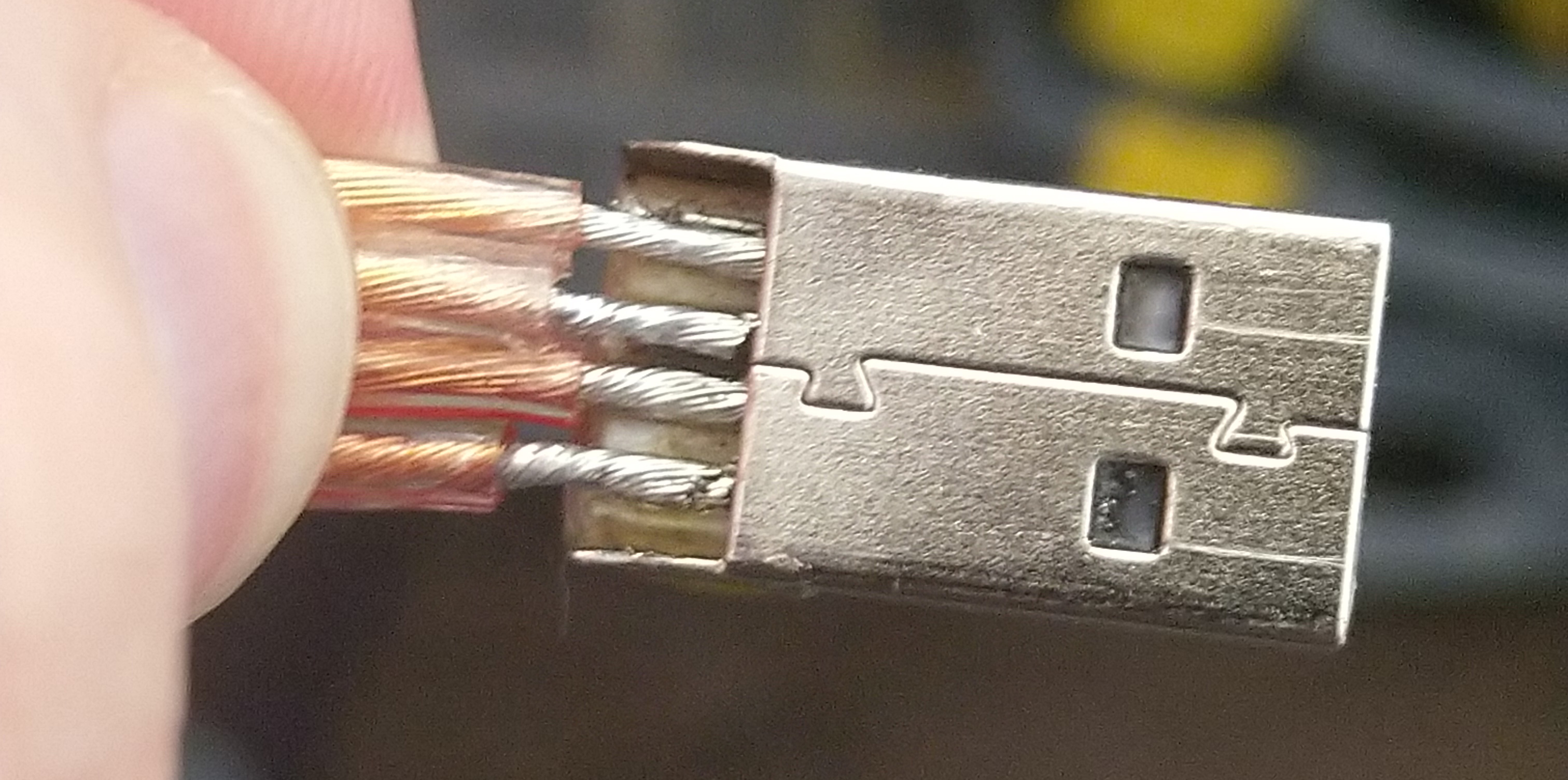
 نشأت صعوبات أخرى فقط مع الهوائي.
نشأت صعوبات أخرى فقط مع الهوائي.هوائي
كهوائي ، قررت استخدام esp8266 والتحكم في الغواصة عبر هاتف ذكي عبر Wi-Fi. فقط الصينيون لديهم مجموعة متنوعة من الوحدات استنادًا إلى ESP8266 ، اشتريت ثلاث وحدات مختلفة ، لكنني تمكنت من الاتصال وفلاش واحد فقط منهم - ESP-01 .من الناحية النظرية ، إذا طلبت الآن ، فستكون بالفعل مع البرامج الثابتة اللازمة. الإدارة عن طريق RemoteXY ، وهو يحتاج إلى إصدار برنامج ثابت محدد لأوامر AT. تم حل مشكلة العثور على البرنامج الثابت المناسب للتحكم عبر أوامر AT فقط بمساعدة دليل RemoteXY. بالمناسبة ، وليس الإعلان ، أنا فقط أحببت الواجهة ، وعندها فقط وجدت مصممي واجهة أكثر ملاءمة ومتطورة لجميع أنواع إنترنت الأشياء.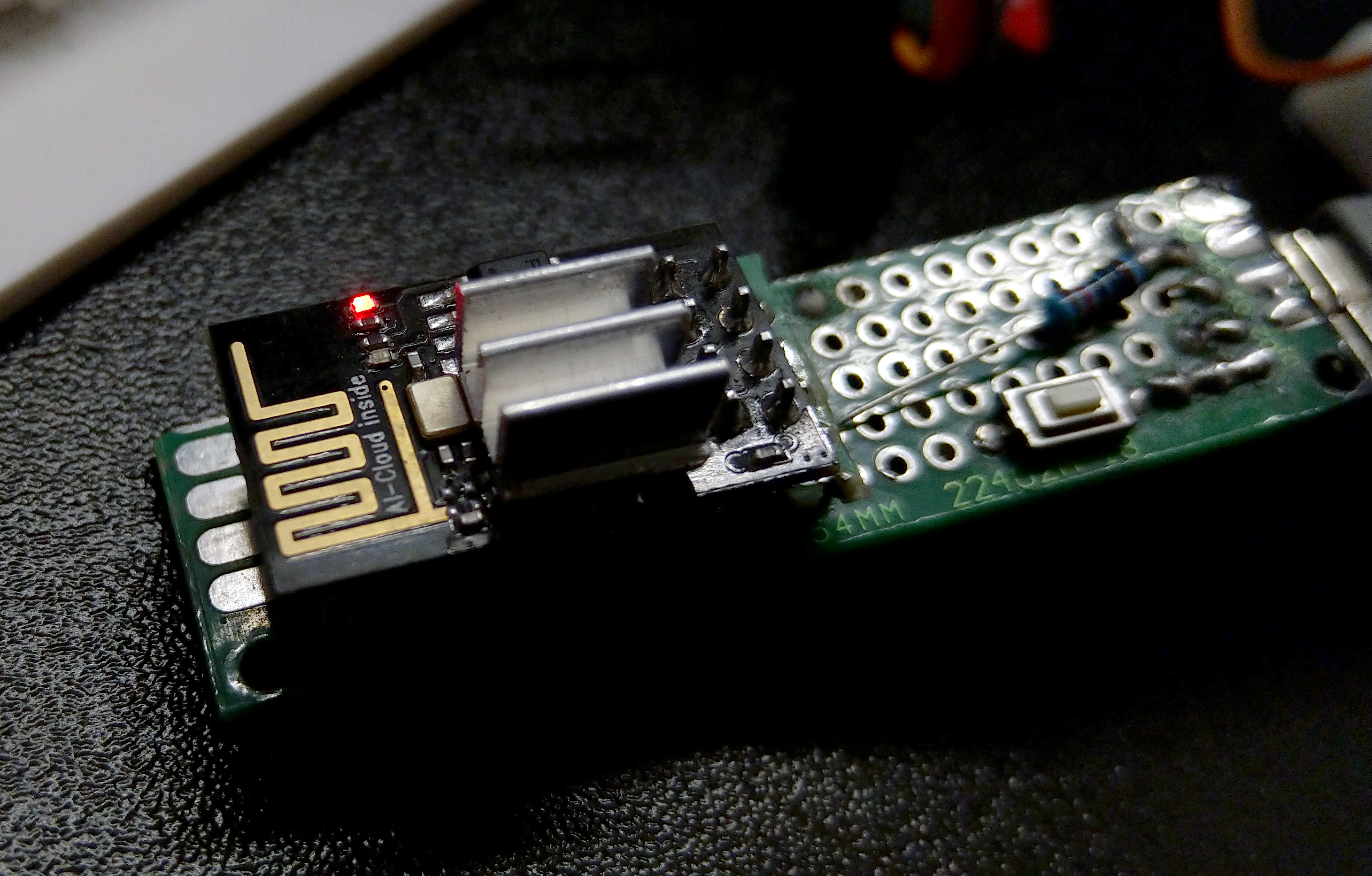 بعد نجاح البرامج الثابتة ، قمت بتعليق الوحدة مع المكونات الضرورية للعمل وقمت بلحام موصل USB للاتصال المريح. دمج ماتي USB في الفلين من تحت زجاجة عادية وحصلنا على هوائي سلكي بسيط مع القدرة على تغيير الحالة (استبدال الزجاجة).
بعد نجاح البرامج الثابتة ، قمت بتعليق الوحدة مع المكونات الضرورية للعمل وقمت بلحام موصل USB للاتصال المريح. دمج ماتي USB في الفلين من تحت زجاجة عادية وحصلنا على هوائي سلكي بسيط مع القدرة على تغيير الحالة (استبدال الزجاجة). كان هناك المزيد من المشاكل إلى جانب البرامج الثابتة.يجب أن تعمل لوحة ESP-01 من 3.3 فولت ، وليس من 5 فولت. علاوة على ذلك ، كل من المنطق ومصدر الطاقة. إذا قمت بتكوين المنطق من خلال محول المستوى ، فعندئذ كنت كسولًا جدًا لدرجة عدم العبث بالقوة وأنا فقط عالقت طفلًا صغيرًا في المبرد على الشريحة. من خمسة فولت يعمل بشكل جيد ، لكنه يصبح ساخنًا جدًا. يساعد المبرد في النهاية على عدم حرق الشريحة.
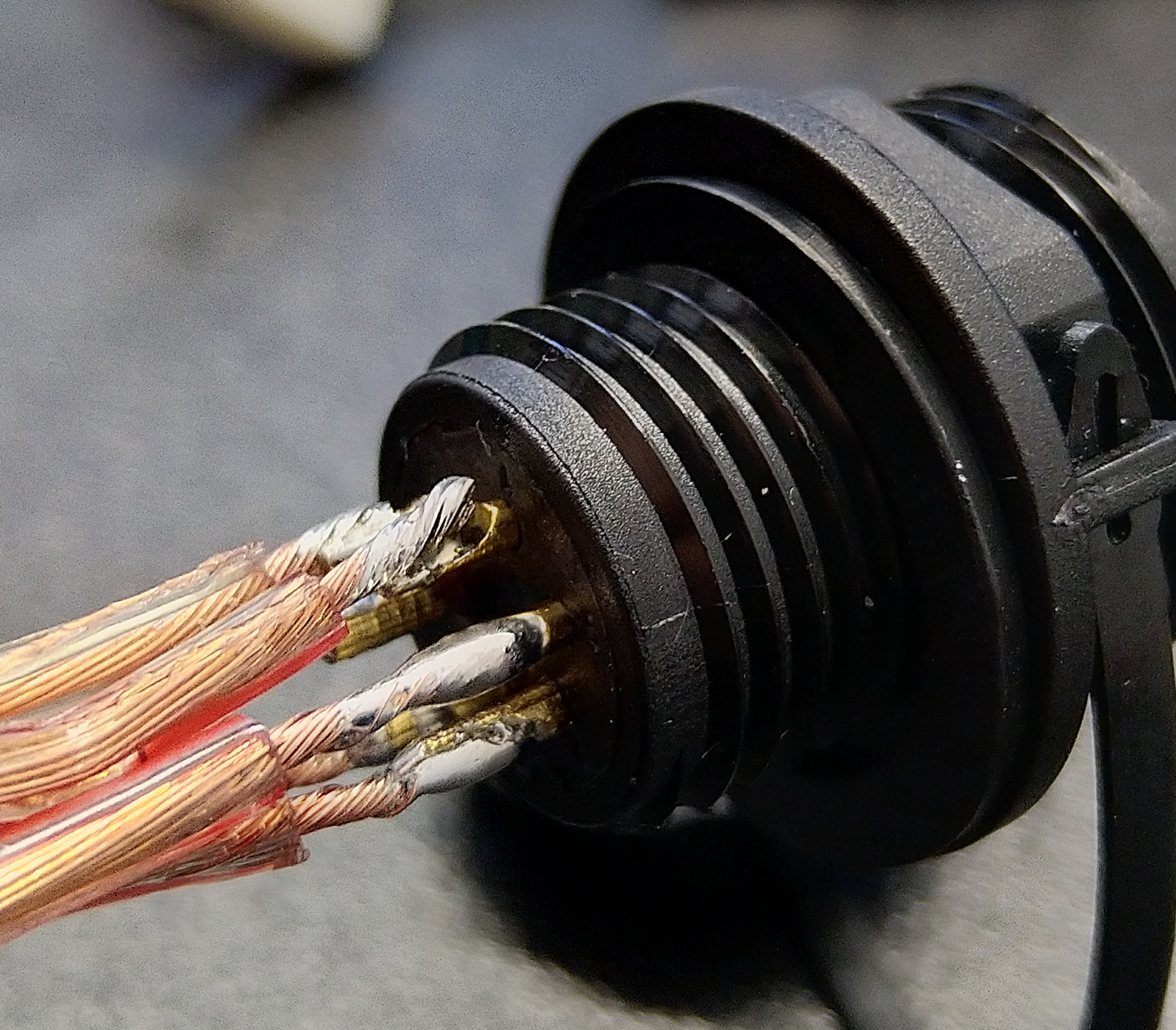
كان هناك المزيد من المشاكل إلى جانب البرامج الثابتة.يجب أن تعمل لوحة ESP-01 من 3.3 فولت ، وليس من 5 فولت. علاوة على ذلك ، كل من المنطق ومصدر الطاقة. إذا قمت بتكوين المنطق من خلال محول المستوى ، فعندئذ كنت كسولًا جدًا لدرجة عدم العبث بالقوة وأنا فقط عالقت طفلًا صغيرًا في المبرد على الشريحة. من خمسة فولت يعمل بشكل جيد ، لكنه يصبح ساخنًا جدًا. يساعد المبرد في النهاية على عدم حرق الشريحة.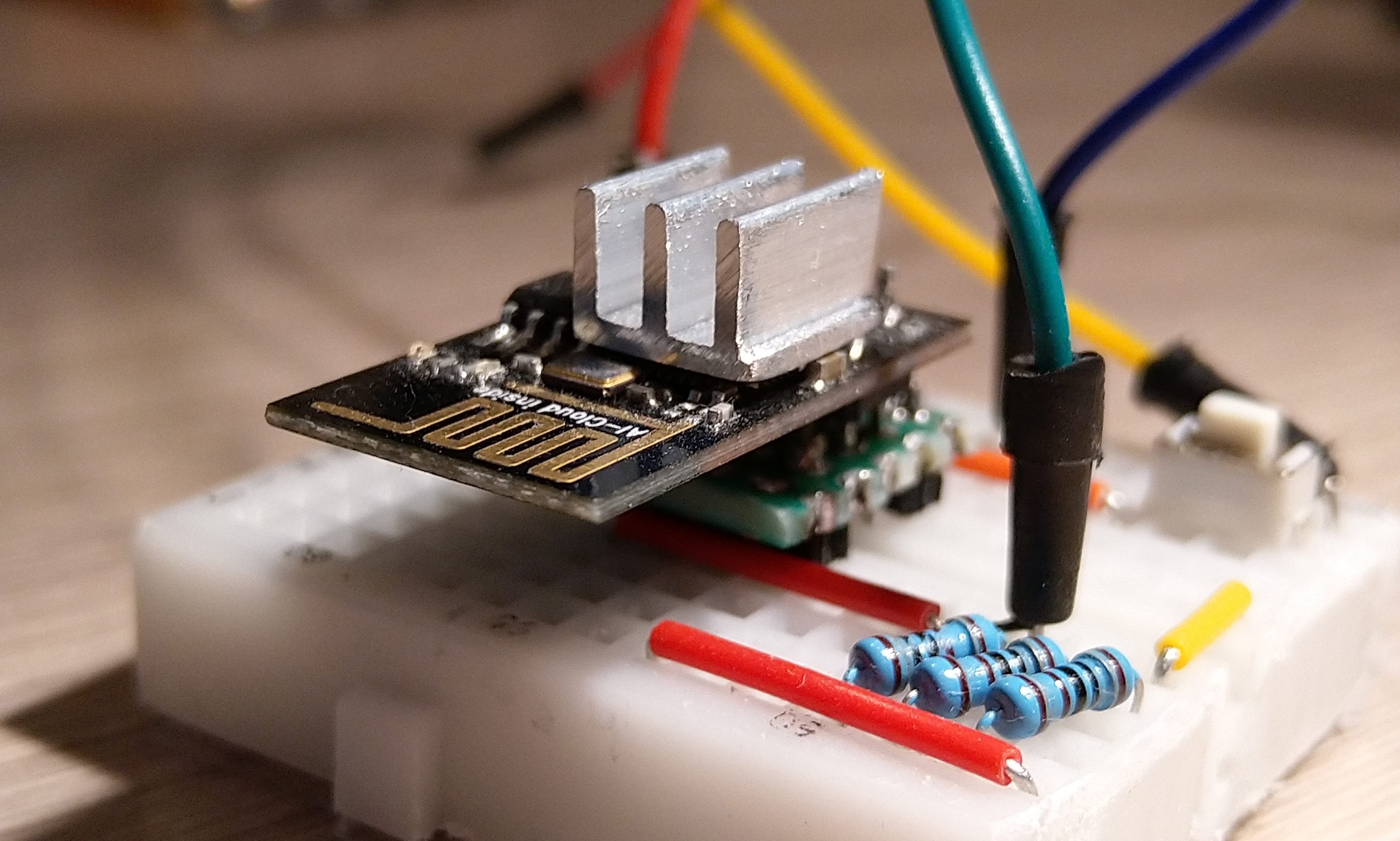 مشكلة أخرى - لقد التقطت الكبل المثالي للموصل المختوم ، ولكنه ليس سوى دبابيس مع تدريع ، بينما يحتاج الهوائي إلى 4 (الطاقة و RX و TX للاتصال بين الهوائي و Arduino على متن الطائرة).اتضح أنه لن يكون من الممكن ببساطة تشغيل هوائينا بشكل منفصل ، لأنه من أجل عمل ESP + Arduino ، كان من الضروري أن يكون هناك أرضية مشتركة. اضطررت إلى استخدام التدريع كأرض بالقرب من الكابل ، وإضافة بطارية منفصلة إلى الهوائي نفسه. غير مريح ، لكنه يعمل. بالطبع ، من الأسهل العثور على كبل لـ 4 نوى وتغذية الهوائي ببطاريات من الغواصة.
مشكلة أخرى - لقد التقطت الكبل المثالي للموصل المختوم ، ولكنه ليس سوى دبابيس مع تدريع ، بينما يحتاج الهوائي إلى 4 (الطاقة و RX و TX للاتصال بين الهوائي و Arduino على متن الطائرة).اتضح أنه لن يكون من الممكن ببساطة تشغيل هوائينا بشكل منفصل ، لأنه من أجل عمل ESP + Arduino ، كان من الضروري أن يكون هناك أرضية مشتركة. اضطررت إلى استخدام التدريع كأرض بالقرب من الكابل ، وإضافة بطارية منفصلة إلى الهوائي نفسه. غير مريح ، لكنه يعمل. بالطبع ، من الأسهل العثور على كبل لـ 4 نوى وتغذية الهوائي ببطاريات من الغواصة. في الصورة ، هناك مصادفة جيدة لأقطار الكبل وأنبوب السيليكون وثقب التجعيد في الموصل المختوم.
في الصورة ، هناك مصادفة جيدة لأقطار الكبل وأنبوب السيليكون وثقب التجعيد في الموصل المختوم.الإدارة والبرامج الثابتة
تتم الإدارة من خلال الواجهة من الهاتف الذكي. تتكون الواجهة من وحدات جاهزة مباشرة على الموقع ، واستلمت شفرة المصدر للواجهة ، ثم بقيت فقط لربط عناصر الواجهة المختلفة بالإجراءات داخل البرنامج الثابت.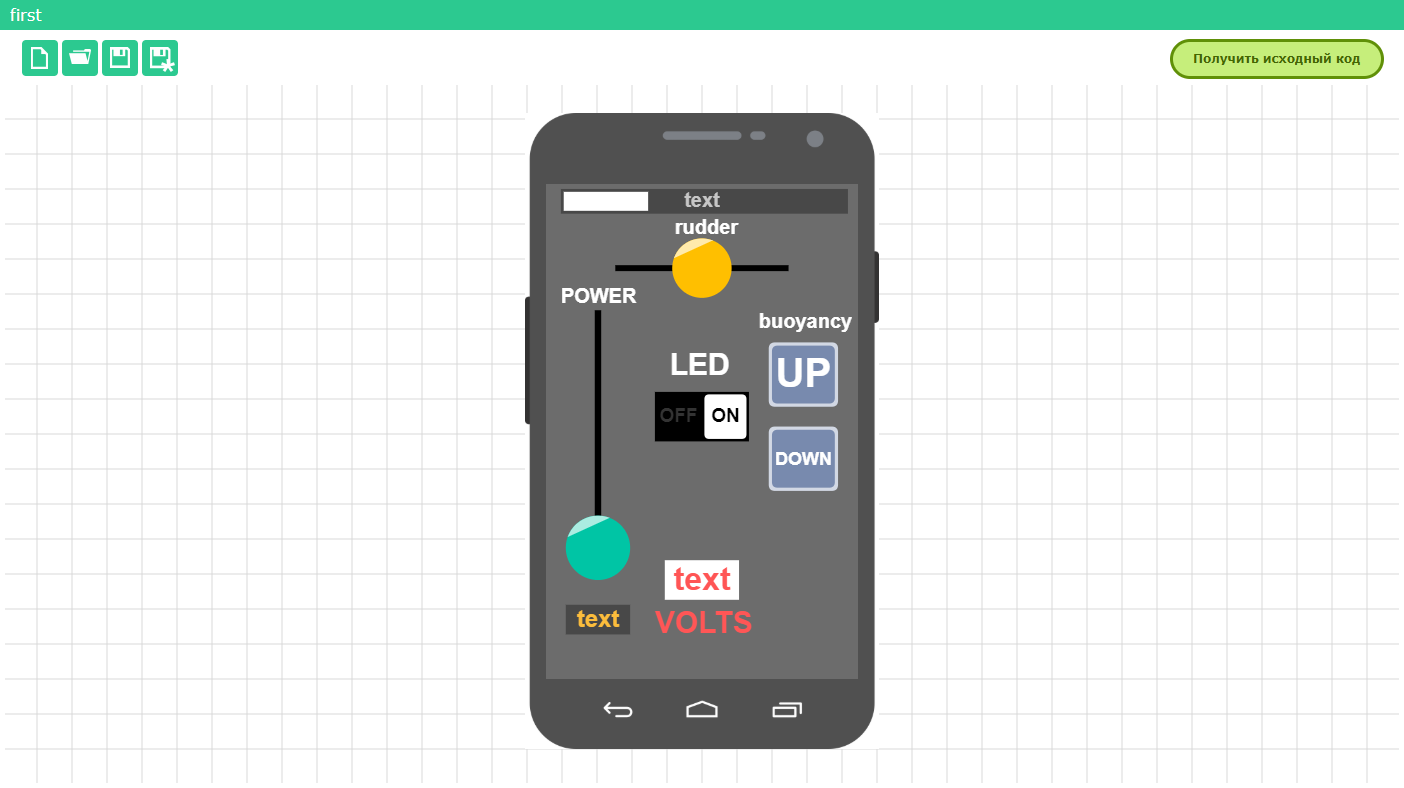 قبل استلام شفرة المصدر للواجهة ، تحتاج إلى تحديد نوع الوحدة اللاسلكية التي سيتفاعل معها Arduino في الإعدادات. نقوم فقط بوميض Arduino نفسه - مع وحدة Wi-Fi ، يستمر الاتصال تلقائيًا من خلال أوامر AT. يتم إنشاء نقطة وصول والاتصال بها من هاتف ذكي والتحكم فيها من خلال تطبيق مثبت مسبقًا. تأتي الواجهة من Arduino ، وهي موصولة في البرامج الثابتة ومعترف بها من قبل التطبيق نفسه في الهاتف الذكي.كان هذا أول رمز لي ، ولن أتركه هنا ، لأنه يستخدم مهارات البرمجة الأساسية والرياضيات الأساسية فقط. كانت هناك بعض اللحظات الصعبة بالنسبة لي - لم أستطع القيام بالعملية المنطقية المعتادة في المرة الأولى - لذلك في بعض القيم سيتم حظر محرك سيرفو للحقنة للحركة ذات الاتجاه الواحد.على سبيل المثال ، عندما يتعلق الأمر بالحد الأقصى من استهلاك الماء ، يجب أن يتوقف المكبس إلى الوراء ، ولكن لا يجب أن يسد إلى الأمام. والعكس بالعكس ، عندما يتم ضغط كل الماء ، يجب ألا يستمر المكبس للأمام ، ولكن دون أي مشاكل في تنفيذ أمر الإرجاع.
قبل استلام شفرة المصدر للواجهة ، تحتاج إلى تحديد نوع الوحدة اللاسلكية التي سيتفاعل معها Arduino في الإعدادات. نقوم فقط بوميض Arduino نفسه - مع وحدة Wi-Fi ، يستمر الاتصال تلقائيًا من خلال أوامر AT. يتم إنشاء نقطة وصول والاتصال بها من هاتف ذكي والتحكم فيها من خلال تطبيق مثبت مسبقًا. تأتي الواجهة من Arduino ، وهي موصولة في البرامج الثابتة ومعترف بها من قبل التطبيق نفسه في الهاتف الذكي.كان هذا أول رمز لي ، ولن أتركه هنا ، لأنه يستخدم مهارات البرمجة الأساسية والرياضيات الأساسية فقط. كانت هناك بعض اللحظات الصعبة بالنسبة لي - لم أستطع القيام بالعملية المنطقية المعتادة في المرة الأولى - لذلك في بعض القيم سيتم حظر محرك سيرفو للحقنة للحركة ذات الاتجاه الواحد.على سبيل المثال ، عندما يتعلق الأمر بالحد الأقصى من استهلاك الماء ، يجب أن يتوقف المكبس إلى الوراء ، ولكن لا يجب أن يسد إلى الأمام. والعكس بالعكس ، عندما يتم ضغط كل الماء ، يجب ألا يستمر المكبس للأمام ، ولكن دون أي مشاكل في تنفيذ أمر الإرجاع. if ((RemoteXY.button_1 == 1) && (RemoteXY.button_2 == 0) && (val_f < 100)) {
pwm_UP = 1;
pwm_DOWN = 0;
}
else if ((RemoteXY.button_1 == 0) && (RemoteXY.button_2 == 1) && (val_f > 25)) {
pwm_UP = 0;
pwm_DOWN = 1;
}
else {
pwm_UP = 0;
pwm_DOWN = 0;
}
هذا هو البناء المنطقي في النهاية ، حيث RemoteXY.button_ # هي أزرار في الواجهة للغوص أو التسطيح.أيضًا ، من الجزء الصعب بالنسبة لي في الكود ، هذا هو مرشح مكتشف النطاق (أخذت واحدة من أبسطها في الشبكة) ، حسنًا ، تحديد القيم لمقياس الفولتميتر. كان المرشح مطلوبًا بسبب وضع FAST المذكور أعلاه على معين المدى ، حيث قفزت قيم الإدخال كثيرًا وساعد المرشح على التعامل معه. لكن الفولتميتر كان مفيدًا للإشارة إلى تفريغ البطاريات. يحتوي Arduino على دبوس مرجعي ، وإذا لم يتم تطبيق أكثر من 1.1 فولت عليه ، فسيكون Arduino قادرًا على تحديد الجهد الموفر لهذا الدبوس بدقة. نقوم بتحويل 8.4 فولت بعد مقسم الجهد إلى 1.1 فولت ، وتبين أن هذا التحويل غير دقيق ، كان علي تصحيح قيمة الجهد تجريبيًا بإضافة متغير إلى البرامج الثابتة.اختبارات
تم إجراء الاختبار على محجر مهجور بمياه نظيفة نسبياً. بالنسبة للاختبارات ، كان من الضروري إصلاح الكاميرا وضبط القطع الغواصة (إلى جانب الطفو المحايد الأساسي).تم حل المهمة الأولى ببساطة عن طريق تثبيت المسمار المناسب لتركيب الكاميرا. لتجنب دوران الكاميرا ، تمت إضافة القليل من الصلصال. تم التحكم في أداة التشذيب بواسطة حقيبة ، والتي تبين أنها مناسبة للتعليق على المشبك ، ويمكن بالفعل تحريك المشبك بسهولة على طول الغواصة. من خلال عدد المكسرات في الحقيبة ، قمنا بإعداد طفو محايد ، ثم التقطنا بسرعة موضع المشبك حتى لا تلدغ الغواصة أنفها. تم اتخاذ القرار بشأن هذا الخيار قبل الرحلة إلى المحجر ، ببساطة لم يكن هناك وقت متبقٍ لإنشاء نظام تقليم تلقائي. من الناحية النظرية ، من السهل جدًا تحريك الحمل على طول القضيب الملولب. في الغواصة التالية سأحاول هذا الخيار بالضبط. هنا ، ربما ، هي الغواصة بأكملها.لقد سجلت مقطعي فيديو حيث أتحدث بمزيد من التفصيل عن التجميع وأظهر اللقطات التي تمكنت من تصويرها تحت الماء. نتمنى لك طيبالمشاهدة:آمل أن تكون المادة مثيرة للاهتمام. بعد ذلك ستكون التجارب على غرفة الضغط (للتحقق من ضيق الجهاز) واختبارات المجاديف تحت الماء. عليها سأقوم أيضًا بإعداد مادة في شكل مقال ، ولكن بالفعل مع الرسوم البيانية ومقارنات القرارات المختلفة.
تم التحكم في أداة التشذيب بواسطة حقيبة ، والتي تبين أنها مناسبة للتعليق على المشبك ، ويمكن بالفعل تحريك المشبك بسهولة على طول الغواصة. من خلال عدد المكسرات في الحقيبة ، قمنا بإعداد طفو محايد ، ثم التقطنا بسرعة موضع المشبك حتى لا تلدغ الغواصة أنفها. تم اتخاذ القرار بشأن هذا الخيار قبل الرحلة إلى المحجر ، ببساطة لم يكن هناك وقت متبقٍ لإنشاء نظام تقليم تلقائي. من الناحية النظرية ، من السهل جدًا تحريك الحمل على طول القضيب الملولب. في الغواصة التالية سأحاول هذا الخيار بالضبط. هنا ، ربما ، هي الغواصة بأكملها.لقد سجلت مقطعي فيديو حيث أتحدث بمزيد من التفصيل عن التجميع وأظهر اللقطات التي تمكنت من تصويرها تحت الماء. نتمنى لك طيبالمشاهدة:آمل أن تكون المادة مثيرة للاهتمام. بعد ذلك ستكون التجارب على غرفة الضغط (للتحقق من ضيق الجهاز) واختبارات المجاديف تحت الماء. عليها سأقوم أيضًا بإعداد مادة في شكل مقال ، ولكن بالفعل مع الرسوم البيانية ومقارنات القرارات المختلفة.