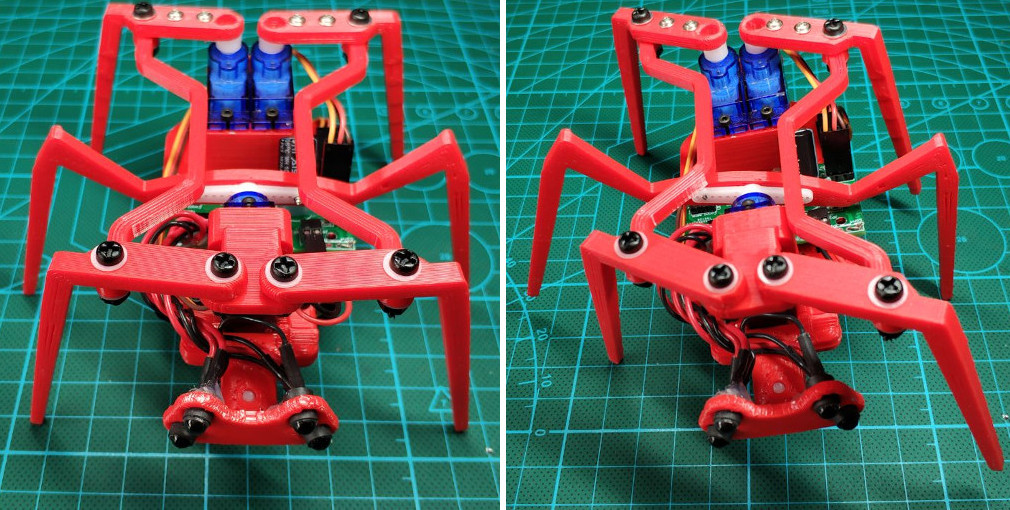
تعرف على بيتيا ، الماكينة الثلاثة ذات الأرجل الستة
أستمر في نشر مقالات من سلسلة Arduino Brain. بيتيا هي سداسي الأرجل رخيصة جدا (حوالي عشرة دولارات). يمكن أن يكون مشروعًا رائعًا لقضاء يوم ممطر واحد ، والذي سيستمتع به كل من البالغين والأطفال. نظرًا لأننا نتحدث عن الترفيه ، إليك مقطع فيديو يرقص فيه بيتيا على موسيقى الفانك:
بالطبع ، لم أقم بأي تحليل صوتي ، لقد قمت ببساطة ببرمجة بيتيا للرقص بإيقاع معين. إليكم مقطع فيديو آخر أظهر فيه بيتيا احتقاره للتلاعب بالكرات:
في شكله الحالي ، يمكن لبيتيا المشي فقط ، ولكن في نفس الوقت يمكنه رؤية (قياس المسافة إلى) العوائق القريبة. ومع ذلك ، فإن أدمغته منتجة بما يكفي لتكون قادرة على استيعاب البيانات من العديد من أجهزة الاستشعار الأخرى ، وإرسال اقتراحاتك!
كيفية استنساخ بيتيا
قائمة التسوق
3 , / . , :
- . , . - 10€ / 10 ( ), 2€ / 10 . , , . — , cheapduino - , .
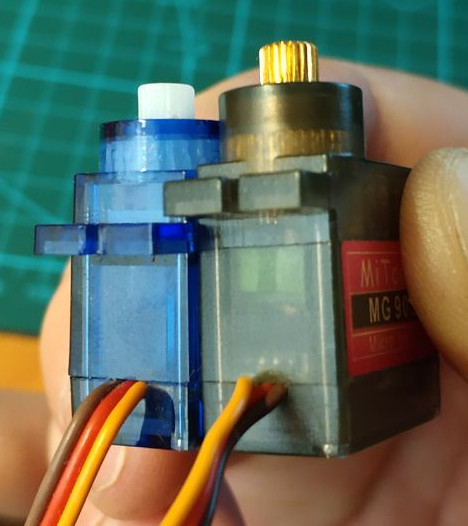
- SG90 9G , 3 * 1.47€ /
- 4x AAA , 1.34€ /
- ATMega8A-AU (QFP-32), 1€ /
- IR LED + IR , 0.20€ /
- 1000uF 16V, 0.17€ /
- 2n3904 , 3 * 0.01€ /
- , , , 0805 . : hardware/motherboard/BOM.html.
, , . (, ), . . — . , ;)
NB: 9g , . . , , , SketchUp . , , , .
, 3 , hardware/body/. - ::
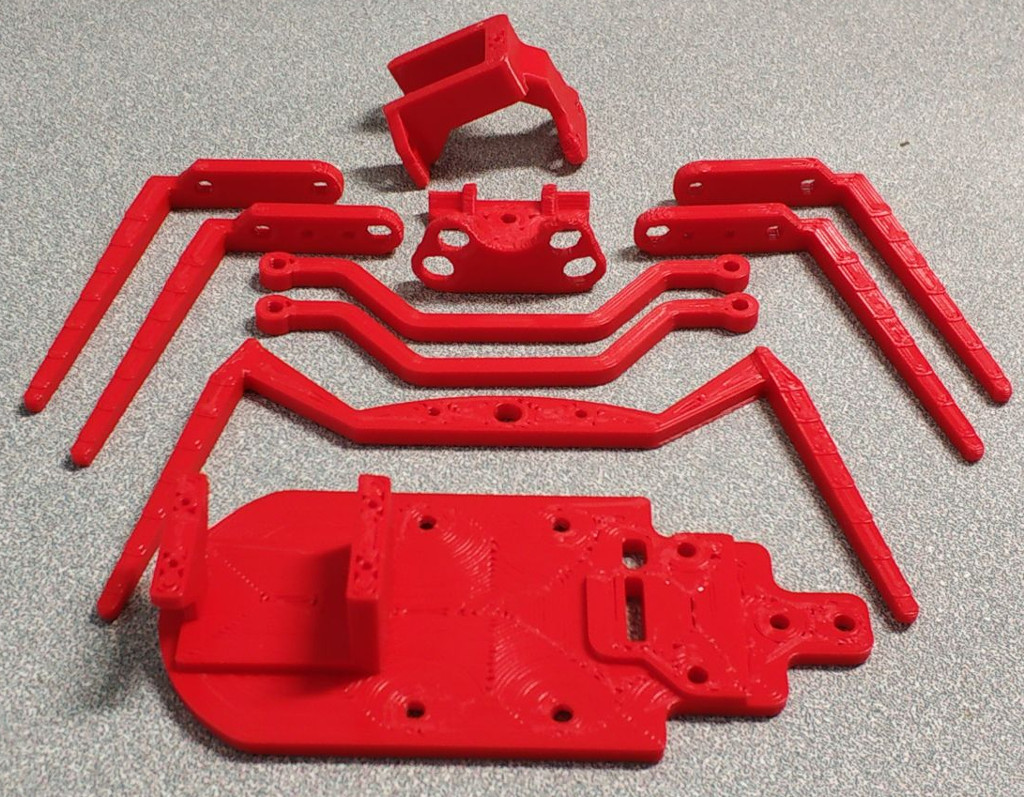
1, . - :

3 . , . :
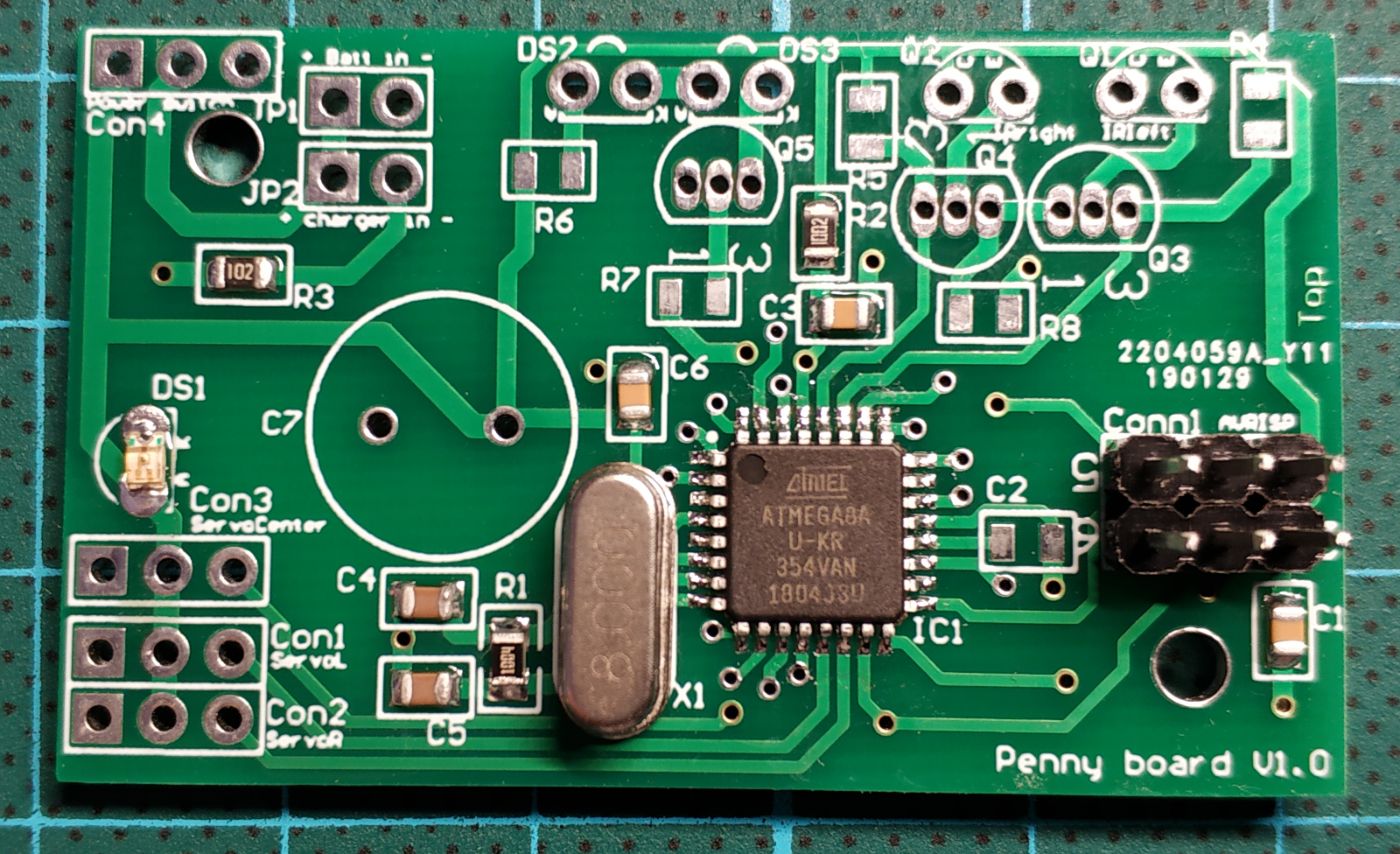
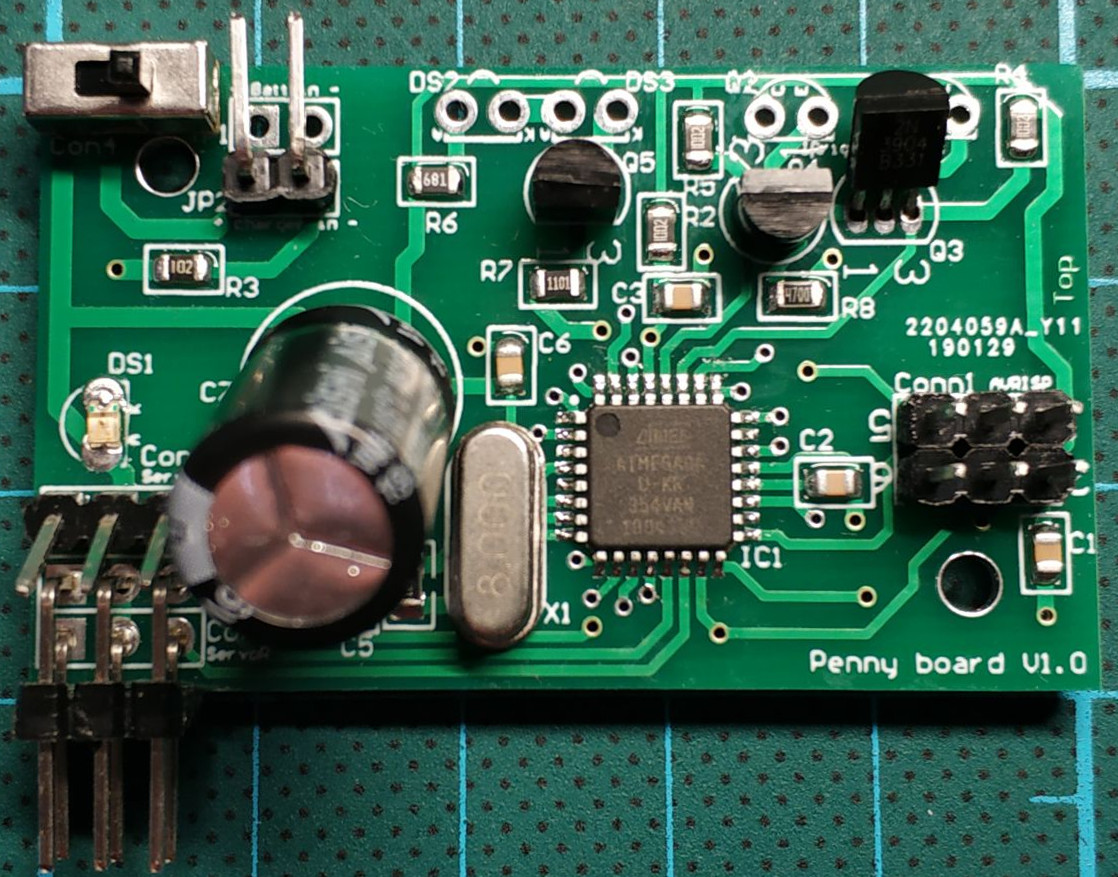
. hardware/motherboard/. :
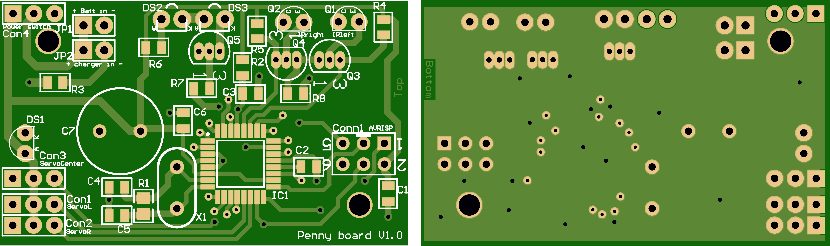
ATMega8 , . :
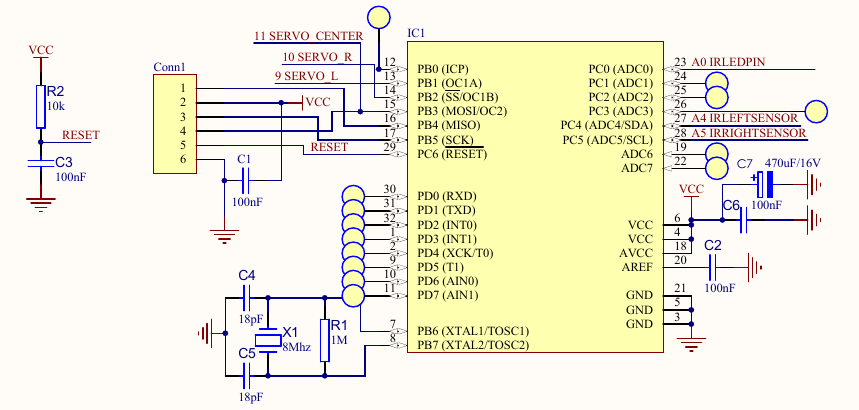
, , , . :
N.B. , ATMega8A 2.7-5.5, 6. — NiMH 1.2V . (6.4 ), , . , , !
( ):
, . ; . , , . , , , :
:
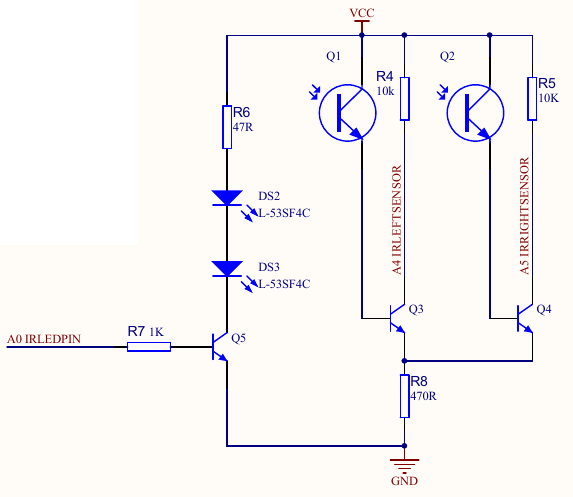
; , Q3 Q4 "" Vcc, , . :
, , , R6. 47 55 , ( ). , , (910 )!
( ). , CR2032, . ( , [] , , )
, , Q3 Q4 . , , , , , .
, . , . 2n3904, , , . , , .
, , , , :
.
, , :
- isf471 2n3904.
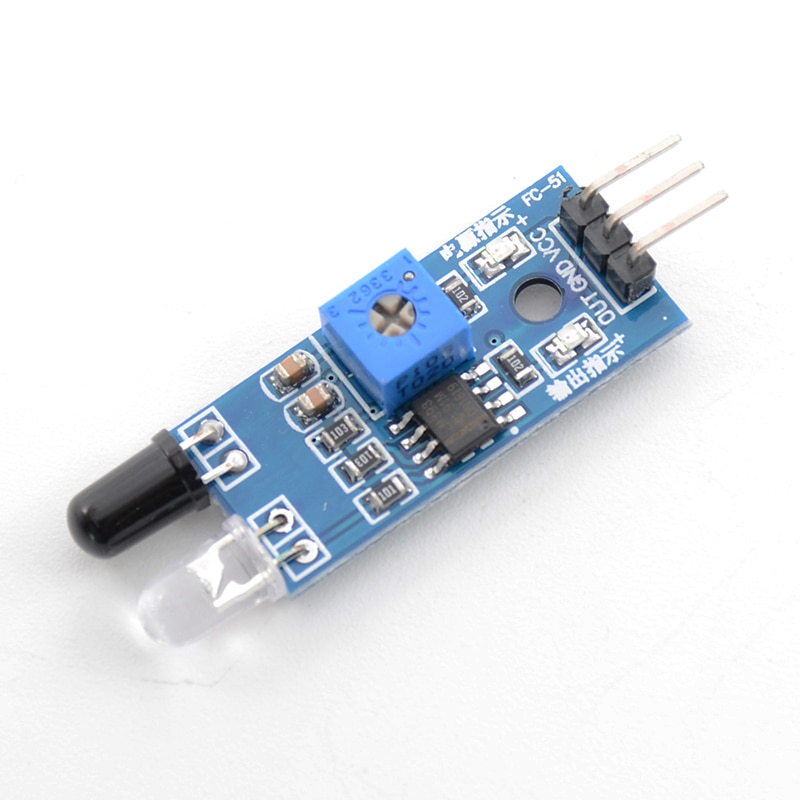
- Sharp GP2Y0A21YK0F:

- LM393:
, , , ATMega8. :
-
50 ; 1 (0 ), 2 (90 ). , 16 (timer1), (timer2). , Servo.h , , fast PWM.
8 , timer1 1 ( 8).
ICR1 TOP (20000), , 20 , 50 . OCR1A OCR1B ( ) .
. timer2, , , ICR1, , . , 50 , , - :
- timer2 128, , 4.096 ms = 256 * 128/(8 * 10^6).
- timer2, , .
- capture interrupt timer1 timer2 ( ).
4 2 , , 20 . , (1.5 ), :
OCR1A = 1500;
OCR1B = 1500;
OCR2 = 1500/16;
-, :
const uint8_t zero[3] = {45, 50, 40};
const uint8_t range[3] = {25, 25, 20};
zero[3] , (. ). , 45° ( ), 45° , . , range[3] . , i zero[i]-range[i] zero[i]+range[i].
( , 0°-90°) uint8_t pos[3]. update_servo_timers() - . pos[i]=zero[i]+range[i] i=0,1,2.
. pos_beg[3], pos_end[3], time_start[3] duration[3]. , . :
pos[0] pos_beg[0], , ;pos_end[0] (- );time_start[0] (, );- , ,
duration[0] ( ). , (pos_end[0]-pos_beg[0])/duration[0] /.
movement_planner(), pos[] , update_servo_timers(), - pos[].
, , , ( ) . , . , . , :
- 1:
{zero[0]-range[0], zero[1]-range[1], zero[2]+range[2]} - 2:
{zero[0]-range[0], zero[1]-range[1], zero[2]-range[2]} - 3:
{zero[0]+range[0], zero[1]+range[1], zero[2]-range[2]} - 4:
{zero[0]+range[0], zero[1]+range[1], zero[2]+range[2]}
2 ( ):
const int8_t advance_sequence[4][3] = {{-1, -1, 1}, {-1, -1, -1}, { 1, 1, -1}, { 1, 1, 1}};
, i step zero[i] + range[i]*advance_sequence[step][i].
:
uint8_t step = steps_per_sequence-1;
while (1) {
if (is_movement_finished()) {
step = (step + 1) % 4;
plan_next_movement(step, advance_sequence);
}
movement_planner();
_delay_ms(1);
}
, , 4 5 . , ( , ), adc_left_eye adc_right_eye , :
adc_left_eye = adc_left_eye *.99 + adc_read(5)*.01;
adc_right_eye = adc_right_eye*.99 + adc_read(4)*.01;
_delay_ms() , .99 1-.99 .
:
uint8_t lobst = adc_left_eye < distance_threshold;
uint8_t robst = adc_right_eye < distance_threshold;
(, ) :
if (is_movement_finished()) {
if (!lobst && !robst) {
sequence = advance_sequence;
} else if (lobst && robst) {
sequence = retreat_sequence;
} else if (lobst && !robst) {
sequence = turn_right_sequence;
} else if (!lobst && robst) {
sequence = turn_left_sequence;
}
step = (step + 1) % steps_per_sequence;
plan_next_movement(step, sequence);
}
, !
! , , :
:
- "", . , , . , ?
- ( !) , , .
- , , avr-gcc . , - .
:
, V2 , ! , // :
- — , ;
- , RC- ;
- ;
- R6 ;
- ( ) ;
- — . — , ;
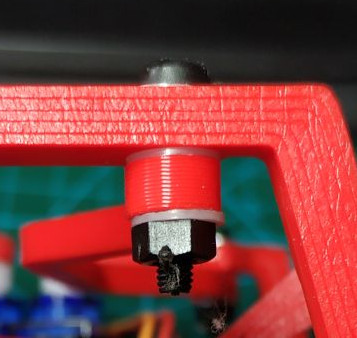
- حرك المنحل بالكهرباء قليلا. اضطررت إلى إمالة ذلك ، لأنه خلاف ذلك ، تؤذيه الساق اليسرى المركزية.
- إضافة مواقع اختبار مع سهولة الوصول إليها باستخدام راسم الذبذبات ؛
- إضافة زوج من مصابيح LED لتصحيح الأخطاء بدون منظار الذبذبات ؛
- أضف وسادات اللحام لجميع أرجل المعالجات الدقيقة غير المستخدمة لتصحيح الأخطاء وتوسيع الروبوت.
استنتاج
بيتيا هي متعة رهيبة!
